基于平方根双阶EKF的2D雷达与3D雷达误差配准方法∗
2021-11-11 14:23刘卫华黄高东董云龙
舰船电子工程 2021年10期
刘卫华 黄高东 董云龙
(1.海军航空大学 烟台 264001)(2.中国人民解放军31437部队 沈阳 110020)
1 引言
现部署雷达体制多样、维度各异,效能发挥上相对独立,较少融合协作。为有效利用已有不同体制雷达探测效用,对多部不同体制雷达进行组网,充分发挥各型雷达性能优势,是当前组网雷达研究的热点之一。多雷达组网系统能够对来自多部雷达的信息进行统一调配,克服单一雷达探测时的不确定性,显著提高单雷达系统的效能发挥[1]。但是,雷达本身设计以及复杂环境影响,导致雷达系统误差易发生积累,严重影响组网雷达效能发挥,因此在进行组网数据处理时,系统误差配准问题需引起重视。
当前组网雷达误差配准研究主要分为两种方式,即静态批处理方式[2~3]与实时处理方式[4~5],其研究的区别在于是否根据探测目标的行动变化进行实时处理,且当前研究主要针对同维度雷达进行。现实应用环境中,部署有大量两坐标雷达与三坐标雷达,单一雷达应用在效能发挥上难以达到理想效果,协同利用不同维度雷达组合配准[6~8],是保证配准效能,节省配准资源的重要研究环节。文献[6]即在异维雷达系统偏差配准中采用系统误差与目标状态向量相结合的技术,以达成Kalman滤波技术下的系统误差与目标向量同步更新,但没有深入考虑向量组合后的维数扩大问题,制约了运算速度与运算效率[9],制约了组网雷达效能的快速发挥。
为有效解决此问题,本文建立两部异坐标雷达探测模型,利用3D雷达的实时量测,对2D雷达的俯仰角进行实时估算。且引入平方根思想,提出一种防发散的双阶扩展平方根卡尔曼滤波协同误差配准方法,实现2D雷达与3D雷达系统误差的协同配准,且计算效率明显提高。
2 2D雷达与3D雷达空间配准系统模型与问题描述
此模型由A,B两部雷达组成,如图1所示,T为目标所在位置,其当前状态为(x,y,z)。A为3D雷达,其探测值为(r1,θ1,η1),系 统 偏 差 为(Δr1Δθ1Δη1);B为2D雷达,其探测值为 (r2,θ2),系统偏差为 (Δr2Δθ2)。

图1 2D雷达与3D雷达探测模型



其中:

利用EKF技术对此联合扩维向量进行实时滤波估计,且为解决扩维与运算效率之间的矛盾问题,本文首先利用文献[10]提出的双阶Kalman思想,对联合扩维滤波进行解耦。
3 双阶扩展卡尔曼滤波误差配准方法
将扩维向量分解为目标状态向量和系统偏差向量,相应模型为

其中,Q(k)为零均值高斯白噪声的协方差矩阵。
其量测方程为

其滤波结构如图2所示。

图2 双阶EKF结构模型
3.1 忽略系统偏差滤波

相对应的新息协方差表示为

系统增益表示为

对目标状态向量、目标状态协方差矩阵进行更新,得到:
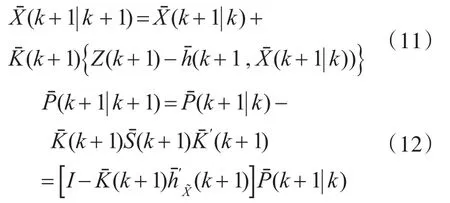
其中:
3.2 系统偏差滤波
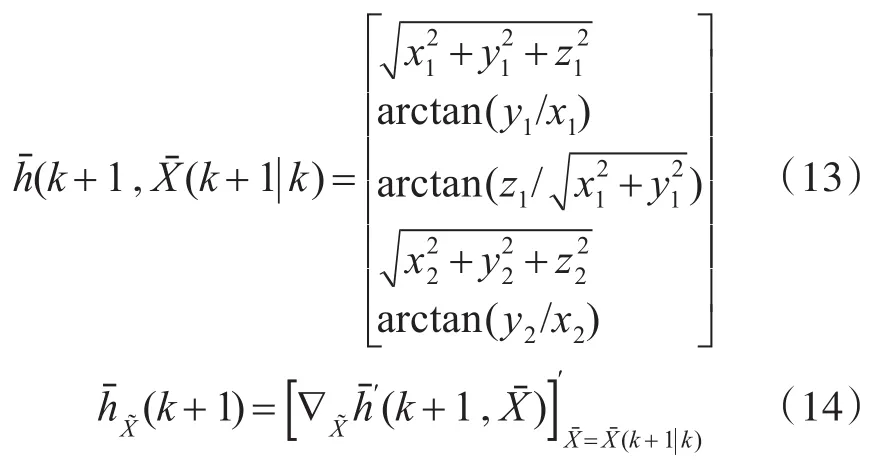
在进行系统偏差滤波时,首先设系统偏差为b(k),根据文献[10~11],对系统偏差进行滤波,其滤波结构如下。
式中I与C(k)均为6×6的单位阵。
3.3 融合滤波
根据双阶卡尔曼滤波结构,对忽略系统偏差系统与系统偏差分别进行滤波后再融合,即可达到扩维滤波的效果。其中,融合后的目标状态估计及其协方差矩阵如下:

4 改进的平方根滤波
单纯的双阶卡尔曼滤波技术在数值计算时易产生滤波发散问题,这是由于计算机数值位数限制造成的。在双阶滤波过程中,无偏滤波会因为此限制不断积累舍入误差,严重时导致状态均方差阵P(k|k)和 P(k+1|k)失去正定型,与此同时,增益K(k)会发生失真,进而最终导致滤波结果发散。为减少数值位数,达到降低计算误差的目的,本节引入平方根滤波[12]思想,滤波过程中不直接更新状态均方差阵,而是对其平方根进行更新,使P(k|k)和P(k+1|k)保持正定。
此时,给出 Δ(k|k)Δ(k+1|k),Δ(k+1|k+1),其分别为均方差阵 P(k|k),P(k+1|k),P(k+1|k+1)的平方根,即
将式(27)代入无偏差滤波的均方差阵,即得

由 Δ′(k|k)A′(k)的可逆性,得出矩阵D为列满秩,之后,利用QR数学分解原理,即可计算得出Δ′(k+1|k)。
由以上公式推导,得到应用平方根滤波进行无偏滤波的流程为
令 ρ满足

同理,应用QR分解得到平方根矩阵Δ(k+1)为

最终滤波模型如图3所示。
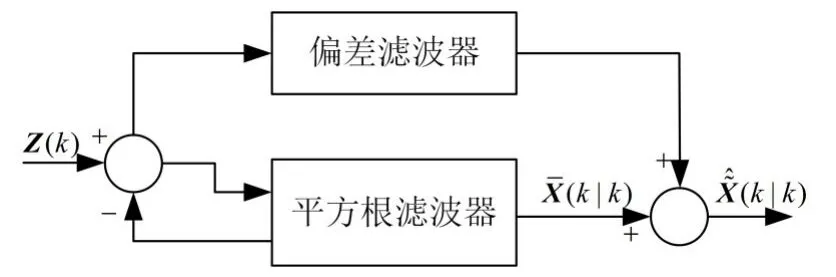
图3 双阶平方根滤波器结构
5 仿真与结论
假设现对两部异维度探测雷达进行误差配准,其中设定3D探测雷达的系统偏差为Δr1=2000m,Δθ1=0.0087rad,Δη1=0.0175rad2D探测雷达的系统偏差为Δr2=1500m,Δθ2=0.0047rad。以雷达1的本地直角坐标系生成用于配准的航迹,为

设定迭代步数为3000。
图4、图5是本文所提平方根双阶EKF配准方法与文献[6]传统扩维算法在距离系统误差配准方面的对比结果,可以看出,本文方法一方面能够实施有效配准,配准精度提高,另一方面,收敛速度明显快于文献[6]算法,且较好地解决了传统扩维算法由于状态协方差非正定导致的发散问题。

图4 A雷达本文算法与文献[6]算法距离系统偏差配准对比
图5、图6是本文所提平方根双阶EKF配准方法与文献[6]传统扩维算法在方位系统误差配准方面的对比结果,可以看出,本文方法配准精度提升较为明显,收敛速度明显快于文献[6]算法,未出现发散问题。

