静电传感器结构参数与空间特性仿真分析
2021-11-17 08:37刘若晨孙见忠
计算机仿真 2021年6期
刘若晨,徐 成,孙见忠
(1. 江苏理工学院汽车与交通工程学院,江苏 常州,213001;2. 南京航空航天大学民航学院,江苏 南京,211106)
1 引言
基于静电感应原理而设计研制的静电监测技术,是一种能够有效应用于机电系统健康状态在线监测的新方法。利用静电传感器的高灵敏度直接监测产生摩擦磨损的区域和带电磨粒,能够更早的监测到早期故障的产生并实时反映系统的性能退化趋势[1-3]。
目前用于研究摩擦磨损在线监测的静电传感器主要有两类,分别是磨损区域传感器(wear-site sensor,WSS)[4-9]和润滑油路传感器(oil-line sensor,OLS)[10-16]。其中,文献[5]采用WSS对轴承钢的早期胶合故障进行了监测,文献[6-8]则采用WSS对滚动轴承进行监测并提供了静电信号去噪方法,文献[9]则是将WSS应用于轨道车辆齿轮箱的在线监测,分别得到轴承和齿轮磨损区域静电信号的变化趋势。文献[11-14]则采用OLS对滑油系统中产生的带电磨粒进行了监测与分析,文献[15-16]将OLS应用于风电齿轮箱的滑油系统进行了有效的监测,验证了OLS的适用性。但是上述研究大多是对某单一类型静电传感器应用于某个具体的摩擦磨损系统中时静电信号与监测效果间的关系,而对于两类静电传感器本身的结构和特性研究较少。仅文献[4]和文献[10]分别初步建立了适用于WSS和OLS的数学模型,并通过油滴实验对模型进行了验证。
为进一步明确所使用的两类静电传感器其物理结构尺寸和相互间性能特点,从而更好的指导传感器设计与应用,本文基于WSS和OLS的静电感应原理及传感器物理模型,围绕特征参数空间灵敏度分别进行仿真,得到不同尺寸下两类静电传感器对应的三维空间分布,进一步分析和比较了传感器理论效率与探极尺寸比间的相互关系。
2 静电感应原理与传感器结构
2.1 静电感应原理
在对运行中的机械设备进行静电在线监测时,WSS和OLS具有相同的静电感应原理,具体如图1所示。由于摩擦副的接触表面摩擦磨损会产生包括摩擦荷电、摩擦发射、表面荷电和磨粒荷电等一系列致电机理现象,从而产生可用于静电监测的静电感应中的施感电荷[4]。
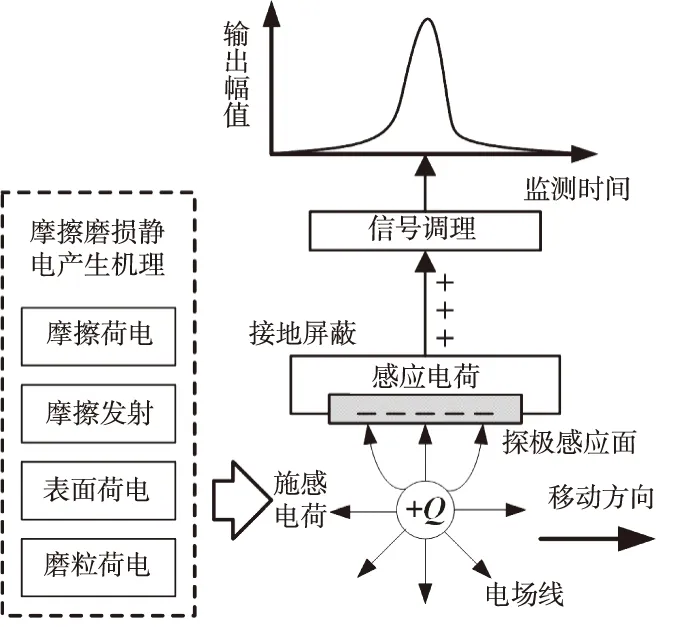
图1 静电感应原理
当施感电荷经过静电传感器探极前方有效区域内时,其电场线将终止于探极表面。由于静电感应作用,在探极表面吸引出相反极性电荷,则相同极性电荷被驱赶到探极表面的另一端,由于探极另一端连接信号调理电路,所以形成一个可测量的输出电荷信号。
