
万向节轴系倾角对水下航行体声场辐射特性的影响
2021-11-04 06:05:46余靖
数字海洋与水下攻防 2021年5期
余 靖
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水下航行体低噪声性能是其总体性能先进性的重要评价指标,水下航行体声辐射噪声包括机械噪声、水动力噪声、螺旋桨噪声,其中机械噪声最主要来源于动力推进系统,因此评估水下航行体动力推进系统振动噪声水平尤为重要。
万向节传动是动力系统中常用的动力传递方式,其具有较大的角度和位移补偿能力,在输入和输出轴存在较大轴间夹角的情况下,也能稳定可靠地传递转矩和运动。但当其存在轴间夹角时,万向节传动会产生附加载荷,附加载荷可以引起与万向节相联组部件的振动;此外,由于安装误差等因素,动力推进系统组部件安装基座也可能出现一定的偏差角,从而造成输出转速和输出转矩的周期性非线性振动。由万向轴振动形成的激励会经由基座安装脚等传递路径在航行器壳体上形成异常的振动响应。
因此,探究万向轴轴间夹角和基座安装偏斜角对于动力系统振动声辐射的影响,有助于万向节联轴器的合理设计与准确布置,使其能更可靠地传递动力,抑制运动传递中产生的振动噪声辐射[2]。
1 单十字万向轴的传动特性
万向轴传动结构中,由于输入轴与输出轴之间存在一夹角,单十字万向轴主、从动轴的瞬时角速度比是变化的。
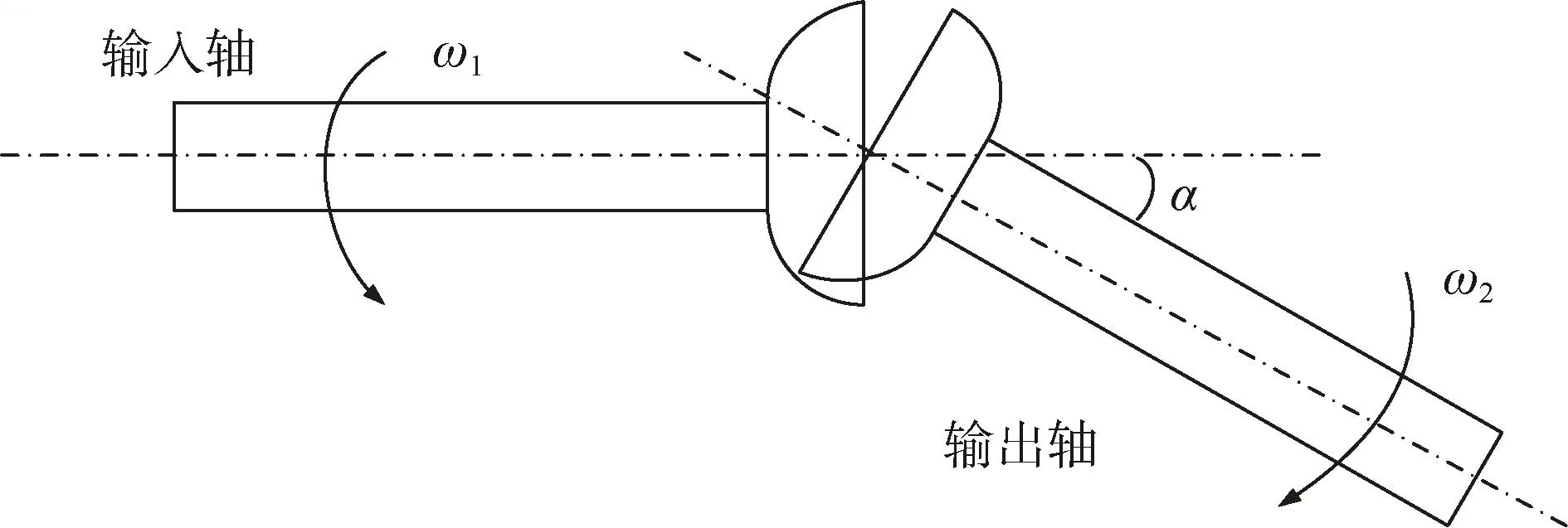
图1 单十字万向轴传动Fig.1 Single cross cardan shaft drive
由相关文献可得主、从动轴的角速度1ω,2ω之间关系[3]:

式中:1ω为主动轴角速度;2ω为从动轴角速度。
依式(1)分别作出主、从动轴夹角α为0、1°、2°、3°时,从动轴角速度和角加速度随时间的变化关系如图 2、图 3,仿真时设主动轴转速为ω1= 1 500 r/min ,仿真时长为0.1 s。
