一种激光捷联惯导高精度实时测姿方法研究
2021-11-08 02:54白焕旭高志勇
兵器装备工程学报 2021年10期
王 瑾,刘 冰,王 盛,白焕旭,高志勇,曾 凡
(1.北京航天发射技术研究所,北京 100076;2.中国人民解放军93160部队,北京 100076)
1 引言
激光捷联惯导(以下简称“惯导”)是广泛应用于火箭、导弹、船舶等上的定向测姿设备,具备自主性高、隐蔽性高、不受外界信息干扰等优点[1]。以往惯导大多工作在准静态环境下,对实时性要求低。本文惯导应用于雷达阵面上,雷达需要对运动目标的位置、速度进行测量并自动跟踪,对惯导的实时性有较高要求。实现高实时性,需要解决传统惯导姿态测量与载体真实位置存在延时、无法保证姿态与UTC时间对齐等问题,目前已成为惯导的发展趋势之一。本文对动态环境下惯导高精度实时姿态测量问题进行研究。
影响惯导定向测姿实时性的因素有很多,包括陀螺测量带宽、读取电路的处理速度、数字信号滤波处理、数据解算速度、同步脉冲与姿态更新的动态时间差等,其中主要因素是滤波处理延时[2]、脉冲与姿态的同步时间差。晁志超[3]研究了自适应陷波器和低阶FIR低通滤波器的串联滤波结构在激光陀螺抖动解调上的应用,解决了高阶FIR滤波器延时大的问题;徐智勇等人[4-6]采用最小二乘拟合函数法,在运动目标位置和速度预测中进行了仿真分析;吴赛成等[7]采用Kalman滤波器对姿态角进行观测,估计出角速度和角加速度,利用二阶运动模型对姿态进行跟踪预测,但无法适用于载体变加速运动的情况;袁胜智等人在不同的应用背景下提出了跟踪预测的建模及滤波算法,如Kalman-mean