2.2 静电传感器结构
由于监测对象的不同,WSS和OLS在系统中的安装位置及形状等也不相同,具体见表1。其中,WSS主要用于监测摩擦副的磨损情况,因而安装于靠近摩擦副的附近区域,结构为棒状,用于感应的探极表面则多为圆形平面[5]。而OLS主要用于监测系统摩擦产生的带电磨粒,因而安装于原理摩擦副的润滑系统主回路中,结构为环状,对应探极感应面也为环状[2]。由于两类传感器所使用的监测技术即静电感应原理相同,实际WSS和OLS的结构中都包括内侧探极感应层、中间绝缘层及外部屏蔽层等结构,如图2所示。

表1 静电传感器基本结构
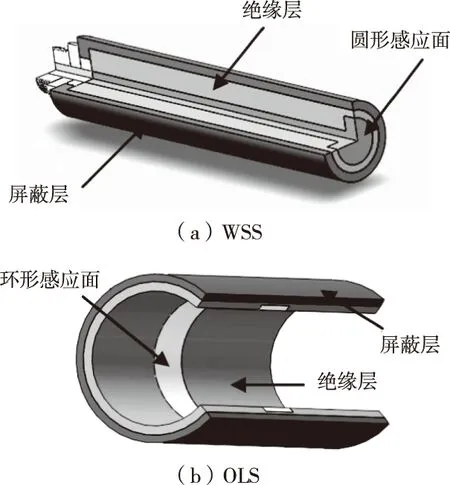
图2 静电传感器示意图
3 传感器数学模型
3.1 空间坐标系
根据静电传感器的基本结构并利用其对称性,在空间中分别建立适用于WSS和OLS的三维坐标系,如图3所示。其中,WSS的三维坐标系原点位于圆形探极感应面的圆心处,沿传感器探极的径向即探极感应面所在平面为XOY平面,沿传感器探极的轴向即垂直于感应面的方向为Z轴,向上为正。OLS的三维坐标系原点则位于环状探极的几何中心处,沿环形探极径向的中间截面为XOY平面,沿环形探极的轴向垂直于XOY平面的方向为Z轴。
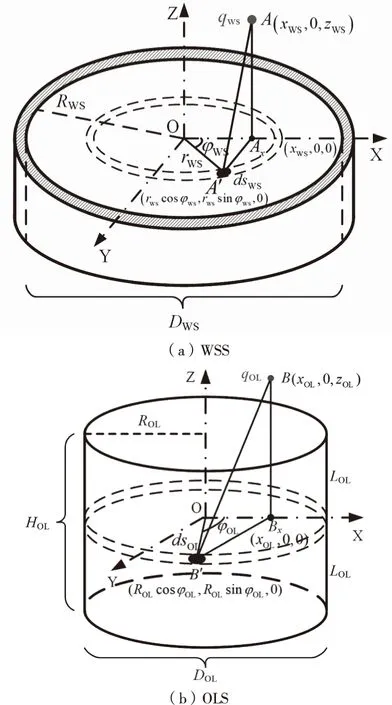
图3 空间三维坐标系
为了区分两个坐标系的空间坐标及模型参数,下述所有WSS中的参数变量均采用WS作为下标,而所有OLS中的参数变量均采用OL作为下标。根据静电感应原理,由于感应电荷只在感应面积聚,因而不考虑WSS和OLS的探极感应面厚度。对于WSS,最重要的探极尺寸参数为圆形感应面的直径DWS;而影响OLS的探极尺寸参数有两个,分别为环形探极长度HOL和直径DOL。考虑传感器探极的对称性及与坐标原点间的关系,所建模型中的RWS(圆形探极半径)、LOL和ROL(圆环探极半径)的数值分别为DWS、HOL和DOL的一半,即DWS=2RWS,HOL=2LOL,DOL=2ROL。
3.2 WSS数学模型
在图3(a)中,假设有一电荷量为qWS的施感点电荷位于探极周围空间区域的中XOZ平面内的任一点A,坐标为(xWS, 0,zWS)。则点A在XOY平面上的投影点Ax在X轴上,对应坐标为(xWS, 0, 0)。在圆形探极感应面上取一个微元感应区域dsWS,位于点A′,若该微元到坐标原点O的距离即OA′为rWS,OA′与OAx间的夹角为φWS, 则A′的坐标为(rWScosφWS,rWSsinφWS, 0)。根据静电感应原理,参考文献[4]通过库仑定律和高斯定理,可得到整个圆形探极感应面上的感应电荷QWS的计算表达式为