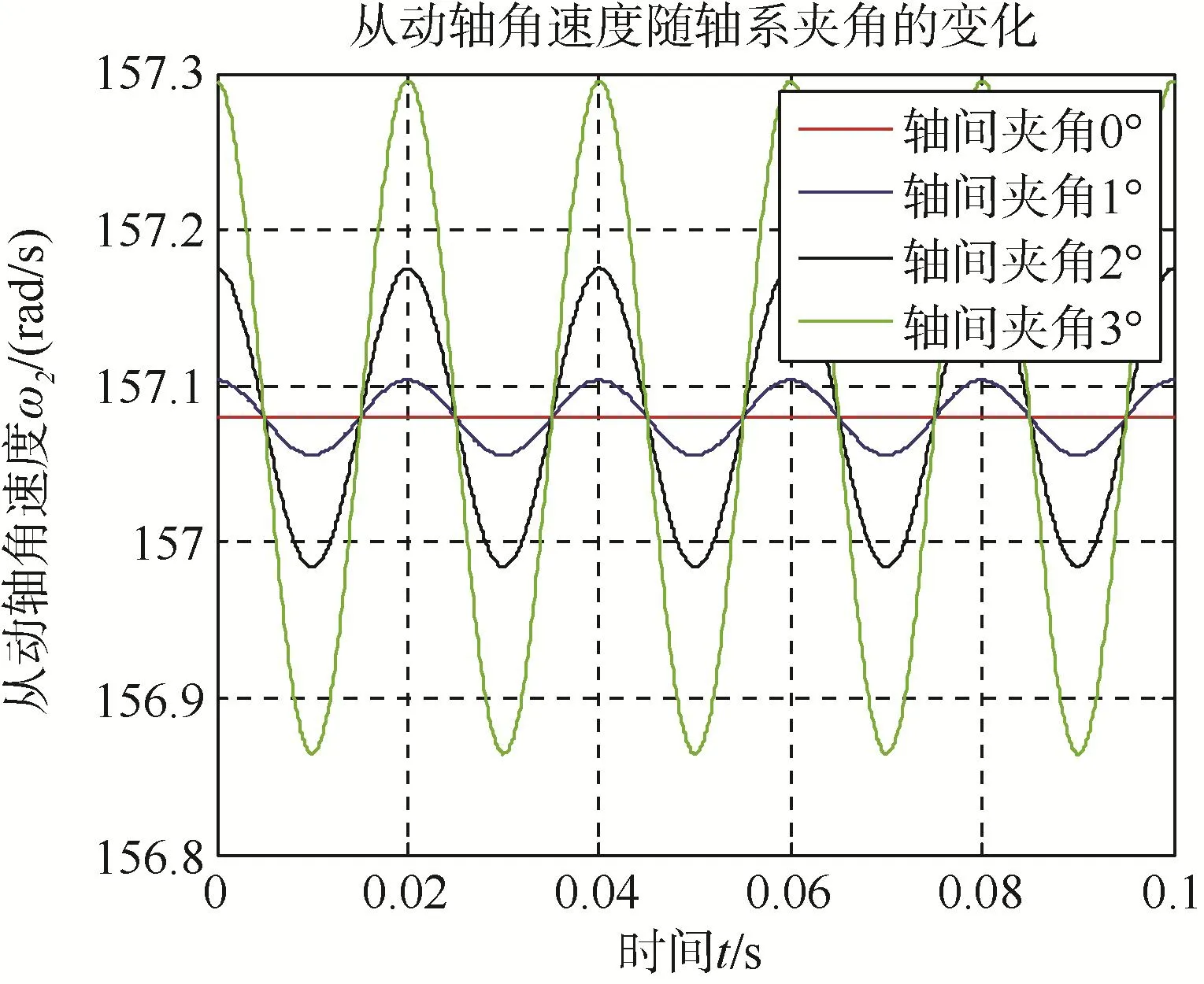
图2 从动轴角速度随时间变化Fig.2 Angular velocity of the driven shaft changing with time

图3 从动轴角加速度随时间变化Fig.3 Angular acceleration of the driven shaft changing with time
将式(1)对时间求导,得到从动轴角加速度表达式为

式中:1ξ为主动轴角加速度,2ξ为从动轴角加速度,依式(1)、(2)作出从动轴角速度与从动轴角加速度随时间变化的关系如图2-3。
从图2、图3可以看出:
1)主动轴每转一圈,从动轴角速度和角加速度变化经历了2个周期;
2)随着主从动轴轴间夹角的增大,从动轴角速度和角加速度幅值也增大。
由上述分析可知,单十字万向轴从动轴的角速度和角加速度均有较大的周期波动性,这也是其引起系统振动的根本原因。只有当主从动轴的轴线在一条直线上时,主从动轴才能实现等速传动,而只要主从动轴存在夹角,单十字万向轴的传动就是不等速传动。
2 存在基座偏斜角时万向轴传动特性
由于安装调试精度的影响,输入轴端和输出轴端可能存在一定的角度误差,以输出轴端为基准,将系统角度偏移量累积到输出轴端,设总的基座偏斜角为β。
图4中用α表示轴间夹角角度,β表示基座安装偏斜角度。
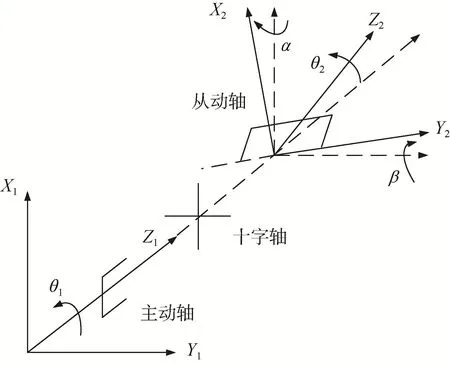
图4 动力系统安装坐标图Fig.4 Installation coordinate system for power system
