
基于DoDAF的民机MBSE研制方法
2021-11-29 03:47王雨农毕文豪
系统工程与电子技术 2021年12期
王雨农, 毕文豪, 张 安,*, 詹 超
(1.西北工业大学航空学院, 陕西 西安 710072;2.中国商用飞机有限责任公司上海飞机设计研究院,上海 200120)
0 引 言
飞机设计是一项复杂的长周期工作。传统的飞机设计工作通常分为拟定设计要求、概念设计、初步设计、详细设计等多个阶段进行[1]。设计人员在利益相关方提出初始需求后,选择并确定飞机布局形式和总体设计参数,并在后续设计过程中经过计算、分析、修正对设计方案进行修改,使所设计出来的飞机以优良的性能最大程度地满足使用方的要求。在此过程中产生的报告、图样、试验数据及财务信息等工程数据大多采用文档文件记录的方式。因此在研究设计过程中存在以下问题[2]。
(1) 无法完整捕获需求
在传统的飞机设计过程中,研究人员通常通过自身的研制经验确定飞机设计需求,在项目伊始难于全面提出完整正确的飞机需求,易造成各系统定义的系统需求不能完全满足飞机需求[3]。缺乏明确的需求捕获与分析过程,这极易造成需求捕获不全面的问题,并且使得设计人员难以正确估计设计过程中可能产生的风险,增加设计研发过程中的不确定性,提高研发的难度,甚至会导致民机研发工作的失败。
(2) 需求与设计的一致性难以保证
在传统飞机设计过程中,利益相关方及设计人员多采用自然语言对需求进行描述。由于自然语言的模糊性,难以全面准确地描述需求的各项属性,在传递过程中容易出现属性缺失、属性表述错误等情况。同时,不同人员由于文化背景不同,对需求的理解也会产生分歧,出现对于研制要求及设计方案的描述偏差的情况,难以保证设计与初始需求的一致性,导致各个系统无法共同协作实现飞机的整体功能要求。
(3) 设计方案难以更改,市场响应速度慢
传统的飞机设计流程是在利益相关方提出需求后,经过初步分析后对飞机整体进行设计并在之后的阶段对该方案进行调整与细化,最终得到详细设计方案。随着现代民机的性能指标不断提升以及电子综合化的趋势,民机顶层设计的复杂程度逐渐提高,其各个子系统相互交联、相互作用,功能之间交叉、重复,民机研制过程中的很多能力和系统边界变得模糊[4],这种方法使得设计方案一旦确定便难以修改,不利于飞机构型管理。当需求出现变更时,必须针对飞机整体进行重新设计,从而造成大量时间、精力和金钱的浪费。
基于以上提出的3个问题,本文提出了基于美国国防部架构框架(Department of Defense Architecture Framework, DoDAF)的民机基于模型的系统工程(model-based systems engineering, MBSE)研制方法。该方法引入了DoDAF的多视图模型描述方法,通过场景捕获需求,从多角度构建民用飞机的设计模型并根据DODAF各视图规范了模型描述方法,对飞机需求进行全面地分解与细化,采用模型传递工程数据,结合多种视图开发信息更加立体的飞机模型,通过系统的分析归纳,层层递进,最终得出详细的设计要求,使得飞机研制流程完整、准确,从而更好地指导民机研制,提高民机研制效率。
