基于负载转矩反馈的永磁同步电机动态面控制
2021-11-17 08:36沐俊文王仲根
计算机仿真 2021年5期
沐俊文,王仲根
(安徽理工大学电气与信息工程学院,安徽淮南 232001)
1 引言
永磁同步电动机(permanent magnet synchronous motor,PMSM)具有结构简单、运行可靠、体积小、质量轻、损耗小、效率高,以及电机的形状和尺寸可以灵活多样等显著优点。近年来,随着永磁材料性能的进步,以及永磁电机控制技术的完善,PMSM在工业领域有着广泛应用[1-3]。但是,PMSM是多变量、强耦合、非线性和变参数的复杂对象,为了获得优良的控制性能,需要研究一些可靠的控制算法[4-5]。目前,三相永磁交流调速矢量控制系统中的速度控制器普遍采用传统的PI调节器,其算法简单,可靠性高及参数整定方便。但是,当PMSM这一复杂系统受到外界扰动影响或电机内部参数变化时,传统的PI控制方法就不能满足控制系统的要求[6-7]。近年来,各种性能优越的算法被引入PMSM的控制系统来解决上述问题,如预测函数控制[8]、模糊控制[9]、卡尔曼滤波器控制[10]、神经网络控制[11][12]等。文献[13]设计了一种二阶非奇异终端滑模观测器来观测PMSM的负载扰动并使用前馈补偿的方法建立了抗干扰复合速度控制器;文献[14]提出了一种将自适应滑模控制和滑模干扰观测器相结合的混合控制策略,有效地提高了PMSM电流环同步响应、跟踪精度和鲁棒性;文献[15]提出了一种滑模控制与比例积分控制相结合的滑模干扰控制,有效地改善了闭环系统的性能;文献[16]提出一种基于快速非线性跟踪微分器和扰动观测器的鲁棒滑模控制策略,有效地提高了控制系统抗干扰性能;文献[17]提出了一种线性自抗扰控制器(active disturbances rejection controller, ADRC)的控制策略,改善了PMSM的运行性能。上述方法的提出有效地实现了调速系统的高性能控制,但这些方法大多实现非常复杂,缺乏通用性,工程应用中有诸多局限性[18]。另一方面针对PMSM在运行过程中因负载变化,而使控制系统性能下降的问题,利用转矩闭环控制会有较好的鲁棒性,但负载转矩的直接反馈很难达到理想的效果。
本文提出一种基于负载转矩反馈的永磁同步电机动态面控制(Dynamic Surface Control,DSC)策略,相较于传统控制策略有以下不同:定义了一组新型的PMSM系统状态变量方程,该方程使用积分形式,并保留了负载转矩控制量,从而改善了因负载转矩变化而导致控制系统性能不佳的问题;实验表明,与ADRC相比,本文所设计的新型控制系统有效地提高了PMSM的控制性能,同时针对负载变化而引起的扰动有良好的鲁棒性。
2 PMSM的数学建模
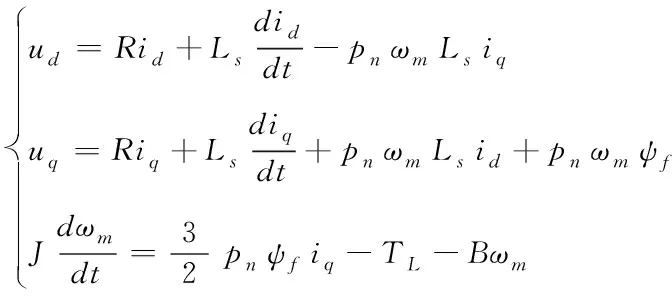
本文在实验验证与设计中将采用表贴式PMSM电机为控制对象,首先建立d-q坐标系下的数学模型
(1)
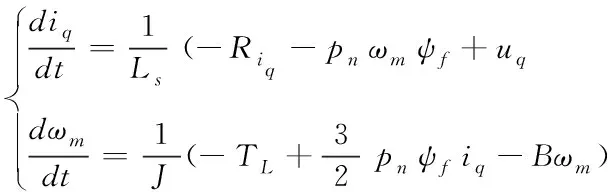
式中,ud、uq分别是定子电压的d-q轴分量,id、iq分别是定子电流的d-q轴分量,Ls为定子电感,R为定子电阻,ψf为永磁体磁链,ωm为电机的机械角速度,pn为极对数,TL为负载转矩,J为转动惯量,B为阻尼系数。
对于表贴式PMSM而言,采用id=0的转子磁场定向控制方法即可获得较好的控制效果,式(1)可变为如下的数学模型
(2)
3 动态面滑模控制器的设计
3.1 控制律的设计
根据式(2)所示的PMSM数学模型,定义PMSM系统的状态变量
(3)
式中,ωref为电机的参考转速,ωm为实际转速。由式(2)、(3)可知

