
波束折射模型在天线罩补偿中的应用
2021-11-29 03:47马小梦毕建权
系统工程与电子技术 2021年12期
马小梦, 何 岷, 毕建权
(北京遥感设备研究所, 北京 100854)
0 引 言
弹载和机载导引头由于工作环境的特殊性,都需要天线罩作为保护装置为其提供较为稳定的工作环境。天线罩为了满足空气动力学特性,一般设计为流体型结构,但该结构导致导引头产生了瞄准误差。同时天线罩为电介质材料构成,导致导引头波束能量产生损失。
针对天线罩对天线波束性能的影响,提出了天线罩设计、电磁特性分析等方法来提升天线阵列的工作性能。天线罩结构设计技术包括区间分析和不均匀平面层,区间分析方法将厚度公差和区间功率相结合,实现了天线罩电磁性能的提升[1-2],为了更加精准地检测厚度误差,提出了扇形区域和凸多边形近似Minkowski和技术[3]。可变厚度天线罩相比于均匀厚度天线罩电磁性能较为优异[4-5],然而厚度不是影响电磁性能的唯一因素,天线罩的介电常数对波束幅度相位均产生影响,通过为天线罩添加不均匀复介电常数平面层可以减少这一影响[6]。夹层式天线罩结构设计对于导引头电气性能具有很大影响,文献[7]提出了一种精确的分析模型来设计天线罩层级结构,保证了天线罩良好的电气性能。文献[8]利用天线罩相对介电常数与反射和透射系数之间的解析表达式得到了相对介电常数最佳分布,构建了具有优异电气性能不同介电层的天线罩结构。文献[9]利用遗传算法对上述夹层式的天线罩结构进行了研究和优化。文献[10]提出了一种新型的天线罩分析和设计方法,该方法利用从特征基函数获得的全域宏基函数对天线罩进行建模,实现不同厚度和介电材料的天线罩电气性能分析。
天线罩电磁性能主要包括视轴误差和传输损耗,通过粒子群优化算法补偿天线罩引起的阵列等相位面可以抑制视轴误差[11-12]。文献[13]利用计算天线和方向图迭代法实现了天线罩视轴误差的快速计算,算子分离思想将天线罩结构参数和天线辐射参数采取不同的优化策略实现天线罩系统结构的优化[14]。物理光学方法可对天线罩进行相位分析[15],并结合天线方向图获取天线波束传播性能[16-17]。文献[18]基于物理光学建立了天线罩在飞行过程中的机电耦合模型,实现了天线罩电磁性能的评估和补偿,提升了导引头制导性能。天线罩也称为广角阻抗匹配,结合频率选择性表面技术获取天线罩广义散射矩阵实现天线辐射性能最佳优化[19-21]。 文献[22-23]基于频率选择性表面方法分别设计了具有高角度稳定性的双频复合天线罩和电磁波不对称传播的智能天线罩。