食饵具有非线性收获率的捕食系统的稳定性
2021-11-05 05:08冯倩,张睿
内江师范学院学报 2021年10期
冯 倩, 张 睿
(兰州交通大学 数理学院, 甘肃 兰州 730070)
0 引言
十九世纪二十年代,美国生态学家Lotka[1]和意大利数学家Volterra[2]提出了捕食者-食饵模型(Lotka-Volterra模型),其形式为:
(1)
其中,x(t)和y(t)表示食饵和捕食者的种群密度,a表示食饵的内禀增长率,b表示捕食者掠食食饵的能力,c表示食饵对捕食者的供养能力,k表示捕食者的死亡率.
此后,国内外许多学者对系统(1)进行改进并作出了更加广泛的研究,其中收获率是影响种群系统的一个重要因素,学者们不但要考虑如何使生物资源尽可能大的满足人类生活需求,还要考虑怎么让生物种群保持可持续发展.因此,对具有收获率的捕食系统的研究是极其重要的.1981年Brauer等[3]研究了一类带有常数收获率的捕食者-食饵模型,讨论了平衡点和极限环的存在性.1986年,梁肇军[4]讨论了食饵种群具有常数收获率的Volterra模型:
(2)
其中,a10表示食饵的内禀增长率,a12表示捕食者掠食食饵的能力,a21表示食饵对捕食者的供养能力,a20表示捕食者的死亡率,a11和a22分别表示x和y的种内作用系数,h表示食饵的常数收获率.a10,a11,a12,a20,a21,a22均为正常数.文献[4]讨论了系统(2)平衡点的类型、平衡点的稳定性和极限环的存在性.
具有线性收获率的捕食系统也被学者们广泛关注,并作出进一步的研究[5-7].敬石心等[8]讨论了具有线性收获率和扩散因素的捕食者-食饵模型:
(3)
其中,b,b1,b2,a21,a12均大于零,E为捕获努力量,种群x1,x2在同一斑块Ⅰ中,y1种群限制在斑块Ⅱ中,x1种群可以在两个斑块间扩散,扩散率为D1,D2.文献[8]讨论了收获和扩散因素对系统(3)平衡点的影响,证明了此系统正平衡点的全局渐近稳定性.
由于人类对食物的捕获率是不断变化的,常数收获率显然不符合实际情况.而在某种情况下,线性收获率过大可能导致生态失衡,反之则不能促进经济发展,因此,具有非线性收获率的捕食系统引起越来越多的学者关注[9-10].文献[10]研究了带有非线性收获率和功能性反应的捕食者-食饵模型:
(4)
x(t)与y(t)分别表示食饵和捕食者的种群密度,r表示内禀增长率,K表示食饵种群环境容纳量,p表示被捕食率,q表示捕食者将捕获的食饵转化为自身增长的转化率,a1和a2表示捕捞能力,d表示捕食者种群的死亡率.M和N表示可以捕获的最大量,
为食饵和捕食者的非线性收获率.文献[10]讨论了具有非线性收获率时,系统(4)平衡点存在的条件、平衡点的局部稳定性和全局稳定性.
本文将文献[10]中的非线性收获率
引入模型(1)中,再考虑两种群的密度制约因素,讨论如下食饵种群具有非线性收获率的捕食者-食饵系统:
(5)

1 平衡点的存在性
可得到模型(5)的平衡点:
(1)平凡平衡点P1(0,0);

2 平衡点的稳定性分析
系统(5)在任意平衡点(x,y)处的Jacobian矩阵为
证明(1)将P1(0,0)代入J(x,y)中得到系统(5)在P1处的Jacobian矩阵为
其特征方程为
(λ-a1+h)(λ+a2)=0,
故特征根为
λ1=a1-h>0,λ2=-a2<0,
所以,P1(0,0)是鞍点.
其特征方程为
故特征根为

接下来考虑系统(5)的正平衡点P3(x*,y*)的稳定性.将P3(x*,y*)代入J(x,y)中得到系统(5)在P3处的Jacobian矩阵为
其特征方程为
即

其中
令
T=b2x*-a2-s1x*-s2,

则特征方程可表示为
λ2+Tλ+D=0,
令
Δ=T2-4D,
由文献[10-13]可知下面的结论.
定理2(1)若D>0且Δ<0,则当T>0时,P3(x*,y*)为系统(5)稳定的焦点;当T<0时,P3(x*,y*)为系统(5)不稳定的焦点;
(2)若D>0且Δ>0,则当T>0时,P3(x*,y*)为系统(5)稳定的结点;当T<0时,P3(x*,y*)为系统(5)不稳定的结点;
(3)若D<0,则P3(x*,y*)为系统(5)的鞍点.
定理3若D>0,则当T>0时,平衡点P3全局渐近稳定.
证明取Dulac函数B(x,y)=xmyn,由于
g(x,y)=-a2y+b2xy-c2y2,
则