1 MBSE方法研究进展
随着科学技术的发展,民用飞机的功能与复杂性正在成倍增加,而产品开发周期在市场的要求下不断缩短,因此变革是必要的。以更少的时间制造出更有能力且缺陷更少的系统是民用飞机研制方法发展的方向。在需求牵引和技术推动下,MBSE方法成为提高民机研制效率的一个重要方法。2007年,国际系统工程学会在《系统工程2020年愿景》中,正式提出了MBSE的定义: MBSE是建模方法的形式化应用,使建模方法支持系统要求、设计、分析、验证和确认等活动,这些活动从概念性设计阶段开始,持续贯穿到设计开发以及之后的所有寿命周期阶段[5]。该方法以模型作为分析与交流的工具,避免文本作为捕获工程数据的主要手段。基于模型的系统工程相对于传统的系统工程有诸多不可替代的优势,在建模语言、建模思路、建模工具上有重大转变[6-7]。
由于MBSE方法在产品研制过程中的优势,国内外研究学者对其做了深入的研究[8-11]。Kaslow等人通过建立一个可执行的MBSE模型,验证了如何实现RAX CubeSat(radio aurora explorer cube satellite)在太空中的任务要求[12]。Ferreira等人应用MBSE将CMs(control maintenance system)与Fs(fuel system)集成设计并实现了仿真[13]。Pessa用系统建模言(systems modeling language,SysML)在Visual Paradigm software中基于MBSE开发了AGVs(automated guided vehicles)的控制器,并在Microsoft Visual Studio环境中实现了该控制,利用设计的AGV按照既定路径完成对运输材料的拖车的牵引[14]。
目前较为常用的8种MBSE方法分别是:Harmony-SE方法、面向对象的系统工程方法(object-oriented system engineering method, OOSEM)、Vitech MBSE方法、状态分析(state analysis,SA)法、对象过程方法(object-process methodology,OPM)、Magic Grid方法、理性统一过程系统工程(rational unified process for system engineering, RUP-SE)以及Arcadia方法。这8种方法均已应用于复杂系统的设计中[15-16],但由于自身特点的不同,其所应用的行业领域也存在着许多不同[17-19]。