shift[8]、粒子滤波[9-12],但是模型复杂,预测算法本身的实时性难以保证。综上所述,已有文献对基于最小二乘的多项式拟合方法、Kalman滤波器在位置姿态预测上的研究,多停留在仿真层面,对目标姿态跟踪预测、姿态与UTC时间对齐、伴随同步脉冲沿输出的应用研究不多。
本文从以下3个方面展开研究。首先,采用复合滤波器同时实现对准精度高和导航姿态延时小的需求;其次,通过FPGA精确测量同步脉冲与姿态更新时刻的动态时间差;最后,通过Kalman滤波器对姿态角进行观测,估计出角速度和角加速度,并通过最小二乘法对其拟合,对滤波固有延时和同步时间差所导致的动态姿态测量误差进行实时跟踪预测。通过Matlab半实物仿真试验验证跟踪预测算法的有效性,并在高精度双轴转台上进行实物验证。
2 实时测姿技术
实时测姿技术从复合滤波技术、姿态同步输出技术、姿态跟踪预测技术等3个部分展开:
1)复合滤波技术从传感器数据处理上有效地减小惯导姿态延时,降低姿态跟踪预测的理论误差,为实时姿态预测奠定基础;
2)姿态同步输出技术主要介绍惯导姿态的同步输出机制、姿态延时的计算方法及测量试验,为姿态跟踪预测提供必需的时间差数据;
3)姿态跟踪预测技术是利用姿态延时对惯导解算的姿态进行跟踪预测,是获取实时姿态数据的核心技术。