天线罩电磁性能分析技术还包括全波法、体积表面积分方程和表面积分方法,该方法结合多级快速多极子算法实现对天线罩的加速分析[24-26]]。 文献[27-28]基于表面积分方法提出了迭代的混合方法,提升了天线和天线罩之间的影响因子计算精度。孔径积分方法通过对二维电磁波束的检测,实现对平面相控阵天线罩的电磁特性分析[29]。暗室测试系统可以实现天线罩电磁特性的有效分析,通过升级紧缩场测试系统实现了多波位连续测试和瞄准误差测试[30]。基于卡尔曼的方法通过建立雷达导引头的寄生环模型,实现实时补偿,提升导弹的稳定性和制导精度[31-32]。
本文以物理光学、有源相控阵天线波束角度控制原理和测角原理为理论基础,结合暗室测试平台构建了独特的天线罩补偿算法。通过电磁波折射理论分析阵列波束折射路径,得到天线罩产生的相位差值,结合有源相控阵天线阵列角度控制原理获取波束偏移模型。在该模型基础之上,通过暗室测试系统得到阵列不同波束指向角对应的天线方向图,检测出目标相对阵列的实际角度。通过获取该角度下阵列有无天线罩时所检测目标角度得到天线罩瞄准误差表,即天线罩测角补偿表。该算法有效地弥补了由天线罩带来的测角误差,对于提升导引头制导性能具有重要意义。
1 波束折射模型
天线罩介质层对相控阵天线阵列接收波束产生影响的根本原因,是信号以电磁波的形式在不同介质层中传播时,由于材料介电常数与磁导率的不同使得电磁波传播速度发生变化。同时,不同波束在天线罩中传播路径长度不同,使得不同波束的波程存在差异,最终导致波束的相位发生偏差和最大波束指向角度产生偏差。
假设天线罩介质层的介电常数和磁导率分别为εr和μr,电磁波在经过天线罩内部时会发生折射现象。
图1给出了有源相控阵天线阵列中天线单元在有罩和无罩两种状态下的波束发射路径,目的是为了计算天线罩介质层所产生的波程差,其中θi和θr分别为波束的入射角和折射角。
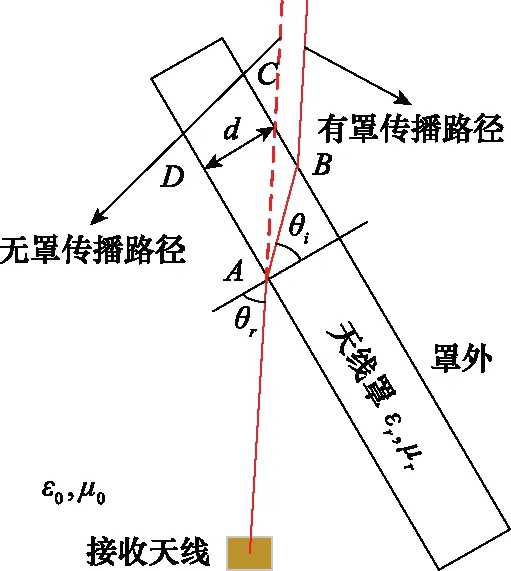
图1 天线罩内部波束传播路径Fig.1 Beam propagation path inside radome
电磁波在传入天线罩时,只有电磁波的波速受到影响,电磁波频率不变。电磁波在空气中和天线罩介质内的传播速度和电介质参数有关,在空气和天线罩中的波速分别为
(1)
为了得到天线罩对信号波束相位的具体影响,需要得到两种介质下的波束路径差。假设有源相控阵天线在某发射角度下的波束路径在天线罩介质层的厚度为di,由三角关系可以得到DAB=di/cosθi和DAC=di/cosθr,进而可以求得波束:
(2)
将天线罩介质层的波程路径长度DAB转换为在空气介质中的相对波程路径长度:
(3)
进而得到天线发射波束在无天线罩和有天线罩两种介质下的波束路径差:
(4)
(5)
通过电磁波的折射定律,发射电磁波在通过天线罩时入射角和折射角存在着数学关系:
(6)

(7)

有源相控阵导引头的频段在数10 GHz,其对应的波长在厘米波段,而波程差也在厘米波段,根据波数公式k=2π/λ可以看出,天线罩波程差的变化对波形相位影响甚大。将波程差和波束相位相关联,得到天线罩对波束指向的干扰公式。波束路径差导致天线发射波束产生相位差:
(8)
式中:λ为波束波长。阵列在接收角度θ0上的信号时馈电相位设定为
(9)
式中:n为有源相控阵天线阵中天线单元的序号;d为天线单元间的距离;θ0为阵列设定的最大波束指向角。天线罩导致的相位差使得馈电因子的相位变为
(10)
二者结合馈电因子相位可以得到:
(11)

(12)
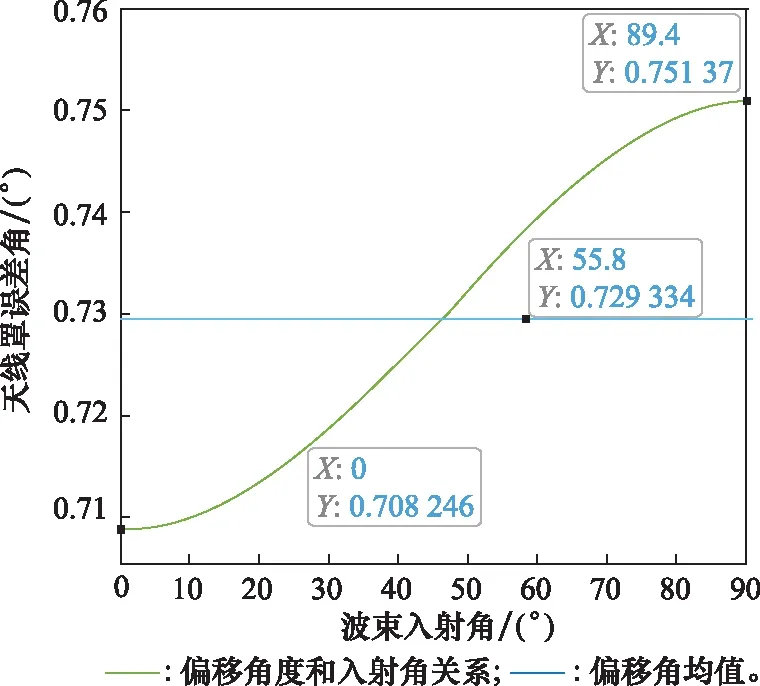
图2 最大波束指向角偏移量与入射角关系曲线Fig.2 Relationship curve between maximum beam pointing angle offset and incident angle
从图2可以看出,天线罩产生的波束指向误差角受到波束在天线罩表面的入射角影响,产生的误差角基本在0.729 3°左右。该误差模型可以抽象化为如图3所示的子模型。
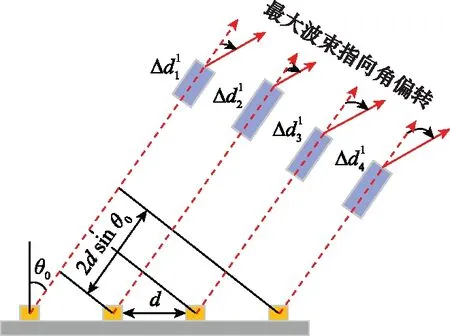
图3 天线罩误差因子模型Fig.3 Radome error factor model

2 阵列波束检测
基于天线罩误差模型和暗室测试系统,提出了有源相控阵导引头的天线罩校准算法。该算法分两部分完成,检测过程均为阵列对目标信号的接收。第一部分内容是检测阵列在有无天线罩时的天线方向图,第二部分根据所得到的两种状态下的天线方向图得到最大增益对应的角度,即接收最大波束指向角,在该角度下对目标进行两种状态下的目标角度检测。
2.1 阵列接收天线方向图
获取阵列接收天线方向图是获取准确角度补偿的前提,天线方向图反映了阵列在设定接收角度后,在不同的目标和阵列相对角度下接收强度的变化。而目标阵列的相对角度是由机械臂设定角度决定的,只有找到了最大波束指向角的位置,才能确定机械臂设定角度为多少时使得阵列接收信号强度最大,此时所检测的目标才是在有天线罩和无天线罩状态下最大强度所对应的同一角度目标。