(4)
为得到PMSM控制律方程,使用动态面控制策略设计,按照本文所定义的新型PMSM系统的状态变量方程,设计动态面滑模控制器,具体步骤如下:
定义位置误差
z1=x1-x1d
(5)

定义Lyapunov函数
(6)
则

(7)
定义
z2=x2-α1
(8)
则

(9)

(10)
考虑到位置跟踪、虚拟控制和滤波误差,定义Lyapunov函数
(11)
对V求导,并将z1、z2、y2求导后代入,得

(12)
设计控制器为

(13)
式中,c2为大于零的正常数。
3.2 稳定性分析
要证明动态面滑模控制器的稳定性,即证明:取V(0)≤p,p>0,则闭环系统所有信号有界,收敛。




(14)

(15)
4 干扰观测器的设计
为实时精确的获取负载转矩,需设计干扰观测器:考虑PMSM系统的运动方程
(16)
(17)
则
(18)



(19)
则干扰观测器设计为
(20)
由以上分析可以看出,在针对高性能PMSM控制系统和负载变化时控制系统鲁棒性问题上,大多数文献采用了引入先进的智能控制算法或将负载转矩直接反馈来抑制负载转矩变化引起的波动获得高性能的控制。本文则通过干扰观测器观测出负载转矩后,基于新建立的状态变量方程设计了新型的动态面滑模控制器,不仅避免了复杂的算法设计,而且解决了负载转矩与iq之间耦合关系不明确,控制性能不佳问题。
5 仿真验证
为验证本文所设计的控制系统的性能效果,在matlab/simulink环境下进行仿真研究,控制系统的仿真模型如图1所示。在仿真研究中,本文与文献[17]中所提出的ADRC方法进行比较,使用文献[17]的参数条件进行仿真验证。
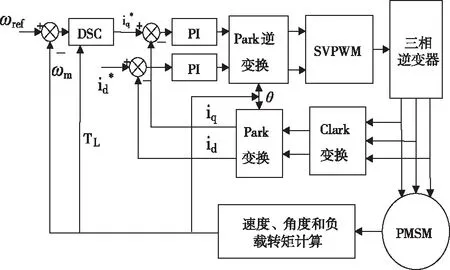
图1 DSC控制仿真图