坐标系 X1Y1Z1是主动轴上与机架固连的定坐标系,坐标原点在轴叉的中点,x1y1z1是主动轴上与主动轴固连的动坐标系,它随主动轴一起转动,坐标系X2Y2Z2是从动轴上与机架固连的定坐标系,x2y2z2是从动轴上与从动轴固连的动坐标系,它随从动轴一起转动。各坐标系间的关系是:X1Y1Z1绕Z1轴旋转θ1角度得到x1y1z1,X2Y2Z2绕Z2轴旋转θ2角度得到x2y2z2,X1Y1Z1绕Y1轴旋转α角度得到中间坐标系 X′Y′Z′,X′Y′Z′再绕 X’轴旋转β角度得到X2Y2Z2。
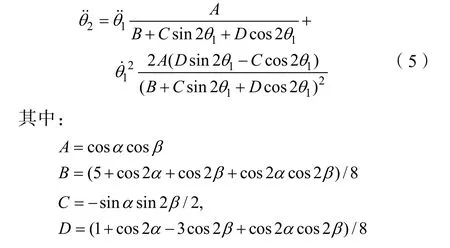
经坐标变换和坐标向量几何关系计算化简可得:

将式(3)对时间求导可得角速度波动公式:

对式(4)求导得角加速度波动公式:
采用MATLAB对轴间夹角和基座倾斜角同时存在的情况进行仿真,轴间夹角取值范围为1°~3°,基座倾斜角取值范围为1°~3°,仿真结果如图5-6。
从图5-6可以看出:
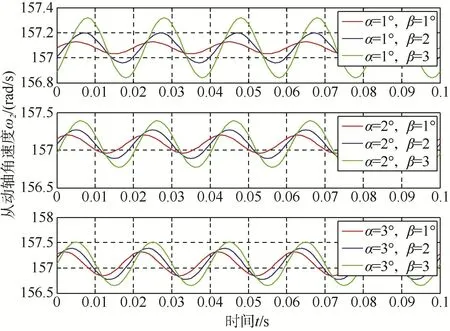
图5 从动轴角速度随时间的变化Fig.5 Angular velocity of the driven shaft changing with time
1)主动轴每转一圈,主从动轴加速度比值、从动轴角速度、从动轴角加速度变化都经历了2个周期;
2)相同轴间夹角情况下,从动轴角速度和角加速度随着基座倾斜角的增大而增大,且从动轴加速度幅值存在相位差;
3)相同轴间夹角情况下,基座偏斜角的存在增大了从动轴角速度和角加速度的幅值。
当主动轴以1 500 r/min匀速运动时,各动力学量随轴间夹角和基座倾角的变化情况如表1。
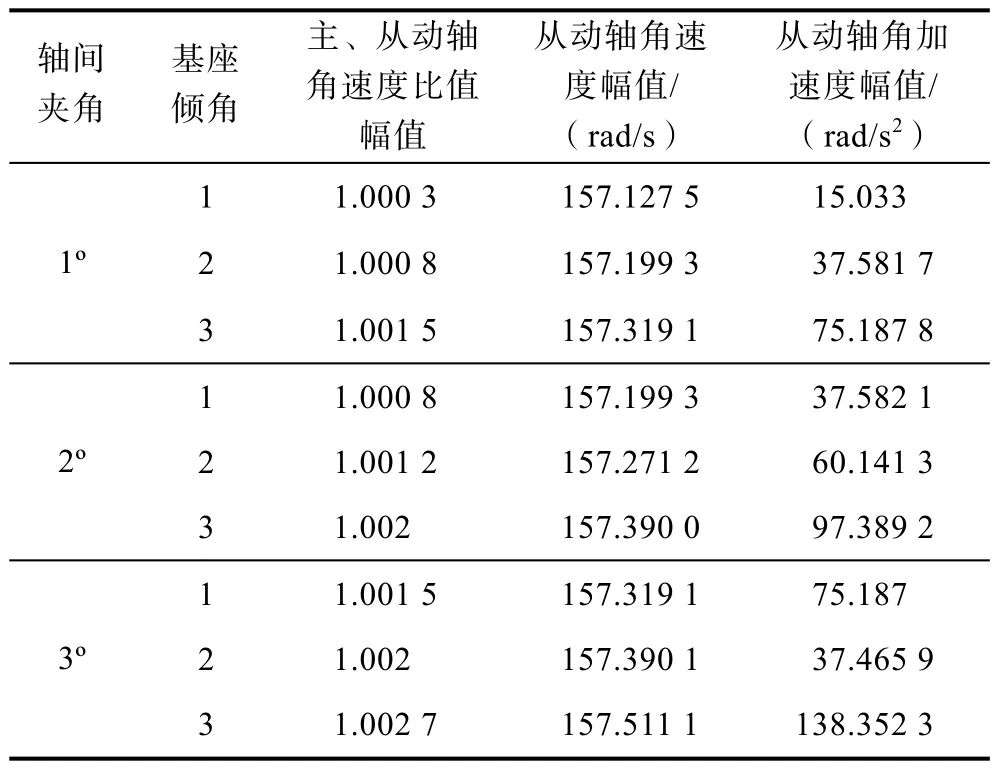
表1 轴间夹角和基座倾角存在时系统运动学量变化情况Tabel 1 Change of system dynamical variables with shaft angle and pedestal angle
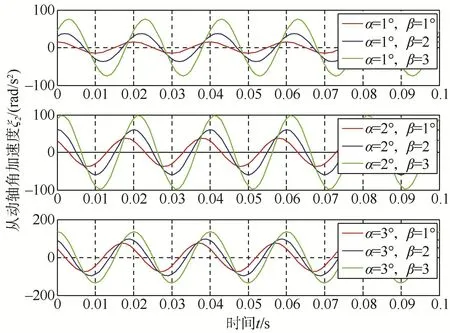