令
可得

根据定理2和Dulac判据[14]得平衡点P3是全局渐近稳定的.证毕.
3 收获的调控作用
两个种群的平衡密度表达式为

由
可以看出当食饵种群的捕获最大量M增加时,食饵种群的平衡密度随之减小,当食饵种群的捕获最大量M减小时,食饵种群的平衡密度则随之增大.由

可以看出当食饵种群的捕获最大量M增加时,捕食者种群的平衡密度随之减小,当食饵种群的捕获最大量M减小时,捕食者种群的平衡密度则随之增大.
也就是说,由于人们的捕捞行为,食饵种群的捕获最大量M增加时,食饵种群密度随之减小,捕食种群所掠食的食物逐渐匮乏,其种群密度也随之减小.食饵种群的捕获最大量M减少时,食饵种群密度随之增大,捕食种群就有了充足的食物来源,其种群密度也随之增大.
4 数值模拟
这一部分主要运用MATLAB软件包对系统(5)正平衡点稳定的结(焦)点进行验证.对于系统(5):
(1)如果a1=0.8,b1=0.05,c1=0.04,a2=0.03,b2=0.03,c2=0.07,M=2,则D=0.3959>0,Δ=-0.6405<0,T=0.9712>0.因此,由定理2(1)可知系统(5)的平衡点(18.2034,7.3729)是稳定的焦点,参看图1.

图1 系统(5)稳定的焦点
(2)如果a1=0.8,b1=0.05,c1=0.04,a2=0.01,b2=0.01,c2=0.07,M=2,则D=0.1784>0,Δ=0.0109>0,T=0.8512>0.因此,由定理2(2)可知系统(5)的平衡点(24.6047,3.3721)是稳定的结点,参看图2.
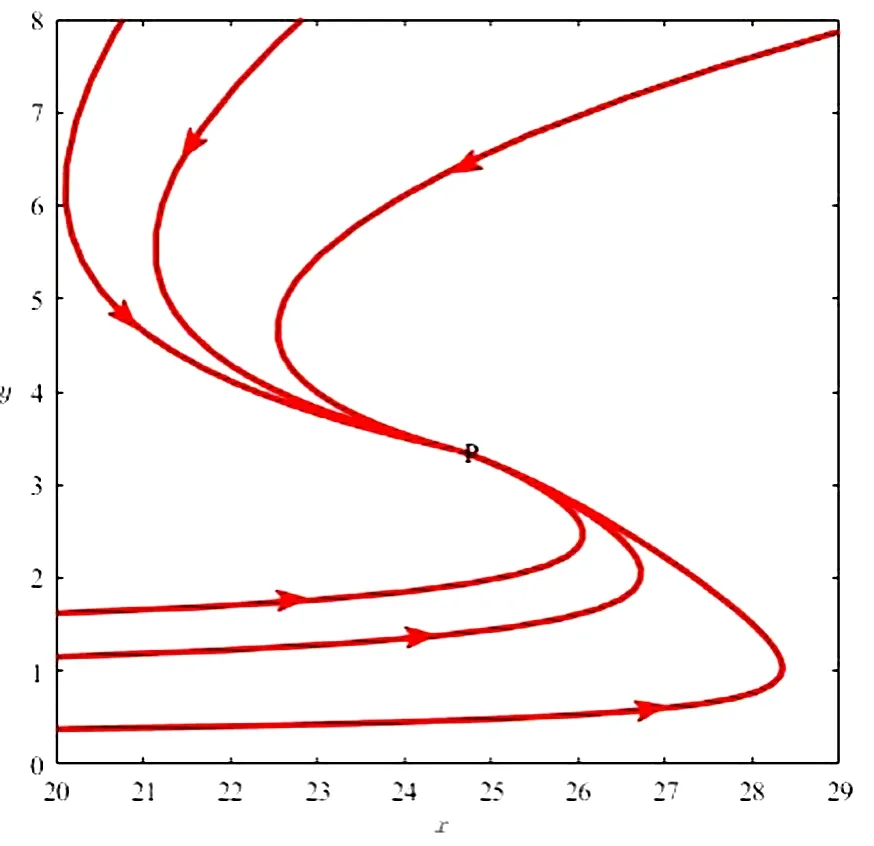
图2 系统(5)稳定的结点
5 结论
本文考虑一类食饵具有非线性收获率的捕食者-食饵模型,得到了系统平衡点的局部稳定和全局稳定的充分条件,说明了非线性收获率对这个系统的调控作用,并利用MATLAB软件对系统(5)正平衡点稳定的结(焦)点进行了数值模拟.
猜你喜欢
吉首大学学报(自然科学版)(2022年1期)2022-08-10
电子制作(2022年1期)2022-01-28
六盘水师范学院学报(2021年6期)2022-01-09
闽南师范大学学报(自然科学版)(2021年3期)2021-10-19
电子制作(2021年14期)2021-08-21
百科探秘·海底世界(2020年11期)2020-12-31
动漫星空(兴趣英语)(2018年4期)2018-10-30
中外文摘(2016年13期)2016-08-29
IT时代周刊(2015年7期)2015-11-11
散文百家(2014年11期)2014-08-21