选用的PMSM参数为:PN=1.82kW,Rs=1.9Ω,Ld=Lq=0.00334H,ψf=0.171Wb,J=1.469×10-3kg·m2,np=4。额定转速:6000r∕min。干扰观测器的参数:K=10000;DSC控制器的参数为:τ=0.003,r=1.5,c1=1+r=2.5,c2=0.5+r=2,x1d=0。
1)转速n=1000r∕min时,空载启动,全程无扰动,仿真结果如图2所示。
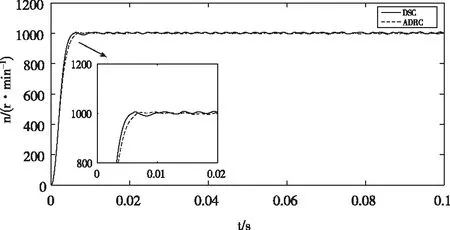
图2 1000r∕min响应曲线
2)转速n=1000r∕min时,空载启动,t=0.3s时转矩升为2N·m,仿真结果如图3所示。
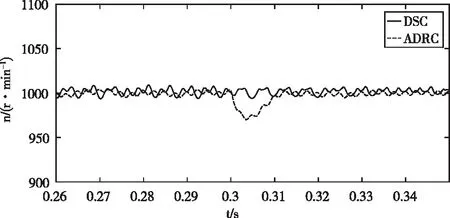
图3 t=0.3s时转矩升为2N·m响应曲线
3)转速n=1000r∕min时,2N·m转矩启动,t=0.3s时转矩降为0N·m,仿真结果如图4所示。
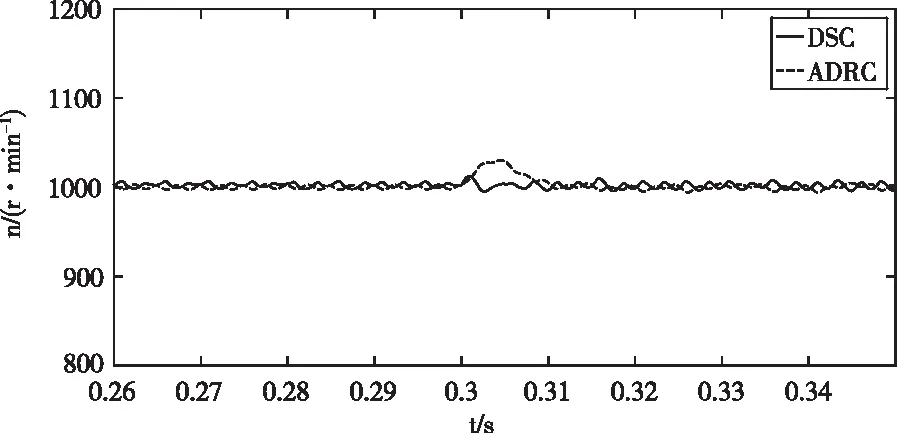
图4 t=0.3s时转矩降为0N·m响应曲线
4)转速n=1000r∕min,空载启动,t=0.2s时转矩升为10N·m,t=0.3s时转矩降为0N·m,仿真结果如图5所示。
比较DSC与ADRC控制器的动态性能。由图2可以看出,在转速n=1000r∕min,空载启动,全程无扰动的条件下,ADRC与DSC都具有较快的响应速度且超调较小,能较快的进入平稳运行状态。但与ADRC相比,DSC控制策略有更快的响应速度。比较DSC与ADRC控制器的抗扰动性能。由图3、4可以看出无论是空载起动后增加负载或者是带载起动后撤去负载,DSC控制策略都有更好的性能,在变载过程中,DSC控制的PMSM经受扰动后电机转速依然能够平稳运行,几乎无变化;而ADRC控制的PMSM在经受扰动后,转速有明显的突变,且恢复到稳态的时间更长;因此DSC控制策略有更好的鲁棒性。