以上3部分共同实现了实时姿态输出功能。
2.1 复合滤波技术
目前,惯导大多采用单一的高阶滤波器实现高精度对准,存在姿态测量延时大的问题[13],为了同时实现高精度对准和导航姿态延时小的目标,本文采用复合滤波器方案,对准过程中使用180阶FIR低通滤波器,转入导航后切换为IIR陷波器+40阶FIR低通滤波器,由于IIR陷波器几乎不引入相位延迟,FIR数字滤波器具有线性相位延迟特性[14]:
(1)
式(1)中:T为滤波器相位滞后引入的时间延迟;N为滤波器阶数;Fs为采样频率5 kHz。因此采用复合滤波器时,导航姿态滞后运动载体的固有时间由18 ms缩减为4 ms。
2.2 姿态同步输出技术
由于载体处于运动状态,系统需要通过同步机制将载体运动与惯导姿态输出关联起来。同步方式可以是惯导自起同步脉冲方式或接收外同步脉冲方式:① 自起同步脉冲方式,惯导主动将实时姿态数据伴随同步脉冲输出到外部接口,外部通过同步脉冲实现载体位置与惯导姿态关联;② 接收外同步脉冲方式,惯导被动接收外部同步脉冲,即时返回实时姿态数据。下文以外同步脉冲方式为例说明惯导姿态同步输出机制。
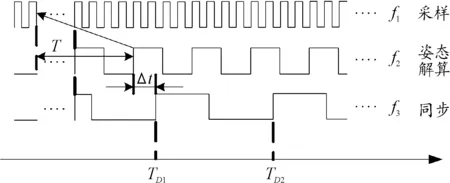
图1 姿态同步输出原理示意图
如有卫星设备,惯导第一次对时成功后,利用本地高品质晶振进行微秒级守时,并利用卫星设备对UTC时间实时进行校准;当接收到外同步脉冲时,将UTC时间和实时姿态数据输出到外部接口,从而实现了输出外同步脉冲沿时刻TD1,TD2,…的姿态角及UTC时间。