为了便于分析,只考虑方位向阵列的天线方向图。首先需要得到无天线罩时有源相控阵天线阵列方向图,天线方向图为
(13)

基于上述原理,通过设定有源相控阵天线阵列的馈电因子相位,该相位可以通过移相器设定,确定阵列接收最大波束指向角度θ0。之后通过改变机械臂的方位角实现阵列在不同方位角度θ下的电场强度检测,该检测模型如图4所示。
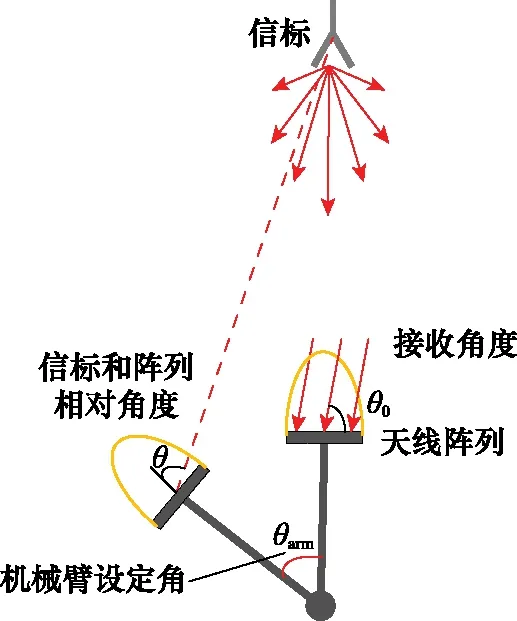
图4 天线方向图暗室检测原理图Fig.4 Schematic diagram of antenna pattern detection in darkroom
图4中,θ0移相器设定的波束接收角度,是有源相控阵天线阵列实现电扫的角度控制对象。θarm由中控机设定,改变的是馈电因子设定最大波束接收角为θ0时阵列的电场强度接收角度。由于机械臂的角度改变速率远远小于电控角度改变速率,为了提高有源相控阵天线阵列在暗室的天线方向图检测效率,提出了在机械臂角度θarm固定时改变电控角度θ0检测电场强度的策略。检测流程如图5所示。
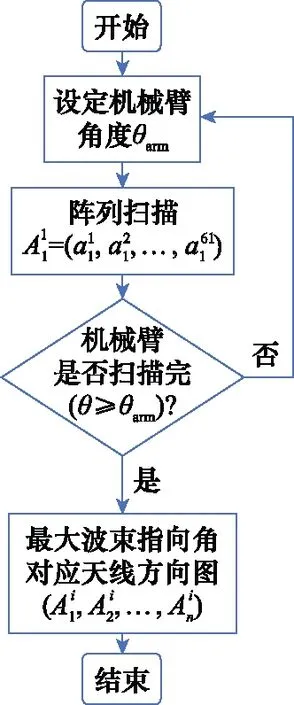
图5 天线方向图获取流程图Fig.5 Antenna pattern acquisition flowchart
此时检测阵列在有天线罩状态下的天线方向图,天线方向图函数为
(14)
式中:Δφ为天线罩介质层导致的最大波束相位差。在第1节中的天线罩误差模型已对其进行详细分析。使用相同的策略按照流程得到有天线罩状态下的天线方向图。天线方向图检测最主要的误差来源在于目标相对阵列角度和机械臂角度之间的关系式,只有精确地控制了机械臂角度和目标相对阵列角度,才能确保天线方向图中的角度是准确的。
2.2 目标角度检测
首先,简述阵列目标角度检测原理。利用第2.1节中检测的天线方向图流程获取在固定的阵列波束接收角度(θ0,φ0)对应的阵列和方向图Σf(θ,φ)、方位向差方向图Δf(θ)和俯仰向差方向图Δf(φ),利用3个方向图获得方位和俯仰向角度因子:
(15)
式(15)表述了目标相对阵列角度(θ,φ)与其所对应的差和方向图幅度值比之间的对应关系。当(θ,φ)=(θ0,φ0)时,该角度对应的差方向图幅度值最小,和方向图幅度值最大,即此时的Λ(θ)和Λ(φ)是最小的。通过这一规律可以判断出在有源相控阵天线阵列对目标进行角度探测时,通过电扫获取空间不同角度所对应的阵列差和波束比值,只有当电扫波束正对目标时阵列接收的波束才是主瓣波束,即差和比值最小,其所对应的电扫角度就是阵列对目标的检测角度。
