雷达情报质量评定方法研究∗
2021-11-11 14:23邢姗姗孟藏珍石晓宇邹立平
舰船电子工程 2021年10期
刘 浩 邢姗姗 孟藏珍 石晓宇 邹立平
(1.空军参谋部电子对抗局 北京 100032)(2.93209部队 北京 100085)(3.空军预警学院 武汉 430019)(4.93253部队 大连 116021)
1 引言
雷达情报质量评定[1~2]是雷达兵作战的重要组成部分,通过雷达情报质量评定,一是提高部队官兵对装备系统的综合运用能力,尽可能发挥装备的作战效能;二是调动广大官兵积极性,促进各级指挥人员充分发挥主观能力,认真研究雷达情报质量改进方法,更好为雷达情报保障出谋划策;三是查找各装备、各系统在情报保障过程中的不足,提出改进措施,为获取高效、优质的雷达情报质量提供依据。
随着雷达兵部队自动化系统的逐步提高,原有的人工对雷达情报质量评定已远远不能适用信息化发展的要求。同时新型武器系统不断装备部队,情报保障工作方式发生了变化。这要求对新形势下雷达情报质量评定进行深一步的研究。从满足雷达兵部队实际作战需要,集中体现雷达兵部队战斗力出发,开展以计算机为主体的通用雷达情报质量自动评定软件研制,实现雷达情报质量由人工管理向以自动评定为核心的计算机管理的转变,促进空情质量管理和雷达情报保障水平的提高。
2 雷达情报质量评定指标体系
根据相关规定中涉及的雷达情报评定标准,采取自顶向下、分类细化的方法,归纳总结出评定情报质量等级划分的三类九项可用于计算机描述的评估因素,主要包括及时性指标、连续性指标和完整性指标[3~5],如图1所示。

图1 雷达情报质量评定指标体系图
2.1 及时性指标
空情保障对雷达情报及时性的要求很严,滞后的信息不足以表现目标的真实状态。因此在考虑及时性指标时,重点对目标的及时发现、合理消失、及时上报等因素进行考虑。
2.2 连续性指标
雷达情报的连续性是对目标的动态掌握过程的表现。连续性差表明对目标不能完全掌握,无法提供目标的真实信息。连续性指标包括目标的报知速度、目标漏情时间、目标漏情距离、目标错情点数等。
2.3 完整性指标
完整性是指对探测目标信息的要素是否齐全。根据目前装备雷达的基本情况和下一步的发展趋势,完整性指标分为合格目标要素和优质目标要素。将目前雷达能报出的属性、机型架数、高度等信息列为合格要素,在此基础上提供目标的威胁等级、企图、国籍、活动区域等信息的要素列为优质目标要素。
2.4 准确性指标
准确性是指上报目标航迹的准确度。对于系统融合后的航迹,其准确性与数据链回传的目标航迹进行比对;对雷达上报的航迹,其准确性与系统融合后的航迹进行比对。根据上报的航迹与标准航迹的差值计算上报目标的准确性。
3 基于模糊综合评判的模型建立
3.1 评价参数和准则参数
根据雷达情报质量等级划分,定义评定参数集合为
V={V1,V2,V3,V4}
其中V1表示雷达情报质量评定为合格,V2表示雷达情报质量评定为不合格,V3表示雷达情报质量评定为一般错漏压情,V4表示雷达情报质量评定为严重错漏压情。
通过对评定指标的量化,定义准则参数集合为
U={U1,U2,…,Um}
其中Ui为准则参数,每一准则参数均是评价的“着眼点”。根据质量评定准则,量化雷达情报相应参数,确定雷达情报质量等级。
3.2 评价标称值
雷达情报质量的评定值按百分计算,根据部队实际经验,不同等级对应的评价标称值如表1。
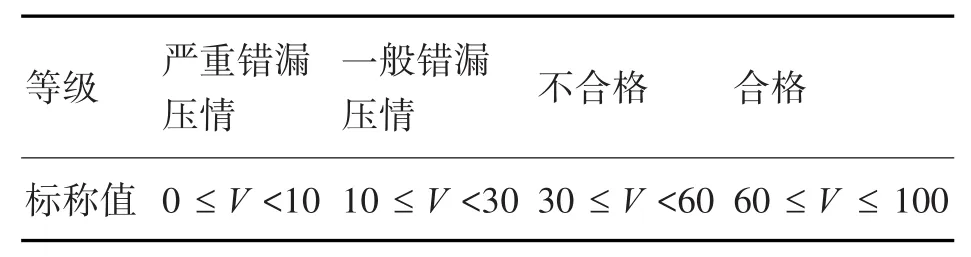
表1 雷达情报质量评定等级值
3.3 模型权重值的确定
在情报质量评定过程中,评定指标的权重根据不同的等级有不同的权重值,其确定采取专家打分[6~8],定性与定量相结合[9~11]的原则。
对所有指标因素作关于重要性的排序,记符合排序一致性原则的结果为

x(i)∈X(i=1,2,…,m)唯一对应于X中的某一个指标,m为指标个数。
基于上式,可得指标集X关于排序重要性的二元比较矩阵为
其中,βik为指标x(i)和x(k)关于排序重要作二元比较时,x(i)对 x(k)的重要性模糊标度值[12~13];0≤βik≤1,βik+βki=1;当i=k时,βik=0.5。
定义 βi,i+1(i=1,2,…m-1)为相邻指标相对重要性模糊标度值,即关于排序重要性作二元比较时指标x(i)相对于x(i+1)的重要性模糊标度值,其中0.5≤βi,i+1≤1。根据相邻指标的模糊标度值,利用上式可以计算出任何两个指标之间的重要性模糊标度值。