由图5(a)可以看出,DSC控制相较于ADRC控制,在变载时,转速突变由稳定转速的9.6%下降为2%,经扰动后转速恢复到稳态的时间由0.015s下降为0.002s,可见DSC控制策略有更好的鲁棒性且有更快的恢复时间。由图5(b)可见,本文设计的用于观测负载转矩的干扰观测器有很好的观测性能,收敛快,波动小,设计简单。由图5(c)(d)可见,从电机的iq响应曲线可以看出,DSC控制的PMSM在起动时有更快的响应速度,在应对负载突变时有更小的波动和更短的恢复时间。由此可见,本文所设计的DSC控制策略有更加优越的性能,针对负载扰动有更好的鲁棒性。
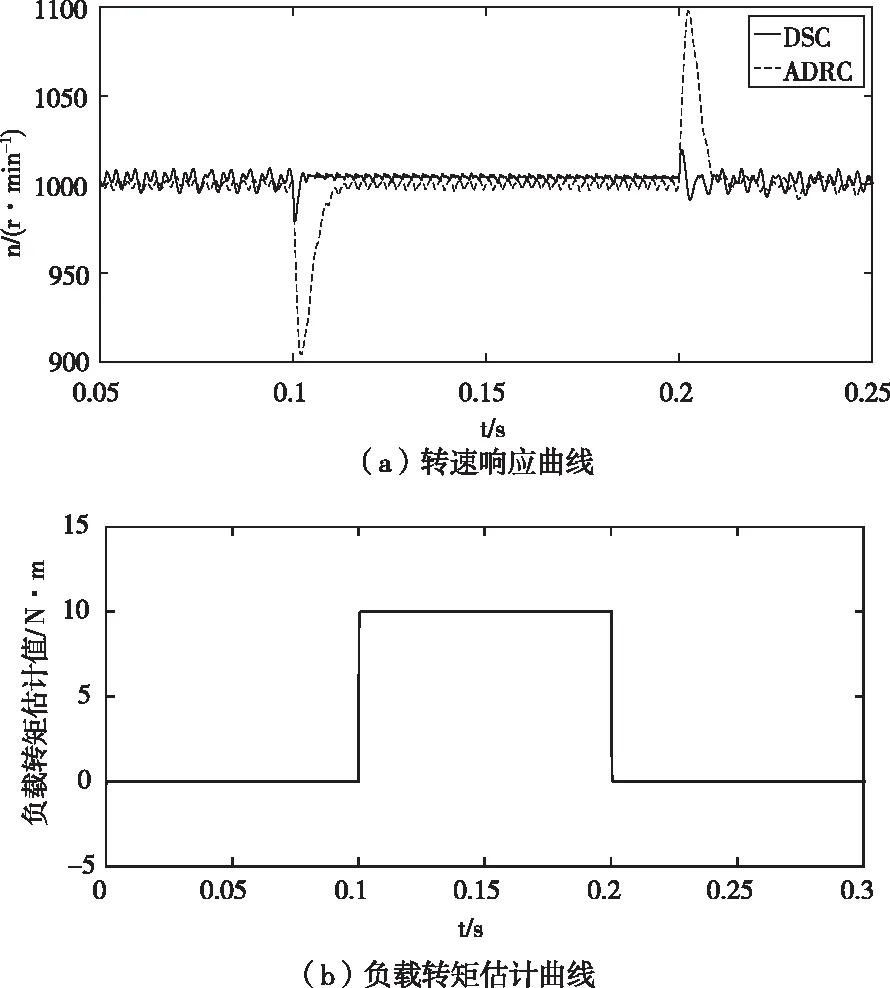
图5 转矩升降响应曲线
6 结论
本文针对永磁同步电机在运行过程中因负载变化,而使控制系统性能下降的的问题,提出了一种基于负载转矩反馈的永磁同步电机动态面控制策略。这种控制策略包括:定义一组新型的PMSM系统状态变量方程,并基于新型的PMSM系统状态变量方程设计了一种动态面滑模控制器,最后设计了一种指数收敛的干扰观测器。仿真表明,本文所设计的新型控制系统有效地提高了PMSM的控制性能,同时针对负载变化而引起的扰动有良好的鲁棒性。
猜你喜欢
微电机(2022年8期)2022-10-12
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
计算机与数字工程(2022年4期)2022-05-10
西部交通科技(2022年2期)2022-04-27
计算机测量与控制(2021年10期)2021-11-01
科技研究·理论版(2021年22期)2021-04-18
速读·上旬(2019年2期)2019-10-21
科技视界(2017年15期)2017-10-28
电脑知识与技术(2016年28期)2016-12-21