在8种MBSE方法中,目前应用较广的MBSE方法有Harmony-SE方法, OOSEM方法,RUP-SE方法等。其中OOSEM方法主要面向IT行业,Harmony-SE方法主要面向制造业并已经在航空业内[20-21]广泛使用。但由于Harmony-SE方法更注重于设计的流程,其对于模型的表述方法过于单一,无法全面地描述模型并建立相应的描述规则,虽然在比较小的系统或子系统建模方面有很好地实践性,但是对于民用客机这种复杂大型系统无法从能力、功能、系统多个角度对飞机能力进行完整与精确地分析,难以完整支撑整个设计流程。
2 基于DoDAF的民机MBSE研制流程
DoDAF是美国国防部对C4ISR(command, control, communication, computer, intelligence, surveillance, reconnaissance)体系结构框架的继承和完善,能够帮助决策者从多个部门、联合能力领域、任务、组件和程序边界中获取并有效的组织融合信息,从而提高制定关键决策的能力。DoDAF不仅可用于指导国防指挥控制系统和武器装备研制,还能广泛运用到各种商业运作过程中的管理和研发活动[22-24]。
在民用航空领域,美国联邦航空管理局也借鉴了DoDAF多视图分析技术,在美国国家空域系统(National Airspace System, NAS)[25]的体系规划和设计中也采用了DoDAF的OV、SV、TV视图等架构工具对国家航空空域的各个系统进行描述。该体系框架具有多个不同视点,能够从能力、功能、系统多个角度出发清晰描述各子系统之间交联关系,从而充分考虑到每一个需求,保证设计与需求的一致性。
通过对DoDAF和民机研制过程的深入研究[26-27],根据民用飞机能力要求,本文提出了基于DoDAF的民机MBSE研制方法:在捕获正常飞行场景下的部分飞机级需求后对其进行分析与细化,完成需求分析、功能分析及功能建模3个阶段,最终得到飞机各个子系统之间的交联关系,并生成资源流动模型、活动模型以及系统接口模型等,开发出信息更加立体的民用飞机系统级能力模型以进入下一级循环分析。
该方法规定设计过程中产生的工程数据应以模型的形式进行存储与传递,保证了信息传递的一致性与完整性;通过DoDAF的多视图对模型进行精准全面的描述,在设计过程中不断分析细化,深度剖析各系统功能及系统间的交联关系;在不同层级的需求之间建立可追溯性链接,当某个需求发生变化时能够迅速链接到相关需求并对其进行更新。相较于传统民机研发方法,研究过程更加直观与精确,更有利于研发工作的开展,如图1所示。

图1 基于DoDAF的MBSE研制体系流程Fig.1 Development process of MBSE system based on DoDAF
该方法的设计过程分为需求捕获、需求分析、功能分析与功能建模4个阶段,其具体的构建流程如下。
