混合现实引导蛛网膜下腔穿刺技术在老年患者中的临床应用
2021-11-04 10:09吴加珺施翘邱健健李铭陆建平徐凯秦春晖刘松彬
老年医学与保健 2021年5期
吴加珺,施翘,邱健健,李铭,陆建平,徐凯,秦春晖,刘松彬
1.复旦大学附属华东医院麻醉科,上海200040;2.复旦大学附属华东医院放疗科,上海200040;3.复旦大学附属华东医院放射科,上海200040;4.复旦大学附属华东医院手术室,上海200040;5.上海中医药大学附属岳阳中西医结合医院麻醉科,上海200437
老年患者由于腰椎退行性病变、椎管狭窄和脊柱畸形等原因[1],椎管内麻醉穿刺的难度增加,如何有效提高穿刺成功率是临床亟需解决的重要问题。报道[2-3]显示在超声和X 线引导下行椎管内穿刺有助于提高穿刺成功率。但对于肥胖和明显骨质增生的患者,超声图像清晰度较差,影响穿刺成功率。同时超声引导椎管内穿刺时,操作者一手持超声探头,另一手进行穿刺,这给操作者带来不便。因此,目前超声引导椎管内穿刺技术并未在临床上得到广泛应用。而X 线引导椎管内穿刺时患者需保持俯卧位,对于椎管内麻醉穿刺侧卧抱膝位的引导作用有限。目前椎管内穿刺仍缺乏可靠的可视化引导技术。
混合现实技术通过在虚拟环境中引入现实场景信息,在虚拟世界、现实世界和用户之间建立一个交互反馈的信息回路,将虚拟图像投射至患者相应的物理解剖位置,从而为解剖建模提供辅助,使原本复杂的操作简单化。目前混合现实技术在经导管二尖瓣置换术、神经外科手术及正颌外科手术中均已得到成功应用[4-6]。课题组前期通过CT 扫描的医学数字成像和通信数据重建志愿者的腰椎3D 图像,通过自主研发的医疗混合现实系统(专利申请号:201910767511.9)完成脊柱全息影像的物理空间还原,较好地实现了2次摆放体位的一致性和虚实图像的匹配准确性[7]。本研究在前期研究的基础上,将混合现实技术应用于老年患者的蛛网膜下腔穿刺,验证混合现实引导腰椎穿刺技术的可行性和效果。
1 资料与方法
1.1 一般资料 2019年4月—2019年7月,纳入复旦大学附属华东医院择期行腰椎蛛网膜下腔麻醉的手术患者60 例,年龄65~88 岁,平均(74.3±6.6)岁。纳入标准:(1)性别不限;(2)年龄≥65 岁;(3)美国麻醉医师协会分级I~II 级;(4)知情同意。排除标准:(1)凝血功能异常;(2)穿刺部位感染;(3)神经系统疾病或颅内压升高;(4)慢性腰背痛、腰椎外伤及手术史;(4)严重低血容量状态;(5)无法配合穿刺。本研究经过医院伦理委员会审批(2017K018-X181),并于中国临床试验注册中心注册(ChiCTRIPR-17010642)。
1.2 方法 根据随机数字表将患者分为盲穿组(n=30)和混合现实组(n=30),盲穿组通过传统的盲穿法进行腰椎穿刺,混合现实组以混合现实引导技术进行腰椎穿刺。所有患者的腰椎穿刺操作均由同一名高年资主治医师完成。
1.2.1 盲穿组 根据患者的体表解剖学标志进行定位,消毒铺巾,采用盲穿法经正中入路行蛛网膜下腔穿刺。
1.2.2 混合现实组 体位固定采用自主设计并制作的第二代体位固定装置——坐标式体位固定板。固定板为亚克力材质,横轴方向有39 个直径为1.5 cm 的圆孔,以数字1~39 标记。长轴方向的圆孔数为18 个,以A~R 标记,每个孔间隔1 cm。活动式固定棒可以根据受试者体型固定人体的肩胛部、前胸、臀部、下肢和膝关节等部位,记录每个固定棒的坐标。见图1。