2.3 姿态跟踪预测技术
2.3.1应用Kalman滤波器估计载体运动状态
(2)

Z(t)=HX(t)+V(t)
(3)
对式(2)和式(3)进行离散化,得到:
(4)
设离散步长为τ,则式(4)中Φk可写作:

状态一步预测为:
Xk+1,k=Φk+1,kXk
(5)
一步预测均方估计为:
(6)
滤波增益为:
(7)
状态最佳估计为:
Xk+1=Xk+1,k+Kk+1(Zk+1-Hk+1Xk+1,k)
(8)
估计误差的方差为:
Pk+1=Pk+1,k-Kk+1Hk+1Pk+1,k
(9)
2.3.2应用最小二乘法进行运动状态预测
考虑到雷达阵面的动态范围是角速度不大于15(°)/s、角加速度不大于10(°)/s2,以及跟踪预测算法本身的实时性,采用当前k时刻最新估计的3对角速度、角加速度数据序列(xk-2,yk-2),(xk-1,yk-1),(xk,yk)作2阶多项式拟合,即:
f(x)=a0+a1·x+a2·x2
(10)
多项式拟合的目标函数为:
(11)

a=(XTX)-1XTY
(12)
根据估计数据的动态增长,预测的数据序列(xk-2,yk-2),(xk-1,yk-1),(xk,yk)以固定的长度在历史数据序列中进行滑动,系数a随之动态变化,再通过式(10)计算未来某一时刻的角速度和角加速度。以延迟时间Tdelay=T+Δtnτ+Δt为例,基于k时刻的观测值角运动状态估计值ωk,αk,ωk+1,αk+1,…,ωk+n,αk+n,预测k时刻的真实姿态为:
(13)
实时姿态同步输出原理框图如图2。
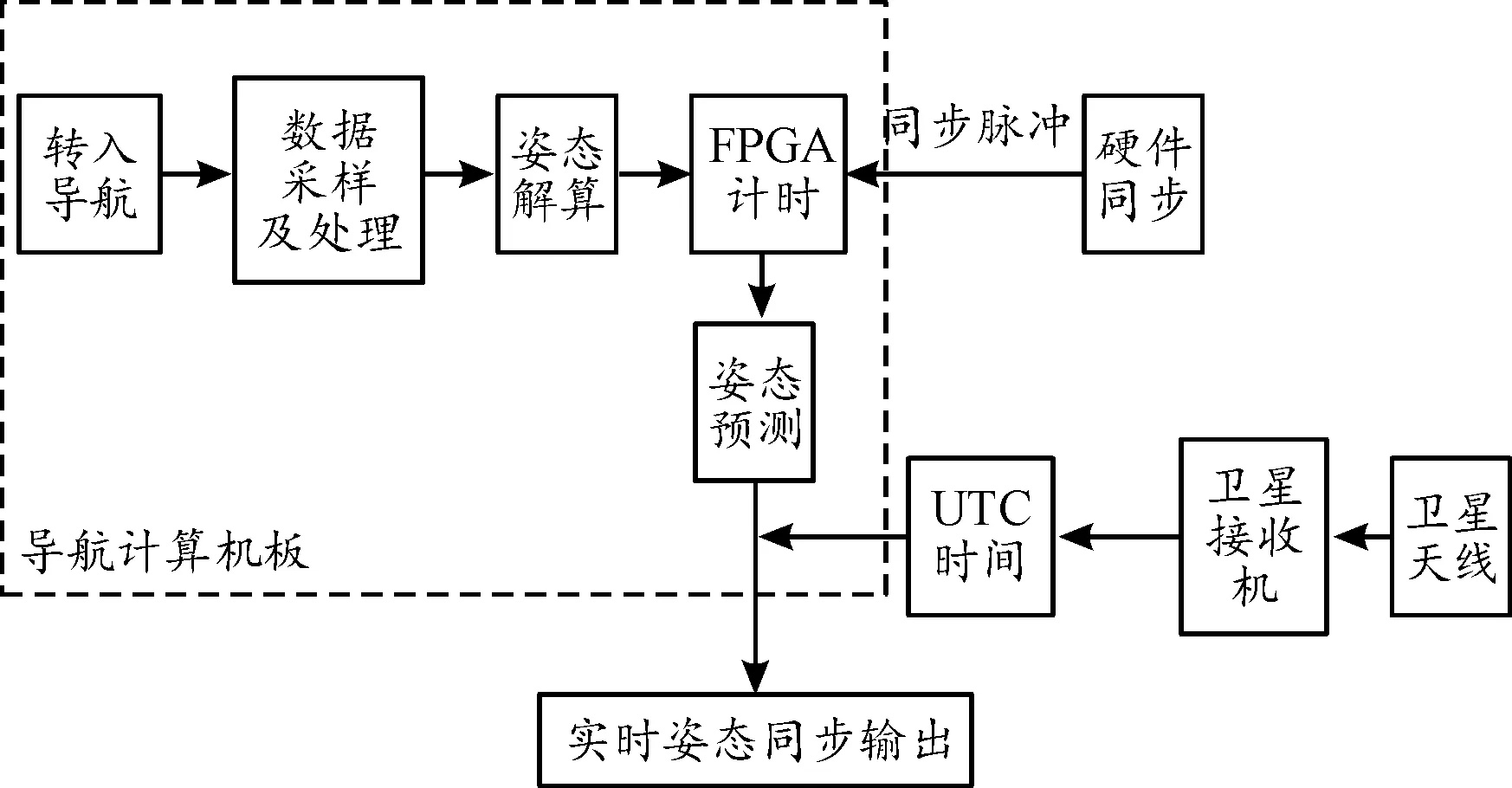
图2 实时姿态同步输出原理框图
3 半实物仿真试验
3.1 姿态延时测量
将惯导安装于高精度双轴转台(测角精度优于2″)上,如图3所示。惯导完成初始对准后开始进行姿态测量,控制转台匀速运动,利用惯导和转台的外同步功能,同时采集惯导姿态和转台位置数据,计算转台与惯导处于同一姿态角时的时间差。如图4所示,惯导的航向数据比转台的测角数据滞后了4.4 ms,其中包含滤波器固定延时4 ms、惯导同步误差以及转台同步误差等。

图3 高精度双轴转台图
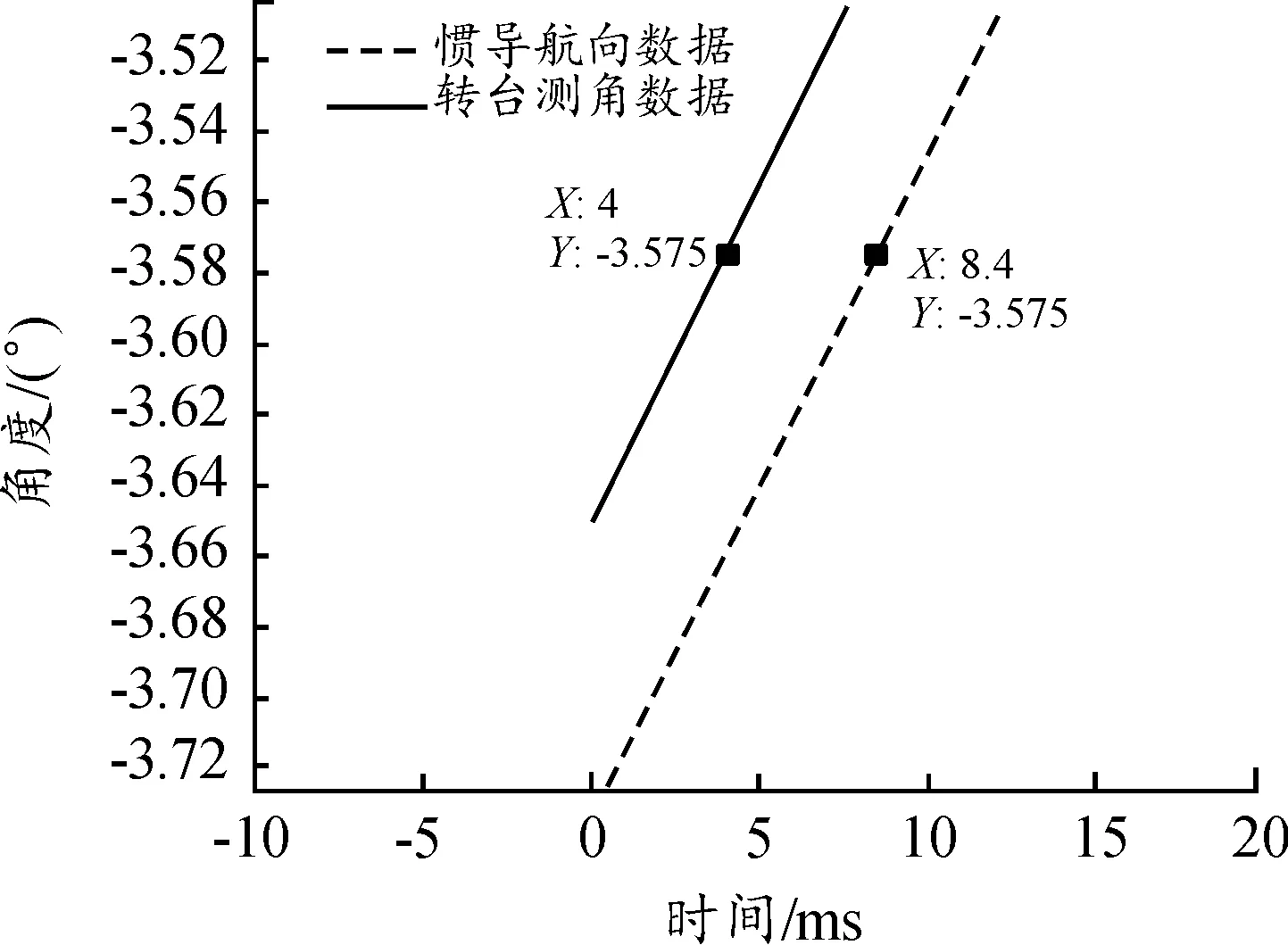
图4 惯导数据与转台数据曲线
3.2 姿态跟踪预测
为了验证姿态跟踪预测算法的精度,开展了半实物仿真试验。通过高精度转台依次按照如下运动状态转动,采集惯导姿态数据,利用运动跟踪预测算法预测4 ms之后的姿态数据,并以4 ms之后的惯导实际数据为基准,对比预测前后的姿态误差。
1)转台匀速运动下的姿态预测结果
转台分别按照5(°)/s、10(°)/s、15(°)/s、20(°)/s的角速度匀速转动,预测前后的航向误差如图5所示。
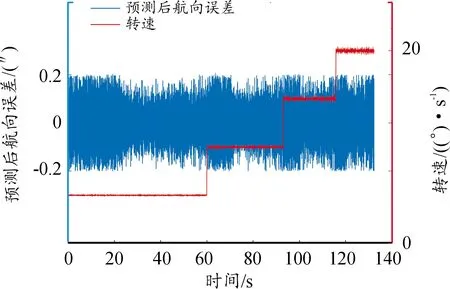