(1)
其中,zWS的取值大于0。通过上述式(1),结合传感器物理尺寸参数,可以仿真计算出WSS的特性参数及其变化规律,具体过程及仿真结果见下述第3节。另外,由于探极具有对称性,当施感电荷位于探极周围空间区域中的任一位置,均可将其等效转化到XOZ平面内进行计算,因此该公式中的坐标参数仅包括X和Z两个方向。
3.3 OLS数学模型
与WSS相类似,在图3(b)中,假设有一电荷量为qOL的施感点电荷位于探极周围空间区域的中XOZ平面内的任一点B,坐标为(xOL, 0,zWS)。则点B在XOY平面上的投影点Bx在X轴上,对应坐标为(xOL, 0, 0)。考虑以XOY平面为基准,在环形探极感应面上取一个微元感应区域dsOL,位于点B′,由于该微元到坐标原点O的距离即OB′等于环形探极感应面的半径ROL,若OA′与OAx间的夹角为φOL, 则B′的坐标为(ROLcosφOL,ROLsinφOL, 0)。根据静电感应原理,参考文献[10]通过库仑定律和高斯定理,同时考虑探极轴向和径向长度,可得到整个圆形探极感应面上的感应电荷QOL的计算表达式为

(2)
其中,xOL的取值范围为(-ROL,ROL)。通过上述式(2),结合传感器物理尺寸参数,可以仿真计算出OLS的特性参数及其变化规律。同样的,与WSS相类似,由于传感器探极具有对称性,当施感电荷位于探极周围空间区域中的任一位置,均可将其等效转化到XOZ平面内进行计算,因此该公式中的坐标参数也仅包括X和Z两个方向。
4 仿真结果与特性分析
4.1 空间灵敏度
空间灵敏度是反映静电传感器探极周围感应区域在空间上分布情况的重要特征参数[14]。根据定义,其数值等于当施感点电荷在静电传感器探极周围空间中某一位置时,所引起的传感器探极表面上感应电荷量的相反数与该施感电荷的电荷量的比值,用公式表达为
s(x,z)=-Q(x,z)/q
(3)
式中,s即为静电传感器空间灵敏度;q为施感点电荷所带电荷量;Q为探极表面产生的感应电荷量;x和z分别表示此时点电荷在探极的空间三维坐标系中所处径向和轴向的坐标。
WSS和OLS的感应电荷量Q可分别通过式(1)和式(2)计算得到。对于WSS,式(3)中的参数Q、q、x和z分别用加入下标WS的参数QWS、qWS、xWS和zWS进行替代。同样对于OLS,式(3)中的参数Q、q、x和z分别用加入下标OL的参数QOL、qOL、xOL和zOL进行替代。