图6 从动轴角加速度随时间的变化Fig.6 Angular acceleration of the driven shaft changing with time
由上述分析可知,当动力推进系统采用带有轴间夹角的十字万向轴时,即使输入轴处于匀速状态,输出轴的运动也是非线性状态,轴系倾角的存在使得系统的动力学量都有所增加,其中从动轴角加速度增加尤为明显,这表明轴系倾角的存在增大了轴系输出端的偏载,使得系统的动力学状态更加复杂,从而产生异常的振动和噪声辐射。
3 推进系统振动测试
本文针对十字万向轴不同的轴间夹角和输出端电机底座不同倾角进行了相应的振动测试,其中十字万向轴的轴间夹角可调状态为0°和4°,输出端电机底座的可调状态为0°、2°和4°,试验时柴油机运行工况为转速1 500 r/min ,负载10 kW。取柴油机斜对角的两个机脚分别布设一个加速度传感器,在电机的 4个机脚分别布设一个加速度传感器。对所采集到的数据进行振动加速度谱级、总级分析[6-7]。
3.1 柴油机机脚振动
当轴间夹角分别为0°和4°,电机基座倾角分别为0°、2°、4°时,柴油机机脚的平均振动加速度谱级如图7-8。
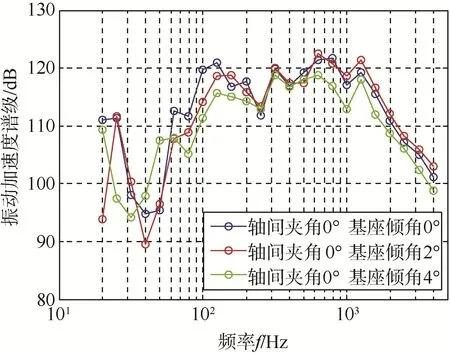
图7 轴间夹角0°时柴油机机脚谱级Fig.7 Diesel engine’s foot spectrum level at shaft angle of 0°
当轴间夹角为0°时,从图7中可以看出:在中心频率25~63 Hz内,柴油机机脚在基座倾角0°与基座倾角2°时的1/3倍频程平均加速度谱级大小基本相等,且均小于基座倾角4°时的谱级;在中心频率63~250 Hz内,不同角度对应的柴油机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角 0°、基座倾角 2°、基座倾角 4°;在中心频率250~800 