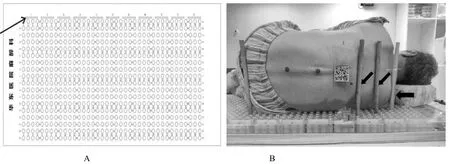
图1 第二代坐标式体位固定板
术前混合现实组患者取侧卧抱膝位,侧卧于坐标式体位固定板上。通过活动固定棒固定患者肩胛部、胸前区、腰部、臀部、下肢和膝关节等部位,使其体位完全固定,记录活动固定棒的坐标。患者体位固定后,将固定于垂直塑料板上的二维码插入固定卡槽,以便在正式腰穿时使用混合现实眼镜快速识别二维码,实现虚拟腰椎图像与人体的快速匹配。同时,在患者背部粘贴2 个信标,以记号笔描记信标在患者后背的放置部位,作为操作者微调虚拟腰椎图像空间位置的参考标记。
患者术前1 天行腰椎CT 扫描,扫描层间距为1 mm。本研究与上海瓴舸网络科技有限公司合作,采用自主设计的Reacool-MMR 系统进行虚拟腰椎图像的重建和导入。将混合现实组患者的CT 影像数据经过拼接、剥制、减面与合成,转化为虚拟腰椎3D 图像后上传至混合现实眼镜内。
蛛网膜下腔穿刺前根据CT 扫描体位所记录的固定棒坐标重新摆放并固定体位,插入二维码塑料板。操作者佩戴混合现实眼镜(HoloLens,1 代)注视二维码,通过眼部跟踪技术自动扫描二维码,实现虚拟腰椎图像与真实腰椎的快速匹配。通过微调使虚拟信标与真实信标完全重合,从而达到虚拟腰椎图像与真实人体腰椎的准确匹配。匹配完成后消毒铺巾,在混合现实眼镜引导下行蛛网膜下腔穿刺。见图2。

图2 混合现实眼镜成像在患者背部的投影
1.3 观察指标 记录2 组患者的穿刺次数、穿刺调整次数、穿刺时间和总穿刺时间。穿刺次数为腰椎穿刺针进出皮肤的次数。穿刺不成功、穿刺针退至皮肤外或重新穿刺时穿刺次数记为1 次。穿刺调整次数为进针后调整穿刺针方向的次数。穿刺时间为进针至脑脊液流出的时间。总穿刺时间为操作者摆放患者体位及消毒铺巾完成后开始计时至脑脊液流出的时间。
1.4 统计学分析 采用SPSS22.0 软件对所有计量资料进行正态性检验。正态分布的计量资料以均数±标准差(±s)表示,组间比较采用独立样本t 检验;非正态分布的计量资料以中位数(四分位数)表示,采用Mann-Whitney U 秩和检验。计数资料以例(%)表示,采用卡方检验。<0.05 为差异有统计学意义。
2 结果
2.1 一般资料 混合现实组与盲穿组的心率差异有统计学意义(=0.010),2 组患者的年龄、性别、身高、体重、体质量指数(body mass index,BMI)、平均动脉压、凝血酶原时间和活化部分凝血活酶时间等一般资料差异均无统计学意义(均>0.05)。见表1。
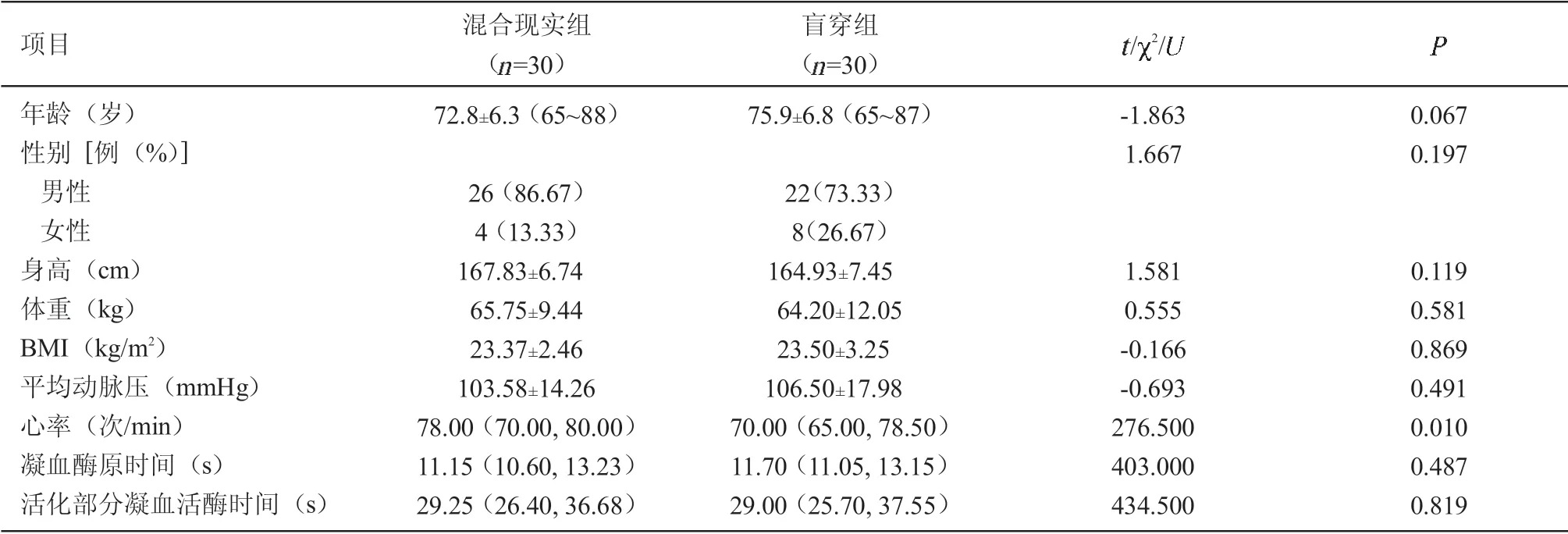
表1 2 组一般资料比较
2.2 2 组穿刺次数和穿刺调整次数比较 混合现实组的穿刺调整次数少于盲穿组(=0.031),2 组的穿刺次数差异无统计学意义(>0.05)。见表2。

表2 2 组穿刺次数和穿刺调整次数比较(次)
2.3 2 组穿刺时间和总穿刺时间比较 2 组患者的穿刺时间和总穿刺时间差异均无统计学意义(均>0.05)。见表3。

表3 2 组穿刺时间和总穿刺时间比较(s)
3 讨论
椎管内阻滞能减少术中的应激反应,降低术后肺部并发症、下肢静脉血栓和肺静脉血栓的发生率,有助于减轻术后疼痛,促进患者早期下床活动和康复。传统的椎管内穿刺多采用盲穿技术,但老年患者的失败率较高,因此蛛网膜下腔穿刺可视化技术逐渐受到临床麻醉医师的关注。