(1) 需求捕获阶段:在总体概要信息视图(AV-1视图)中对飞机基础能力愿景进行定义。飞机基础能力愿景由利益相关方所提出的初始需求经过研究人员的初步分析得来,规定了飞机的任务与范围。AV-1视图为用例图,通过描述飞机与利益相关方的相互作用来捕捉对民用飞机的基础能力愿景,并在后续的阶段中对该基础能力愿景进行分析与细化。以民机的正常飞行场景为例,民机的任务就是采用飞行的方式将乘客安全地从起点载运到终点,其飞行过程可分为起飞、爬升、巡航、下降、进近和着陆6个阶段[28],如图2所示。
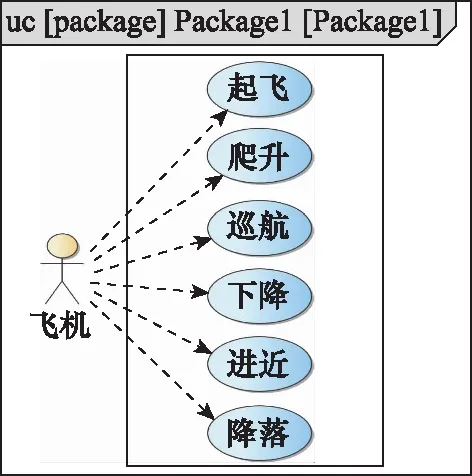
图2 飞机任务图Fig.2 Aircraft mission map
(2) 需求分析阶段:该阶段对飞机基础能力愿景进行分析与细化,产生达到该能力愿景所应具备的能力,生成具体的能力需求,并建立需求间依赖模型。
① 在AV-1视图的基础上对每一基础能力愿景进行深入分析,不断对其属性进行添加与更改,使得能力愿景更加精准全面,从而建立飞机级能力愿景,并在构想模型(CV-1视图)中通过需求条目的形式进行存储。
以需求捕获阶段所确定的飞机任务为例,对需求进行详细分析,生成飞机级能力愿景,为下一步从中提炼飞机能力做准备。分析后得到的飞机级能力愿景如表1所示。
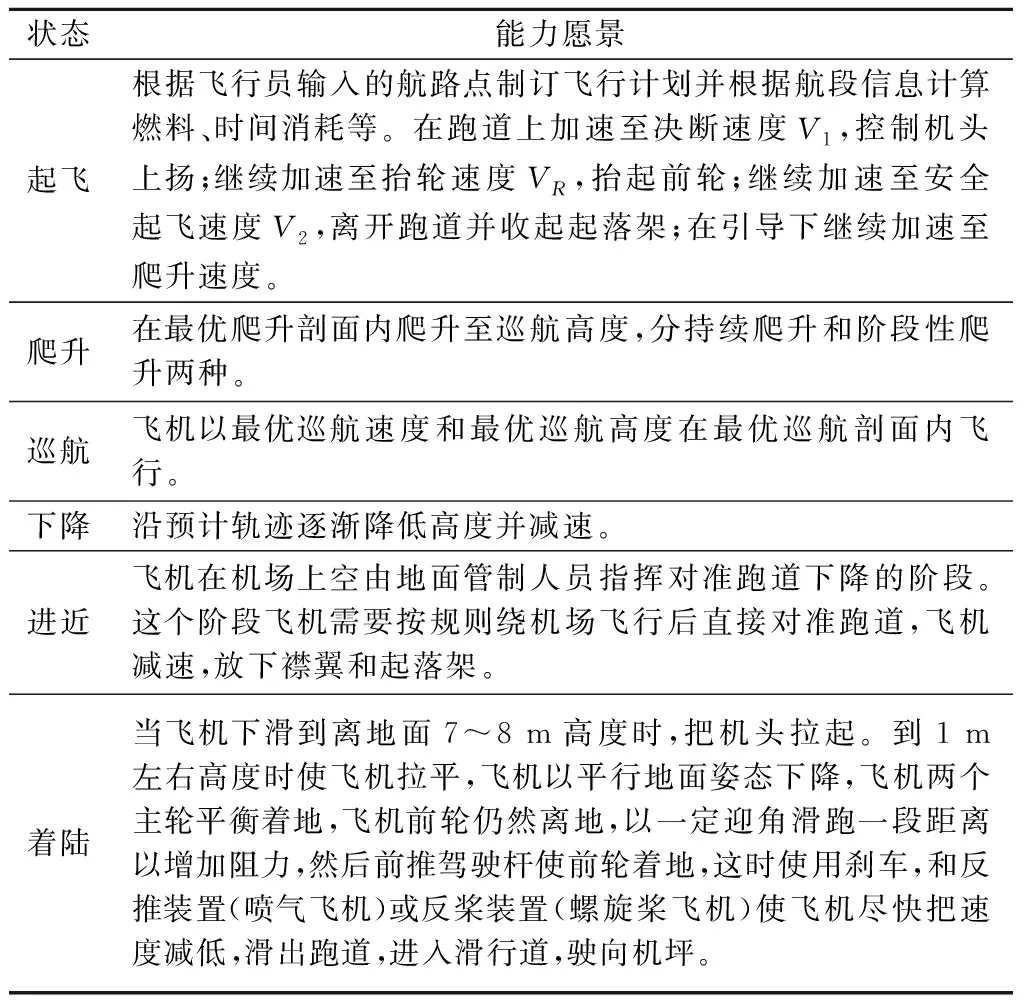
表1 飞机级能力愿景
② 通过建立运行场景用例,通过用例对民用飞机的飞机级能力愿景进行分解,从而得到具体的能力要求,在能力分级描述模型(CV-2视图)中存储。
根据上文中CV-1视图的6项飞机级能力愿景分析得出每一项的能力需求,共分解出18项能力,如图3所示,其中某些能力会在多个飞行阶段中作用,如高度控制、马赫数控制等。
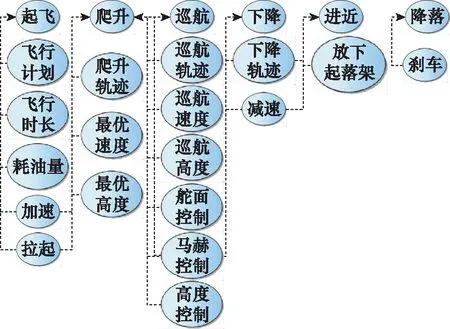
图3 能力细化分解图Fig.3 Capability breakdown diagram
③ 对CV-2中的所有能力之间的依赖交联关系进行梳理得到能力依赖模型(CV-4视图)。需要注意的是,依赖并不是一对一的关系,多项能力需求根据其在场景中的交互关系组成了一个复杂的依赖关系网。
梳理CV-2视图中的18项计划能力,得到能力依赖关系模型CV-4视图,如图4所示。例如巡航轨迹依赖于整体的飞行计划,巡航高度依赖巡航轨迹,高度控制依赖于预测巡航高度(图4中红色依赖关系)。
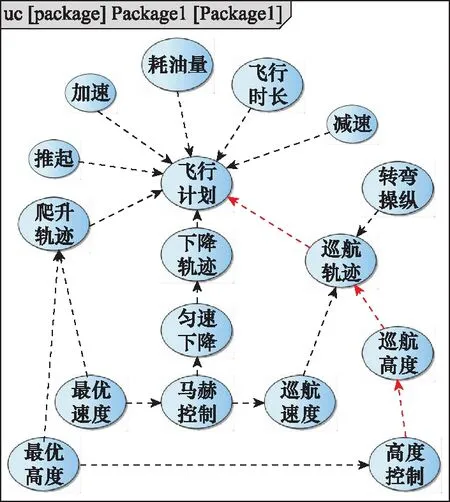
图4 能力依赖关系Fig.4 Capability dependency relationship
(3) 功能分析阶段:该阶段同时对需求分析阶段产生的每一个能力需求进行功能分析。针对CV-2视图中的每一个能力都需要单独地进行建模,采用并行开发、增量迭代的方式从而提高研制效率。