结合式(1)、(2)和(3)可以发现,由于WSS和OLS的探极感应电荷量与施感电荷量均成正比,所以参数空间灵敏度大小仅与探极尺寸参数及所处空间位置相关,而与施感电荷所带电荷量无关,即施感电荷所带电量大小的不同不会影响空间灵敏度参数在空间的分布及其变化规律。此外,根据静电感应原理和电荷守恒定律,静电传感器探极上的感应电荷与施感电荷极性相反,而传感器的输出端电荷信号与施感电荷极性相同,所以通过式(3)可以保证无量纲的空间灵敏度参数值始终为正。
根据式(1)和(3)以及式(2)和(3)分别可以仿真得到WSS和OLS的空间灵敏度分布,具体分别如图4和图5所示。图4中所取WSS探极直径DWS为10mm,而图5中的OLS探极长度HOL和探极直径DOL均为20mm。图中,空间坐标x和z的单位也均为mm,且如无特殊说明,下述参数单位均为mm。
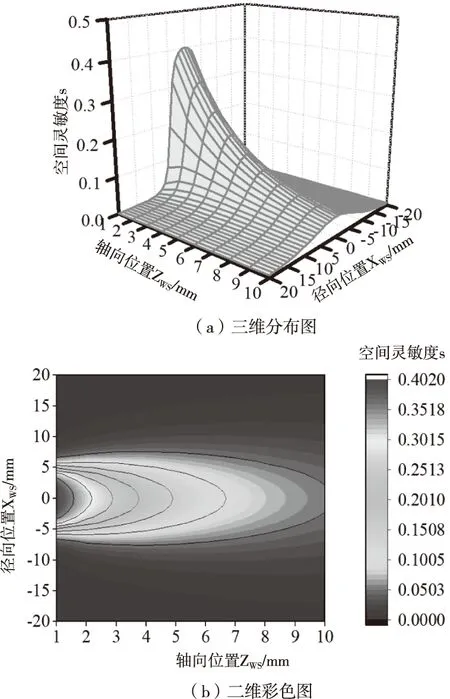
图4 DWS=10时WSS的空间灵敏度

图5 HOL和DOL=20时OLS的空间灵敏度
对比图4和图5可以看出,静电WSS和OLS的空间灵敏度在空间中具有不同的分布特点和变化规律,但都具有良好的对称性。其中,WSS沿直线xWS=0即所在空间坐标系中的Z轴对称;而OLS是关于xOL=0和zOL=0即所在空间坐标系中原点O的中心对称。这一特点与WSS和OLS自身的探极物理结构(圆形和环形)所具有的对称性相一致。因此,为了进一步简化研究对象,在下述针对不同探极尺寸传感器的研究过程中,仅截取第一象限即x>0且z>0部分进行分析,如图6和图7所示,其它象限的结果则均可通过对称方式得出。

图6 不同尺寸WSS的空间灵敏度
图6(a)、(b)和(c)分别对应WSS的探极直径DWS为10、5和20时空间灵敏度的仿真结果。由图6结果可知,WSS探极直径的改变会影响传感器空间灵敏度的具体数值,但不影响其在三维空间的分布规律,即不同探极尺寸的WSS其空间灵敏度在三维空间的分布具有相同的规律。这一主要特性规律是:在传感器探极感应面对应所在的区域内(xWS≤RWS),空间灵敏度s随径向位置xWS和轴向位置zWS的增大而减小,即越靠近探极感应面的中心点(坐标原点O处)空间灵敏度的值越大;同一轴向位置zWS对应的空间灵敏度在xWS=0处取得最大值。另外,当探极直径DWS增大即感应面面积增大时,同一坐标位置处的空间灵敏度值也增大。

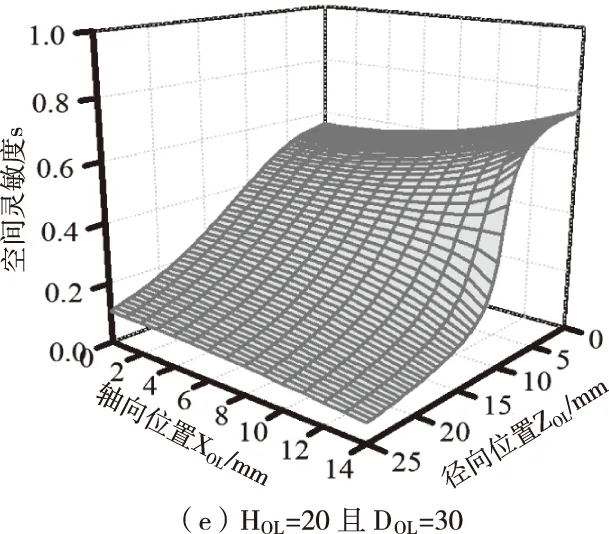
图7 不同尺寸OLS的空间灵敏度