以往的研究多采用超声与X线引导行蛛网膜下腔穿刺,由于可行性欠佳,未能在临床上得到广泛应用。混合现实技术结合了注册跟踪技术、手势识别技术、3D 交互技术、语音和声音交互技术与头戴式显示设备等,可实现数字虚拟对象与现实世界对象在同一环境中的共存,进行人机交互,达到虚拟世界与真实世界实时、深度互动的状态[8]。近年来,混合现实技术已逐步在诊断、外科手术、康复治疗和医学教育等多个医学领域得到应用[9-12]。通过混合现实技术的精准引导,能够显著提高穿刺活检的成功率以及口腔手术的准确性[13-14],因此该技术在临床诊疗工作中有着较高的应用价值。
目前,混合现实技术在蛛网膜下腔穿刺中的应用尚未见报道。本研究采用混合现实智能全息眼镜,将虚拟图像与现实环境的光融合在一起,产生全息图像[15]。操作者通过混合现实眼镜使虚拟图像与现实环境相结合,使操作更加精准[16]。此次研究2 组患者的术前心率差异有统计学意义(=0.010),考虑混合现实组患者需在背后垫上由亚克力板制成的体位固定板,质地硬、舒适度差、应激较大,容易引起患者心率加快。穿刺结果显示,2 组在穿刺次数方面差异无统计学意义(=0.120);但相较于盲穿法,混合现实引导可以减少穿刺调整次数(=0.031),避免了穿刺调整对患者的损伤。此外,由于盲穿组需要手动定位髂前上棘和腰椎间隙;而混合现实组通过视觉跟踪技术进行贴合,无需手动定位,因此后者的总穿刺时间较盲穿组有减少的趋势。但2 组在总穿刺时间和穿刺时间方面差异均无统计学意义,无论是穿刺时间还是总穿刺时间都较短,仅有4 例患者的穿刺时间超过200 s,穿刺时间最长的1 例患者也仅需287 s,所有患者的蛛网膜下腔穿刺都较顺利。提示混合现实引导蛛网膜下腔穿刺既能减少对患者的损伤,也并未增加穿刺时间和总穿刺时间,具有较好的临床可行性。值得注意的是,将混合现实引导技术应用于蛛网膜下腔的穿刺过程中,穿刺路径的选择取决于虚拟腰椎图像在患者背部的投影。而虚拟腰椎图像与真实腰椎匹配的准确性不够可能会造成穿刺路径偏差,导致组织损伤。
本研究存在一定的局限性:(1)混合现实技术需要在穿刺前根据CT 扫描图像建立虚拟腰椎图像,术前采集CT 图像会对患者产生一定的辐射,增加临床工作负担;(2)作为单中心的探索性研究,根据SPSS 2019 的Pilot Study Sample Size 原则,样本量设定为每组30 例,总体样本量较小。研究结果有待于多中心、大样本研究的进一步验证。
综上所述,本研究为混合现实引导技术在蛛网膜下腔穿刺中的应用奠定了基础,作为新型可视化技术在麻醉学领域的初步探索,研究结果证实混合现实引导腰椎蛛网膜下腔穿刺具有一定的临床可行性。今后可以考虑将该技术应用于腰椎畸形等腰椎穿刺困难的患者,以期获得更大的临床应用价值。
猜你喜欢
临床骨科杂志(2022年2期)2022-11-24
中华骨与关节外科杂志(2022年1期)2022-08-31
中老年保健(2022年1期)2022-08-17
中国药学药品知识仓库(2022年9期)2022-05-23
中国典型病例大全(2022年9期)2022-04-19
医药前沿(2022年3期)2022-03-19
健康之家(2021年1期)2021-07-01
中国保健营养(2019年7期)2019-10-21
祝您健康(1985年2期)1985-12-29