① 选取CV-2视图中的一个能力需求,分析与该能力需求相关的各子系统之间如何协同工作及其交联关系,建立其操作概念视图(OV-1视图)。
以上文需求分析阶段生成的多项能力中的高度控制能力为例来建立操作视图。
高度控制能力是指在飞机的远距离巡航阶段使其保持在固定高度稳定飞行的能力。对于民用飞机而言,大多采用自动驾驶仪对飞行高度进行设定与校准,即当飞机偏离原始状态,飞机外部传感器感受到偏离方向与大小,并输出相应信号,经放大、计算处理,操纵相应作动器(舵机),使控制面(舵面)相应偏转。当飞机回到原始状态时,传感器输出信号为零,作动器以及与其相连接的控制面也回到原位,飞机按原始状态飞行。
该能力主要与飞控系统相关,并通过控制面的偏转实现。该能力主要由飞控系统中的飞控计算机、传感器、舵回路等子系统完成,因此本文主要对飞控系统的子系统层级进行分析,在该层级建立操作视图。高度控制的OV-1视图如图5所示。
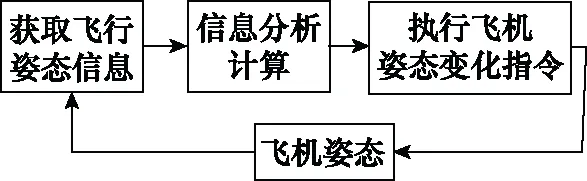
图5 高度控制的操作概念图Fig.5 Highly controlled operation concept diagram
② 根据其交互关系建立节点并对各子系统进行分类将其归入不同节点中,以模块定义图的形式建立各子系统之间的资源流动模型OV-2视图,从而描述各个节点之间的关系及资源流动过程。
根据高度控制的操作概念图可建立操作“高度控制”的活动资源流模型(OV-2视图),如图6所示。分为传感器模块、飞行控制模块、执行模块3个节点,其中传感器模块包括无线电、垂直陀螺和速率陀螺等机载探测设备,飞行控制模块包括飞控计算机、舵回路、作动器等设备,执行模块包括液压器和升降舵。节点之间的资源流用Flow表示,每一条Flow传递一条信息。传感器模块在获取到高度、俯仰角及俯仰角速率信息后,将其传递至飞控模块,经过飞控模块分析计算后获取舵机指令通过作动器传递至执行模块,从而改变飞机飞行姿态。
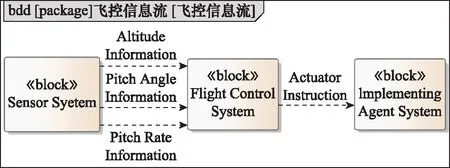
图6 高度控制能力的活动资源流Fig.6 Highly controlled activity resource flow
③ 在资源流动模型的基础上,即可进一步建立该操作的活动模型(OV-5a/b视图)以及状态模型(OV-6b视图)和事件顺序模型(OV-6c视图),用以梳理各节点间的信息传递顺序或控制流顺序,同时针对各节点进行泳道划分,明确泳道中的活动及活动间联系,以辅助后续的接口设计工作。
根据高度控制能力的操作概念图及活动资源流模型,梳理其控制流顺序或信息传递顺序建立了操作活动视图(OV-5b视图),针对OV-2视图中的3个节点进行了泳道划分,将整个高度控制过程分为传感器模块感应阶段,飞控模块分析计算阶段及执行模块执行阶段,明确了各个泳道内的活动以及活动之间的联系,便于之后的系统接口定义。如图7所示。