图5 转台匀速运动下惯导预测前后航向误差曲线
从图5可以看出,如不进行跟踪预测,姿态延迟与载体转速成正比,转速每提高5(°)/s,延时4 ms的姿态误差增加约5(°)/s×4 ms=72″;当采用跟踪预测方法补偿这4 ms延时后,姿态误差随转速线性增加的现象明显改善,且姿态预测误差不超过0.3″。
2)转台匀加速运动下的姿态预测结果
转台从静止到固定转速15(°)/s过程中,分别按照5(°)/s2、10(°)/s2、15(°)/s2、20(°)/s2的机动条件匀加速启动,预测前后的航向误差如图6所示。
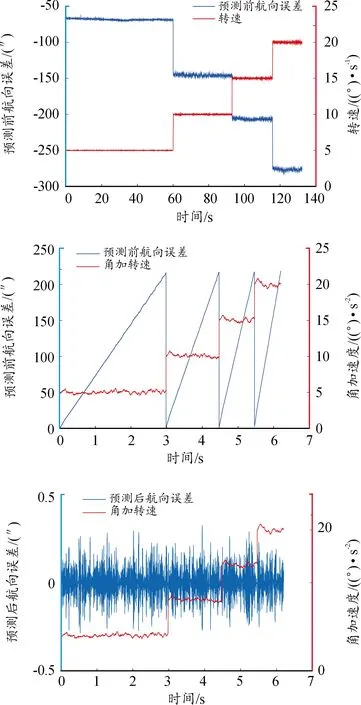
图6 转台匀加速运动下惯导预测前后航向误差曲线
从预测前的航向误差可以看出,角加速度每增加5(°)/s2,延时4 ms的航向误差变化速率增加5(°)/s2×4 ms=72(″)/s,与实测一致;当采用跟踪预测技术后,载体的机动状态对航向误差基本没有影响,姿态误差不超过0.4″。
3)转台摇摆运动下的姿态预测结果
转台摇摆幅值10°固定不变,分别按照0.1 Hz、0.4 Hz、0.8 Hz、1 Hz的频率进行运动,预测前后的航向误差如图7所示。
如图7所示,当载体处于摇摆运动时,其一直处于机动状态,机动强度与摇摆幅值和频率成正比,由于角速度随时间呈现正弦变化,延时4 ms的姿态误差也随时间成正弦变化,且姿态误差的幅值随载体机动强度增加而增大,最大误差达到900″;当采用跟踪预测后,姿态误差补偿效果明显,最大不超过1″。