Hz内,柴油机机脚在基座倾角0°与基座倾角2°时的1/3倍频程平均加速度谱级大小基本相等,且均大于基座倾角4°时的谱级;在中心频率0.8~4 kHz内,不同角度对应的柴油机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角 2°,基座倾角0°,基座倾角4°;柴油机机脚1/3倍频程平均加速度谱级最大值点出现在轴间夹角 0°,基座倾角2°,中心频率630 Hz处。
当轴间夹角为4°时,从图8中可以看出:在中心频率25~50 Hz内,柴油机机脚在基座倾角0°与基座倾角2°时的1/3倍频程平均加速度谱级大小基本相等,且均小于基座倾角4°时的谱级;在中心频率50~100 Hz内,不同角度对应的柴油机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角4°、基座倾角 2°、基座倾角 0°;在中心频率 200~800 Hz内,不同角度对应的柴油机机脚 1/3倍频程平均加速度谱级由大到小依次为基座倾角4°、基座倾角2°、基座倾角0°;在中心频率0.8~4 kHz内,不同角度对应的柴油机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角 2°,基座倾角 0°,基座倾角4°;柴油机机脚1/3倍频程平均加速度谱级最大值点出现在轴间夹角4°、基座倾角0°,中心频率125 Hz处。
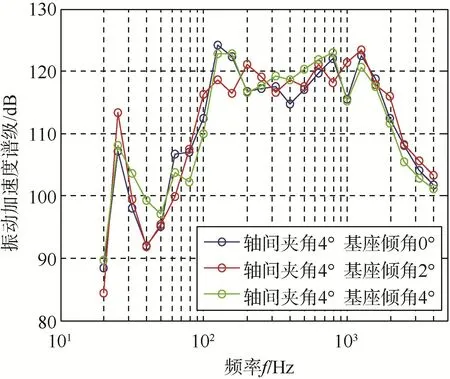
图8 轴间夹角4°时柴油机机脚谱级Fig.8 Diesel engine’s foot spectrum level at shaft angle of 4°
3.2 推进电机机脚振动
当轴间夹角为 0°,电机基座倾角分别为 0°、2°、4°时,推进电机机脚的平均振动加速度谱级如图9-10。