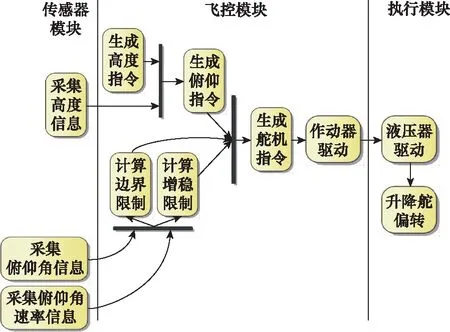
图7 高度控制的活动图Fig.7 Activity diagram for height control
(4) 功能建模阶段:该阶段同上一阶段类似,也采用并行开发、增量迭代的方式进行研制。为了实现操作视图中的这些抽象活动,需要将这些活动分配到具体的系统当中,用系统功能活动代替操作活动,明确各个活动之间的数据流。
① 在活动模型基础上建立活动与系统的关系,将活动模型中的活动对应到系统并建立能力相关系统的功能描述(SV-4视图),不同的泳道代表不同的系统,每个系统包含多个系统功能,同时活动与系统的支持关系矩阵(SV-5视图)也将被建立,用于描述每个活动由哪些系统参与完成,每个系统可以支持哪些活动;
② 由SV-4视图中系统之间的信息传递可对系统接口描述(SV-1视图)和系统资源流描述(SV-2视图)以内部模块图的形式进行建模,以显示内部各子系统组成部分之间的关系,以及各子系统之间的接口。
同样以高度控制能力为例:在OV-5b视图的基础上建立系统功能描述模型(SV-4视图)如图8所示。不同的泳道代表不同的系统,与高度控制能力相关的系统有:传感器系统、飞行管理系统、飞行控制系统、自动飞行系统、液压系统及控制面。将功能分析阶段得出的各项活动分配至SV-4视图中与各系统对应,每个系统包含多个系统功能。通过对比SV-4视图的系统功能描述以及上面的高度控制活动图OV-5b视图,可以建立活动-系统跟踪矩阵SV-5视图,用于描述每个活动由哪些系统参与完成,每个系统可以支持哪些活动,具体的跟踪矩阵这里不再赘述。
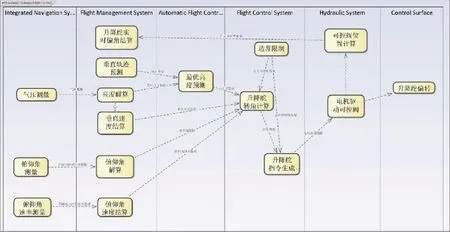
图8 高度控制的系统功能描述Fig.8 Highly controlled system function description
通过上面的系统功能描述,系统之间的数据接口可以清晰显现出来,将其进行归纳可以得到系统接口描述模型(SV-1视图),如图9所示。
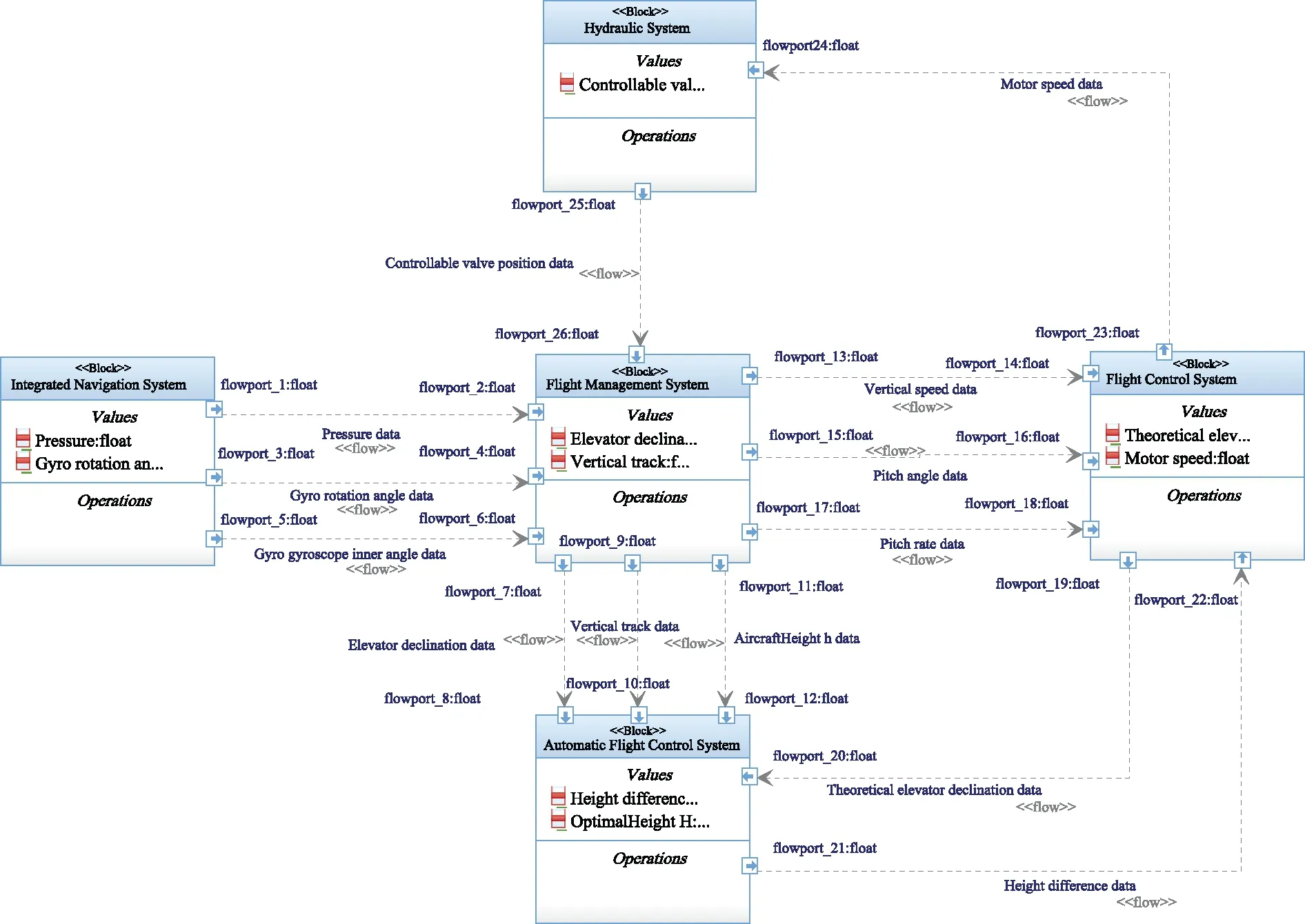
图9 高度控制的系统接口描述Fig.9 Highly controlled system interface description
至此,关于飞机高度控制能力的分析建模已经基本完成,得到了该功能的资源流动模型、活动模型以及系统接口模型等。
由于本文只选取了高度控制这一项能力进行分析建模,所得到的系统接口模型并不完整,需要采用同样的方法对所有的能力进行分析建模,得到每一项能力的系统模型,将其整合成一个完整的飞机子系统接口模型,这些系统接口模型接下来可用于飞机研制过程。