图7是当OLS的探极长度HOL和探极直径DOL分别为20、10和30时空间灵敏度的仿真结果。由图7结果可知,与WSS相类似,OLS的探极长度和直径的改变会影响传感器空间灵敏度的具体数值,但不影响其在三维空间的分布规律,即不同探极尺寸的OLS其空间灵敏度在三维空间的分布具有相同的规律。但具体分布规律与WSS不同,OLS的主要特性规律是:在传感器探极感应面对应所在的区域内(zOL≤LOL),空间灵敏度s随径向位置xWS的减小和轴向位置zWS的增大而减小,即越靠近探极感应面的中心点xOL=ROL且zOL=0(而不是坐标原点O处)时空间灵敏度的值越大;同一径向位置xOL对应的空间灵敏度在zOL=0处取得最大值。另外,分别对比图7(a)、(b)、(c)和(a)、(d)、(e)可以发现,当探极长度HOL增大或探极直径DWS减小时,同一坐标位置处的空间灵敏度值也增大。
4.2 理论效率
传感器效率是衡量传感器检测能力的重要指标[10]。由于传感器空间灵敏度的值随空间位置的不同而不断变化,所以选取空间特殊固定位置处的空间灵敏度值来统一表征静电传感器的性能,这一定值即为传感器效率。用公式表达为
(4)
式中,η即为静电传感器理论效率;q为施感点电荷所带电荷量;Q为探极表面产生的感应电荷量;x0和z0分别为所选取空间特殊固定位置处在探极的空间三维坐标系中径向和轴向的坐标。需要特别说明的是,通过实验方法也可测得各实物静电传感器的效率值。为了与该仿真结果相区分,将仿真结果对应的传感器效率称为理论效率,而将实验结果对应的传感器效率称为工作效率。因此此处的传感器效率均为理论效率。
综合上述空间灵敏度仿真结果与传感器探极的物理结构特点,分别选取WSS和OLS探极感应区域内的特殊位置。OLS为探极的几何对称中心即坐标原点(0,0),而WSS为所监测的对应摩擦磨损区域即测点所在传感器三维空间中轴向位置处的坐标(0,ZWS)。
为了更清晰的表征静电传感器效率与探极尺寸间的相互关系,进一步引入探极尺寸比这一静电传感器结构参数。探极尺寸比λ是综合考虑传感器探极在径向和轴向这两个方向上尺寸影响的比例参数。对OLS来说λ为探极长度和探极直径的比值,即HOL/DOL(或LOL/ROL),简称长径比,每个完成加工的OLS对应的λ是一个定值。而对WSS来说,传感器加工完成后还需要考虑实际安装时测点与探极感应面间的相对位置,只有当传感器在设备上安装完成后才有对应的λ值,它由探极感应面的半径除以该距离得到,即RWS/ZWS,简称径距比。
根据文献[4]和文献[11]的研究结果,具有相同探极尺寸比λ的静电传感器,在上述所选取特殊位置处的空间灵敏度值也相同,即具有相同的传感器理论效率。而对于具有不同探极尺寸比的静电传感器,其理论效率与探极尺寸比间的相互关系即传感器理论效率曲线如图8所示。
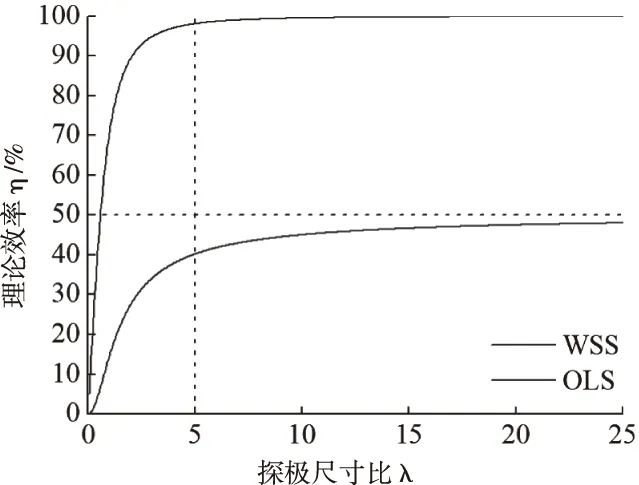
图8 静电传感器理论效率曲线