(16)
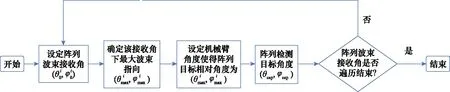
图6 目标角度检测流程图Fig.6 Flow chart of target angle detection
在不同的阵列波束接收角度(θn,φn)下分别检测对应的角度误差,最终获得天线罩检测角度误差补偿表。
3 实验及结论
依据天线罩校准算法为理论基础在暗室实验平台搭建了天线罩测试环境,对某型号弹载导引头天线罩进行特性分析。本次实验要求检测有源相控阵天线阵列在方位向θ=[-60°,60°],俯仰向φ=[-60°,60°]范围内采集不同电扫角度下的天线方向图和目标检测角度误差,检测的步进角度均为2°。
3.1 天线方向图实验
图7展示了在阵列设定波束接收角俯仰角为0°时,不同方位接收角度下的有无天线罩对应的天线方向图。从图7可以看出,天线罩的存在使得阵列天线方向图最大波束接收角发生了偏移,在设定的不同阵列波束接收角下天线罩所产生的误差是不同的。为了更加直观地展示阵列最大波束指向角偏移程度,图8绘制了天线方向图的最大波束指向角的偏移量变化曲线,在第1节天线罩波束指向误差模型中,通过仿真预测了阵列的最大波束指向角度受到天线罩处波束入射角的影响,且角度误差范围在0.729 3°左右。天线罩波束指向偏移模型的仿真结果受到设置参数的影响,但在合理的参数设置范围该偏移模型与实验结果吻合,验证了该分析模型的有效性。
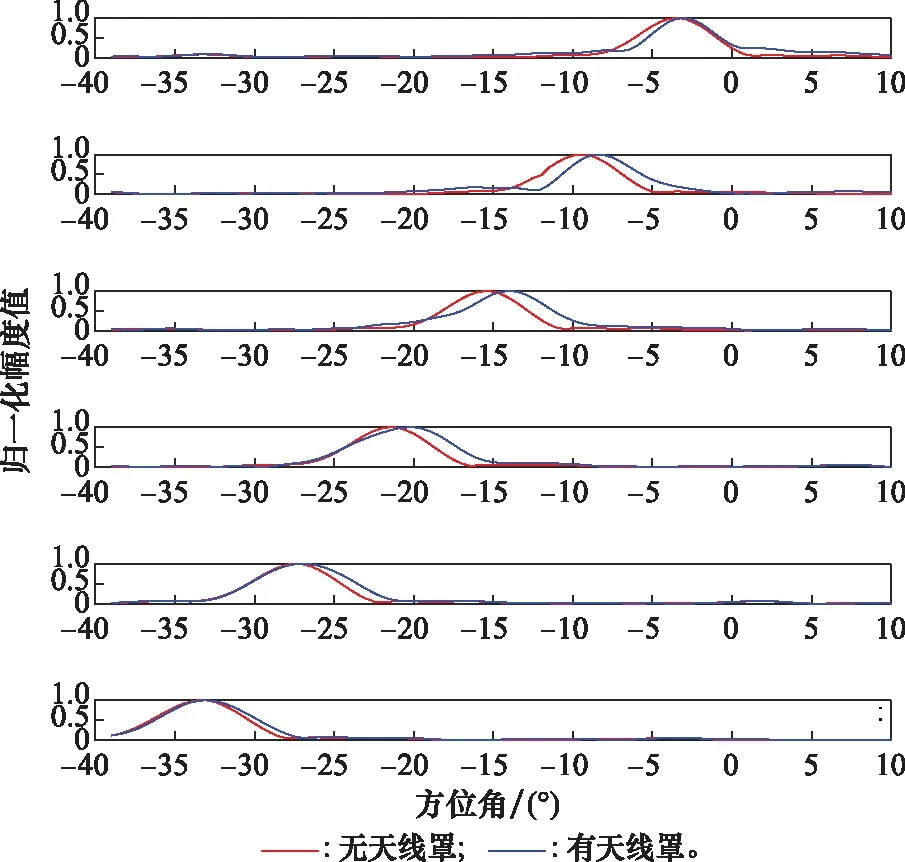
图7 阵列接收天线方向图Fig.7 Array receiving antenna pattern
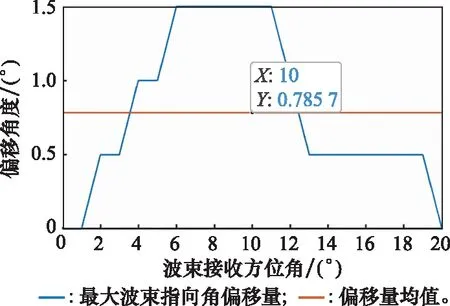
图8 最大波束指向角偏移量随波束接收方位角变化曲线Fig.8 Curve of maximum beam pointing angle deviation versus beam receiving azimuth
3.2 测角误差
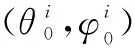
图9展示了有源相控阵天线阵列在安装天线罩后所引发的角度检测误差,最大误差达到1.5°,这一角度检测误差导致导弹制导性能损失很大。为了验证该角度检测误差表的补偿效果,对天线阵列带罩测试并对角度补偿,得到新的角度检测误差。图10直观地展示了对误差的抑制效果,角度误差一直在0.1°左右,表明该天线罩角度误差补偿是有效的,验证了天线罩校准算法的有效性。