以上半实物仿真试验分别从载体匀速运动、匀加速运动、变加速运动等3种工况下验证了姿态跟踪预测技术的有效性。姿态测量误差的根源在于时间延迟,只要对延时进行有效测量,通过跟踪预测技术便可以对姿态测量误差进行补偿,从而实现运动载体惯导实时姿态输出。
4 试验
在导航计算机板DSP程序中实现姿态跟踪预测算法,同样利用高精度双轴转台,按照3.2节的运动状态进行在线试验,结果如图8~图10所示。
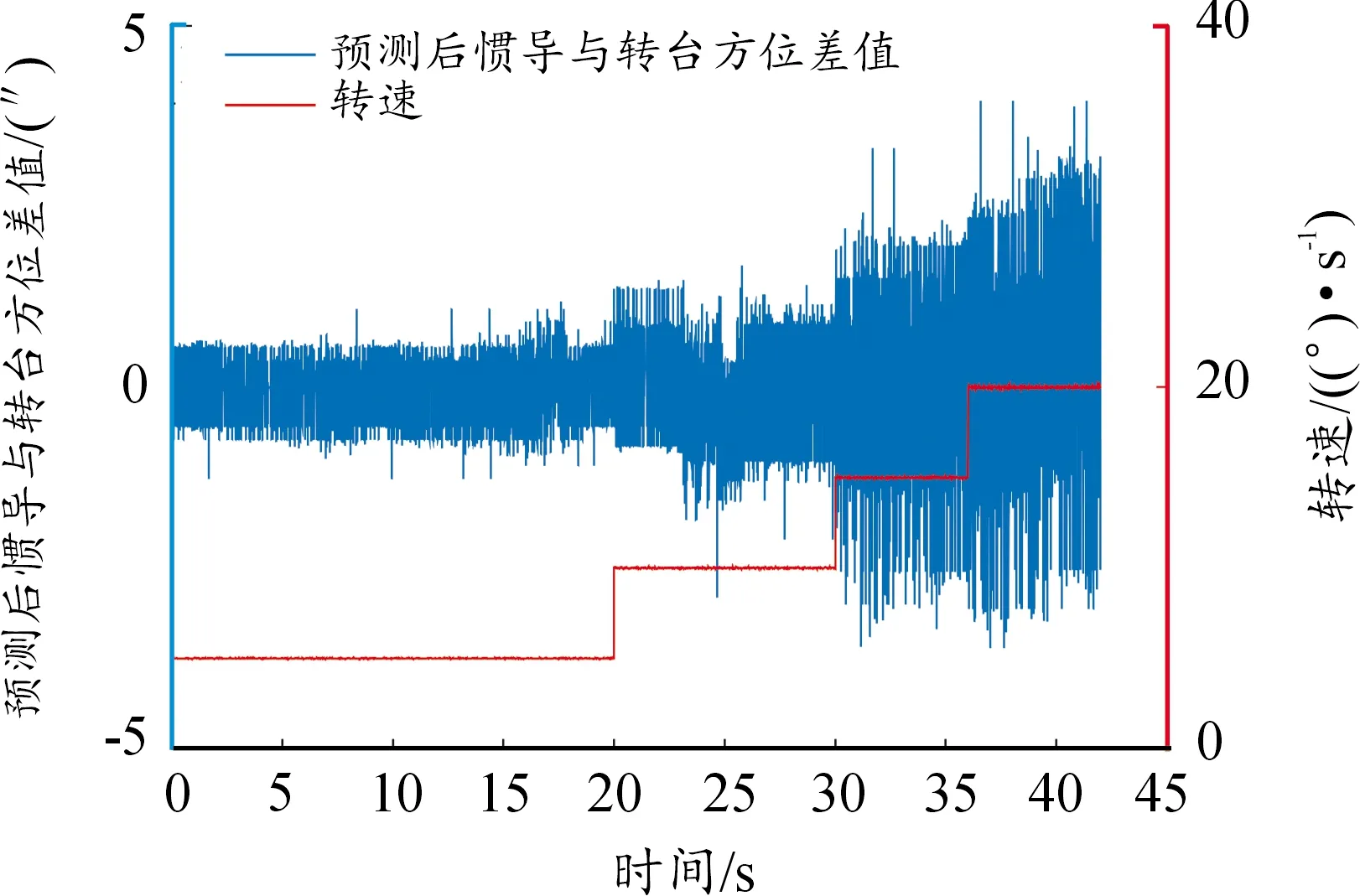
图8 转台匀速运动下惯导航向实时误差角曲线
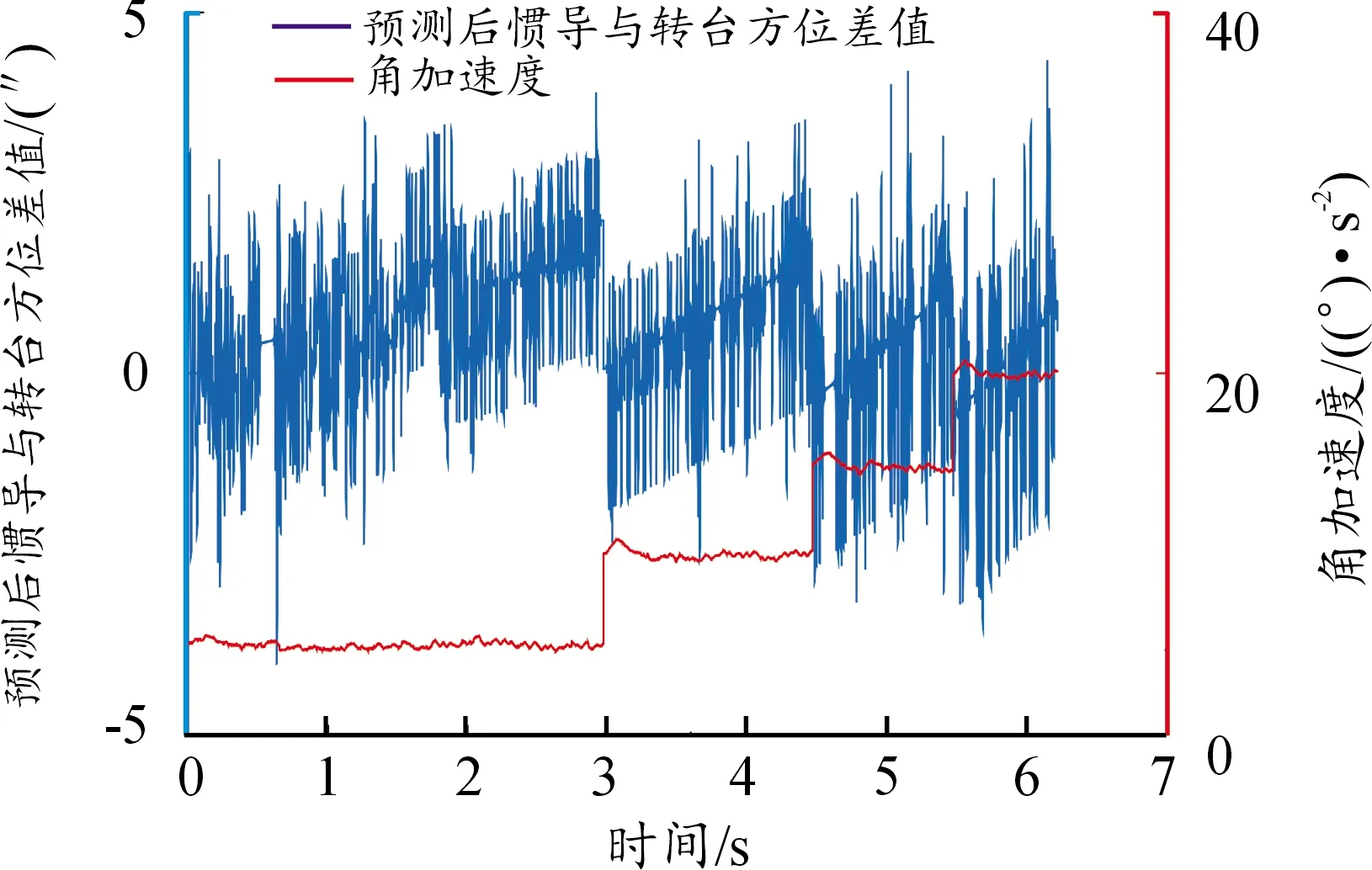
图9 转台匀加速运动下惯导航向实时误差角曲线
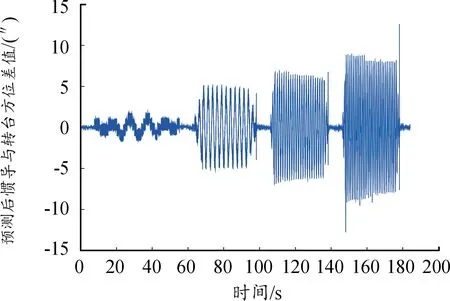
图10 转台摇摆运动下惯导航向实时误差角曲线
从图8可以看出,当转台匀速转动时,惯导实时姿态误差不大于5″,且转台转速每增加5(°)/s,姿态误差增加约0.7″,等效于39 μs的延时误差;图9说明当转台启动时,近似为匀加速运动,惯导实时姿态误差基本没有受到载体加速影响,误差不大于5″;图10说明惯导实时姿态误差随摇摆机动强度增加而增大,最大不超过15″。