βi,i+1的值按如下方法确定:组织专家对x(i)和x(i+1)作关于威胁排序重要性的二元比较,给出x(i)对x(i+1)的相对重要性语气算子。按表2查出相应的模糊标度值即为 βi,i+1。

表2 语气算子与模糊标度的对应关系表
设各指标的权重向量为(a1,a1,…,a.m),可得:

3.4 质量评定数学建模
根据评定指标,建立雷达情报质量评定模型:

3.4.1 目标及时性评定模型
目标及时性评定模型包含目标的发现距离、消失距离、报知速度评定三部分,其模型如下:


1)目标发现、消失距离评定模型
在目标发现过程中,只有发现、消失距离符合雷达实际探测性能,此情报质量才为合格,故建立评定模型如下:

其中:RD为雷达探测距离;RT为雷达发现消失距离。
考虑到天气、兵器性能、地形等原因可能导致雷达探测距离有所变化,当雷达发现、消失距离与雷达探测距离在一定差距范围DV内时,认为对目标能够及时发现、合理消失。
2)目标报知速度评定模型
目标报知速度分为录取自动报出、人工用话报出和用报报出三种方式,内容包括从发现目标到测定报出第一点目标情报和第二点以后的目标情报速度,其评价模型如下:

其中:SV为目标报知速度,单位为s;SV为不同上报方式上报首次点约定的时间门限。
3.4.2 目标连续性评定模型
目标连续性评定模型包含目标的报知密度、漏情时间、漏情距离、错情点数评定四部分,其模型如下:


1)目标报知密度评定模型
根据雷达情报质量评定有关规定,综合考虑警戒、引导雷达以及情报处理系统对任务保障的具体要求,建立目标报知密度模型如下:

其中:P为每分钟上报的点数,PV为针对不同雷达(系统)对不同的目标、保障数量报知约定的点数。
2)目标漏情时间评定模型
目标上报间隔时间定义为

其中:TN表示当前时间;TL表示目标上报最近点的时间。
当目标上报间隔时间大于漏情时间约定值时,目标的漏情时间为
其中:TJ表示目标漏情时间约定值。
目标漏情时间的评定模型为

当目标上报间隔时间不大于漏情时间约定值时,T取值为0。
3)目标漏情距离评定模型
当有其他雷达探测监视到此目标条件下,目标漏情距离计算公式为

其中:N表示漏掉的点数,(xi,yi)表示漏掉点数的坐标。
在没有其他雷达掌握此目标条件下,根据目标最近点速度、航向和时间间隔,推算漏情距离计算公式为

其中:VL表示目标最近点时的速度,TI表示目标间隔时间。
目标漏情距离的度量模型为

其中:β为取值函数的曲率。
4)目标错情点数评定模型
根据情报质量管理有关规定,建立目标错情点数评定模型。

其中:WMV为目标错情点数评定值;P为错情点数占应当上报点数的比值;PCV为规定的错情率门限值,分为人工、自动方式上报方位距离和高度坐标四种情况。
3.4.3 要素完整性评定模型
对目标信息上报要素完整性评定,一方面考虑要素是否齐全,另一方面根据规定考虑目标身份误差的更正时间。针对所有要素信息建立评定通用模型如下。

其中:WZV为目标要素完整性评定值;YW为是否有此要素信息,有取值1,无取值0;t为要素信息误差更正时间,单位为分钟,上报正确取值为0。
3.4.4 目标准确性评定模型
上报目标的准确性以航迹误差为度量,取所有上报点航迹误差的均值作为目标准确性评定模型,评定模型如下:

其中:ZQV为目标航迹准确性评定值;β为取值函数的曲率;WCJ为上报目标坐标点误差均值,其计算公式为

其中:N为上报目标坐标点的总数;HWi为第i点坐标误差,其计算公式为

其中:(xS,yS)表示上报点的坐标。(xR,yR)表示标准点的坐标。
4 结语
雷达情报质量的评定根据作战需要可分为雷达情报质量实时监控和事后量化统计。通过实时雷达情报质量管理,随时了解本、下级指挥所和雷达站的空情保障动态,指导下级指挥所和雷达站提高雷达情报质量。根据事后统计评定,分析、评估雷达情报质量,督促部队有针对性地抓好情报工作,并以此为依据,评选优质雷达情报单位。
猜你喜欢
航空学报(2022年9期)2022-10-14
现代装饰(2022年5期)2022-10-13
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
现代装饰(2022年3期)2022-07-05
舰船科学技术(2022年10期)2022-06-17
现代装饰(2022年2期)2022-05-23
小学生导刊(低年级)(2016年11期)2016-11-14
数学大王·中高年级(2016年8期)2016-05-14
小天使·一年级语数英综合(2015年10期)2015-10-14