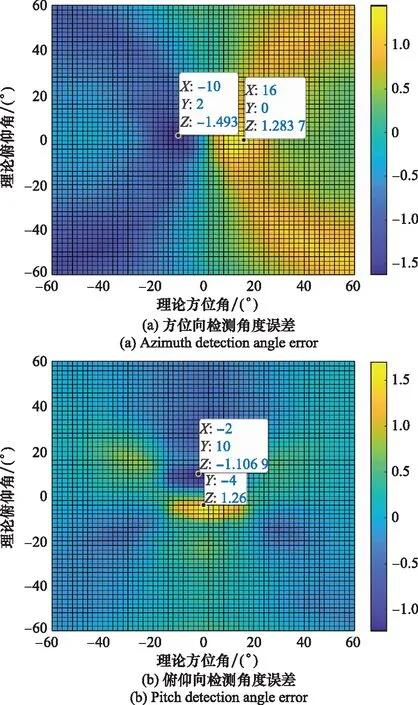
图9 方位向和俯仰向瞄准误差Fig.9 Azimuth and pitch aiming error
为了更加直观地展示补偿表对天线罩引起的阵列角度检测误差的校准效果,求出了补偿前和补偿后的角度检测误差均值及方差如表1所示。补偿后的测角误差均值减小了一个数量级,且方差的变化表明补偿后误差稳定在一定范围,无较大波动,验证了该方法的有效性。同时,该天线罩补偿算法无需对天线罩的结构和参数特性进行检测,直接补偿天线罩产生的测角误差,且对任何特性的天线罩都适用,具有普遍性;同时先机械臂转动后电扫的策略极大地提高了补偿效率。
图10 角度检测误差补偿效果图Fig.10 Diagram of angle detection error compensation
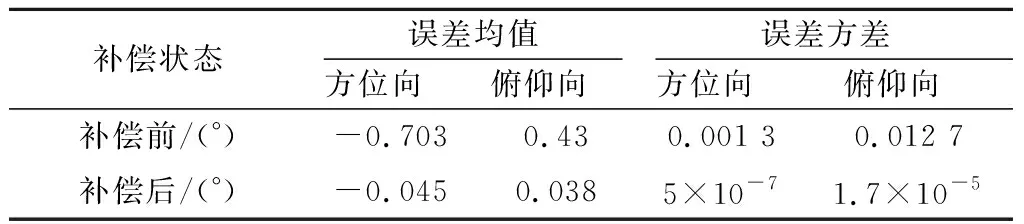
表1 测角误差均值及方差表
4 结 论
本文建立了天线罩折射物理模型和波束指向偏移数学模型,通过天线方向图检测实验验证了其正确性和有效性。
波束指向偏移模型和相控阵测角原理的结合定位了有天线罩时不同检测角所对应的最大波束指向,提升了测角误差的精度。检测角度误差具有独立性,即不同的天线罩其误差补偿存在差异;同时误差补偿具有局部拟合特性,即在对天线罩检测角度误差测试时无需遍历所有角度,在可接受步进角度范围检测出误差角后对未检测角度进行曲线拟合即可。这些特性充分体现了本文方法的创新性和先进性。
实验结果表明,补偿表将阵列测角误差降低了一个数量级,对于导引头制导性能稳定可靠具有重要意义。同时由于该模型基于有源相控阵角度控制原理,天线罩补偿具有一定的局限性。
猜你喜欢
上海建材(2022年2期)2022-07-28
陶瓷学报(2021年4期)2021-10-14
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
电子制作(2019年24期)2019-02-23
电子制作(2018年10期)2018-08-04
通信电源技术(2018年3期)2018-06-26
制导与引信(2017年3期)2017-11-02
现代防御技术(2016年1期)2016-06-01
火控雷达技术(2016年3期)2016-02-06