在整个流程中,需求捕获阶段将市场需求转化为飞机级需求;需求分析、功能分析、功能建模3个阶段将飞机级需求转化为系统级需求。在完成以上4个阶段后,设计人员应将转化后生成的系统级需求作为初始需求输入并再次进入需求分析阶段进行循环,直到产生详细而准确的部件级需求为止。在此过程中,应在不同层级需求(如飞机级需求与系统级需求)之间建立可追溯性链接,以保证当需求需要进行变更时能迅速追溯到与之相关的其他需求,从而减少返工工作、提高研制效率。
3 结 论
本文针对民用飞机在研制过程中出现的设计需求不完整、难以保证设计与需求的一致性、设计方案变更工作量大等一系列问题,提出了基于DoDAF的民机MBSE研制方法。该方法通过模型的方式传递工程数据,并将DoDAF的多个视角应用于模型的构建过程中从各个角度对模型进行描述,并在后续设计分析过程中对飞机能力要求进行分析与细化,逐步递推,最终得到各个子系统的系统视图,更加准确细致地描述飞机研制要求。此外,在不同层级的能力需求模型间建立可追溯性链接直至研发工作结束,使得每一条需求的来源与后续流向都清晰可见,极大地保证了设计与需求的一致性。同时,当设计需求发生变化时,设计研发人员能够通过可追溯性链接迅速寻找到需要变更的所有需求,极大地减少工作量,提高研制效率。该研制方法由多种视图组成,并在流程中详细规范了每一视图所用的工具与模型,将分析流程规范化,为研究人员提供了一条明确规范的研制流程,减少了研制过程中由于经验不足而产生的重复工作。
本文采用该方法捕获民用飞机的部分能力,对拟定的飞机能力要求进行分解细化,建立能力之间的交联关系。针对高度控制这一能力要求,建立高度控制这一子系统的系统模型,详细给出该系统的数据接口信息与资源流信息。在实践过程中该方法体现出诸多优点:
(1) 将复杂大系统严格有序地分解为多个能力,通过对能力进行并行分析,简化了研制复杂度,提高研制效率;
(2) 从多个角度对飞机进行建模,使模型信息更加立体,提高了模型的完整性与正确性,使得研究人员能够更加清晰准确地对系统进行分析;提高了模型的可理解性,便于开发者与项目利益相关者和实施者以及开发者之间的信息交流;
(3) 通过模型传递工程数据,增加了工程数据的直观性与完整性,保证了设计与需求的一致性。
因此,基于DoDAF的民机研制方法能够详细精确地描述飞机研制要求,相较于传统民用飞机研制方法有很多优点,更加适合超大型系统工程的开发,有利于指导民机研制工作。
猜你喜欢
壹读(2022年12期)2022-03-24
金桥(2021年11期)2021-11-20
民用飞机设计与研究(2019年2期)2019-08-05
纤维复合材料(2018年3期)2018-04-25
生态文明新时代(2018年2期)2018-03-21
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
北京航空航天大学学报(2017年12期)2017-04-23