图5 B雷达本文算法与文献[6]算法距离系统偏差配准对比
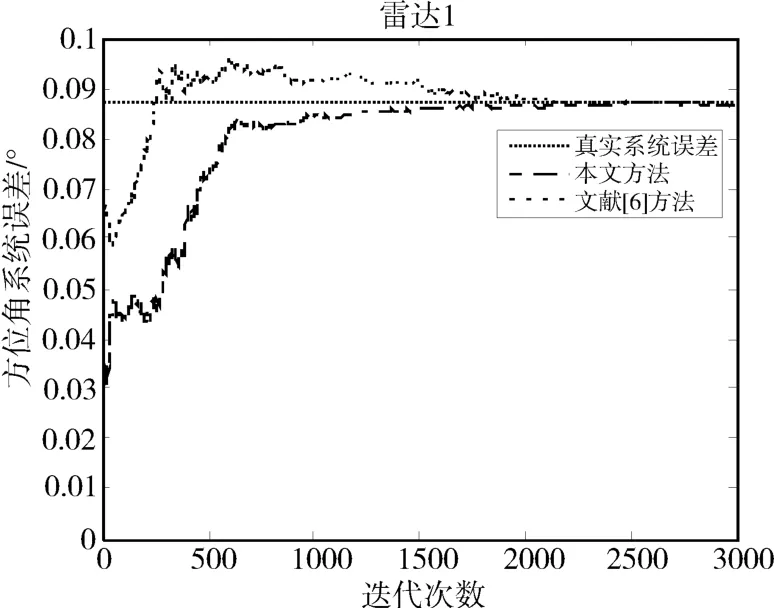
图6 A雷达本文算法与文献[6]算法方位系统偏差配准对比
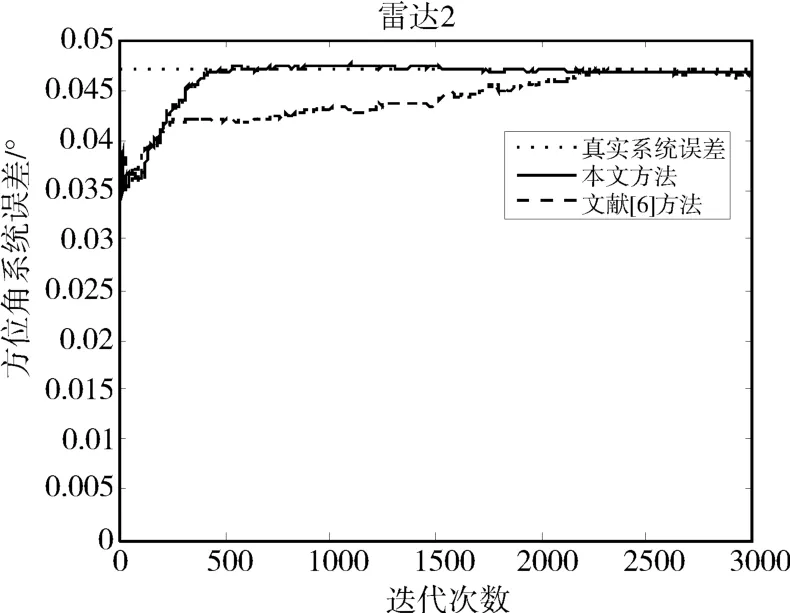
图7 B雷达本文算法与文献[6]算法方位系统偏差配准对比
图8为利用3D雷达与2D雷达的融合估计得到的俯仰角方向的系统偏差,可以看出,本文算法的精度较文献[6]算法精度有一定的提升,估计结果较好。

图8 B雷达本文算法与文献[6]算法俯仰系统偏差配准对比
6 结语
为有效利用不同维度雷达探测效用,本文对不同维度雷达组网中联合扩维配准问题进行了研究与改进。分析了传统扩维误差配准算法两方面的问题,一是状态扩维与运算效率低下之间的矛盾问题;二是无偏滤波过程中状态协方差非正定导致的发散问题。在此基础上,引入平方根思想与双阶解耦思想,提出了一种基于平方根双阶EKF的系统偏差配准方法。通过仿真分析,验证了本文所提算法性能上的有效性。
猜你喜欢
中学生数理化·七年级数学人教版(2020年3期)2020-08-10
初中生世界·八年级(2020年12期)2020-03-10
黑龙江教育·中学(2018年1期)2018-04-02
数学学习与研究(2018年3期)2018-03-14
中学生理科应试(2017年2期)2017-04-01
考试周刊(2016年54期)2016-07-18
现代电子技术(2015年10期)2015-05-29
中学生数理化·七年级数学人教版(2014年2期)2014-06-20
中学生数理化·八年级数学北师大版(2008年7期)2008-10-15