由图8可以看出,两条曲线具有相似的变化规律,即都随探极尺寸比λ的增大而增大,且在开始阶段尤其是λ<5时增长很快,而当λ>5后缓慢增长到最后趋近一定值,OLS趋近于100%,WSS则趋近于50%。考虑静电感应的基本原理,当施感电荷处于OLS的几何中心点时,随着λ的增大,其产生的电场线终止于探极感应面上的越多,当λ趋于无穷时,理论上所有的电场线都将终止于探极感应面上,探极上产生与施感电荷等量的感应电荷量,因而此时其效率为100%;而当WSS对应的λ增大时,施感电荷产生的电场线始终只有一侧能终止于静电传感器的探极感应面上,因此其效率最终为50%;这一结果与静电感应现象的基本原理相符合。
综上所述,静电传感器空间灵敏度参数值同时受探极尺寸和空间位置影响,WSS和OLS的空间灵敏度分布都具有对称性但分布规律不同。静电传感器理论效率参数值则仅与探极尺寸比相关,而不受空间位置变化的影响,同时WSS和OLS的理论效率曲线具有相似的变化规律,提升静电传感器的探极尺寸比能有效提高传感器的理论效率,对传感器设计与制造具有指导作用。
5 结论
1)针对用于摩擦磨损在线监测的静电传感器,分别根据其静电感应原理和应用场景,对比分析了典型的具有圆形棒状探极的WSS和圆环状探极的OLS的基本结构和特点。
2)根据所建数学模型,围绕空间灵敏度参数对WSS和OLS进行仿真,分别得到对应的典型三维空间灵敏度分布,结果表明两类静电传感器均具有良好的对称性,可进一步简化分析模型。
3)以单一象限区域为研究对象,对比分析不同探极尺寸参数下WSS和OLS空间灵敏度,结果表明两类传感器具有不同的分布规律,且传感器探极不同尺寸参数的变化均会影响其对应的空间灵敏度大小。
4)综合WSS和OLS的探极结构特点,以探极尺寸比为变量,研究施感电荷位于空间固定特殊位置处的静电传感器理论效率,分别得到其对应的理论效率曲线,两者变化规律相似,都随探极尺寸比的增大而增大,但WSS趋近于50%,而OLS趋近于100%。
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25
小作家报·教研博览(2022年11期)2022-04-02
小读者(2022年3期)2022-03-03
孩子(2020年11期)2020-11-17
新高考·高一物理(2016年7期)2017-01-23
科学大众·小诺贝尔(2016年11期)2017-01-10
科技视界(2016年17期)2016-07-15
科教导刊·电子版(2016年3期)2016-03-14
中国实用医药(2016年2期)2016-01-05
新高考·高一物理(2015年6期)2015-09-28