以上试验分别从载体匀速运动、匀加速运动、变加速运动等3种工况下验证了姿态跟踪预测技术的有效性,且结果包含了转台测角误差与同步误差,表明姿态跟踪预测技术能够有效地补偿时间延迟导致的姿态测量误差,实现惯导测姿的高实时性,对提高动态载体的姿态测量精度具有较高的实用价值。
将惯导姿态误差在跟踪预测前、半实物仿真实验及试验结果汇总如表1所示。
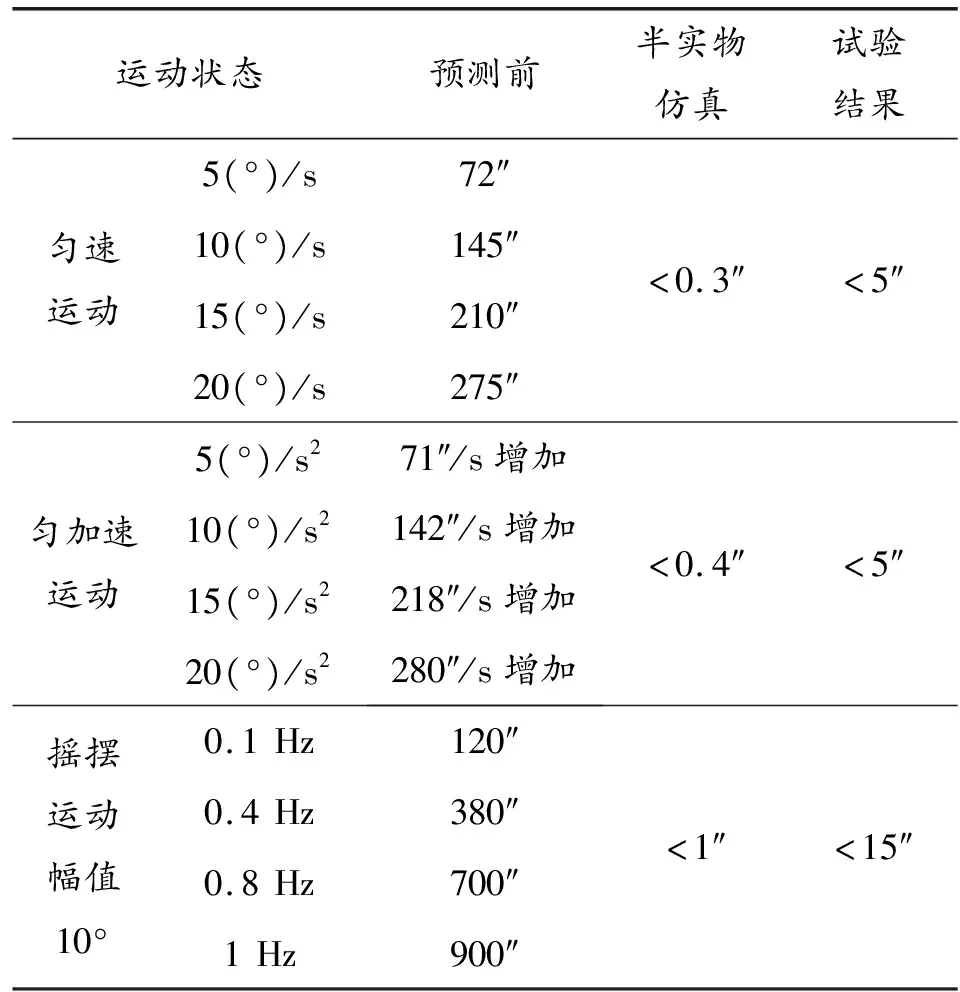
表1 惯导预测前后姿态误差
5 结论
本文针对应用于雷达天线阵面上的激光捷联惯导,采用复合滤波技术、姿态同步输出技术、姿态跟踪预测技术实现实时高精度姿态测量。仿真和试验结果表明,该方法能够有效地补偿滤波器相位滞后和同步时间差导致的姿态测量误差,已应用于某型号雷达跟踪识别试验系统中,导航姿态与载体位置相差15″以内,实时姿态测量效果良好。
猜你喜欢
客联(2022年4期)2022-07-06
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2022年2期)2022-06-14
快乐作文(1.2年级)(2022年5期)2022-05-31
导航定位与授时(2022年1期)2022-02-18
三悦文摘·教育学刊(2021年52期)2021-04-27
数字海洋与水下攻防(2020年5期)2021-01-04
装备环境工程(2020年3期)2020-04-03
软件导刊(2016年7期)2016-05-14
对联(2015年22期)2015-06-11