当轴间夹角为 0°时,从图 9中可以看出:基本在全频带内,不同角度对应的电动机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角0°,基座倾角2°,基座倾角4°;柴油机机脚1/3倍频程平均加速度谱级最大值点出现在轴间夹角 0°,基座倾角0°,中心频率800 Hz处。
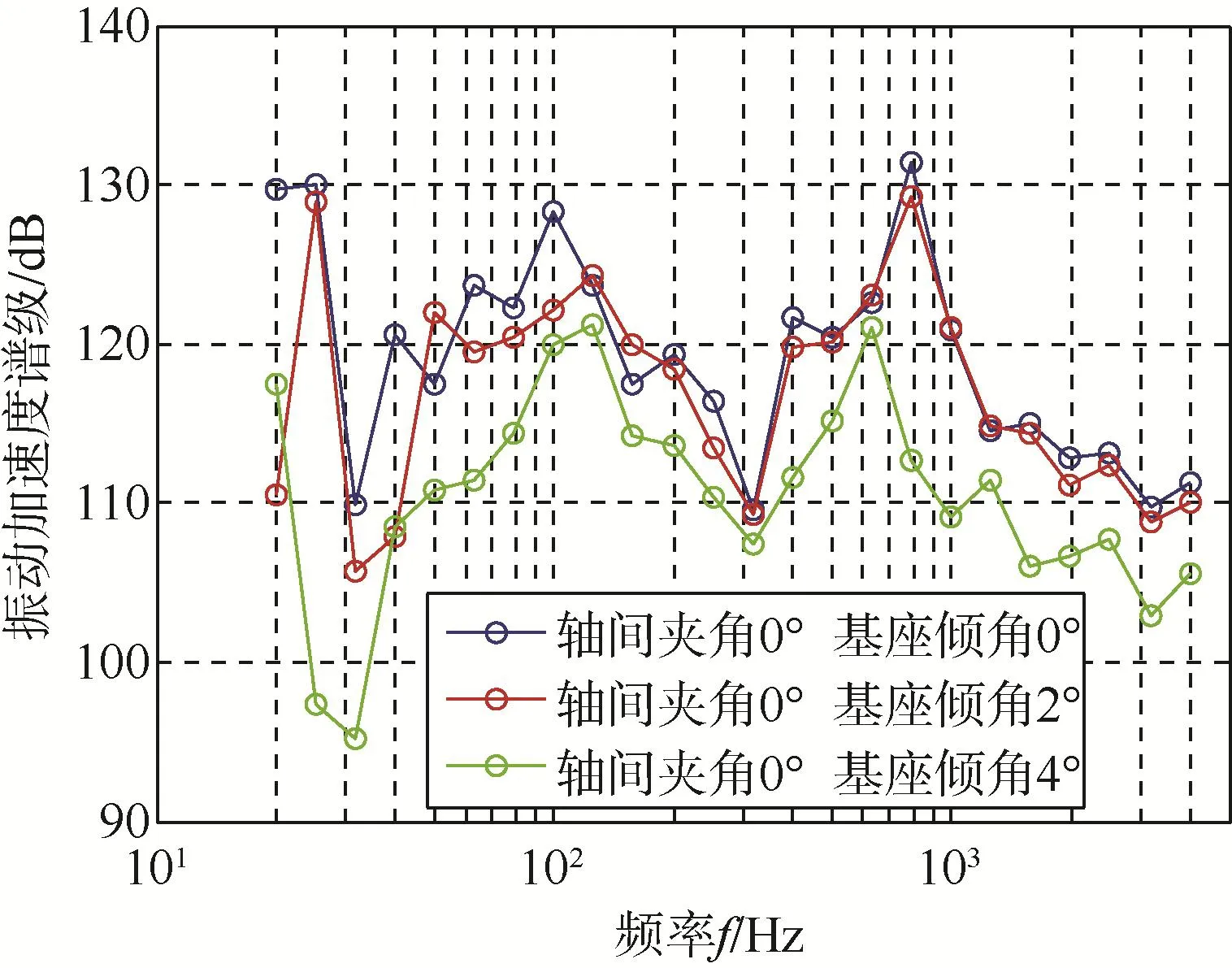
图9 轴间夹角0°时电动机机脚谱级Fig.9 Electromotor foot’s spectrum level at shaft angle of 0°
当轴间夹角为4°时,从图10中可以看出:在中心频率20~63 Hz内,不同角度对应的柴油机机脚 1/3倍频程平均加速度谱级由大到小依次为基座倾角4°、基座倾角0°、基座倾角2°;在中心频率63~125 Hz内,不同角度对应的柴油机机脚1/3倍频程平均加速度谱级由大到小依次为基座倾角2°、基座倾角 0°、基座倾角 4°;在中心频率 0.25~4 kHz内,基座倾角2°对应的柴油机机脚1/3倍频程平均加速度谱级最大,基座倾角 0°、基座倾角4°对应的柴油机机脚 1/3倍频程平均加速度谱级基本相等;柴油机机脚 1/3倍频程平均加速度谱级最大值点出现在轴间夹角 4°、基座倾角 0°,中心频率125 Hz处。

图10 轴间夹角4°时电动机机脚谱级Fig.10 Electromotor foot’s spectrum level at shaft angle of 4°
3.3 推进系统振动总级
各状态下柴油机机脚和推进电机机脚的振动加速度总级如表2。
由表2可以看出:轴间夹角0°/基座倾角4°时,柴油机机脚的平均总级最小,为124.44 dB;轴间夹角 4°/基座倾角 2°时,柴油机机脚的平均总级最大,为127.69 dB;轴间夹角0°/基座倾角4°时,推进电机机脚的平均总级最小,为124.45 dB;轴间夹角 0°/基座倾角 0°时,推进电机机脚的平均总级最大,为133.48 dB。
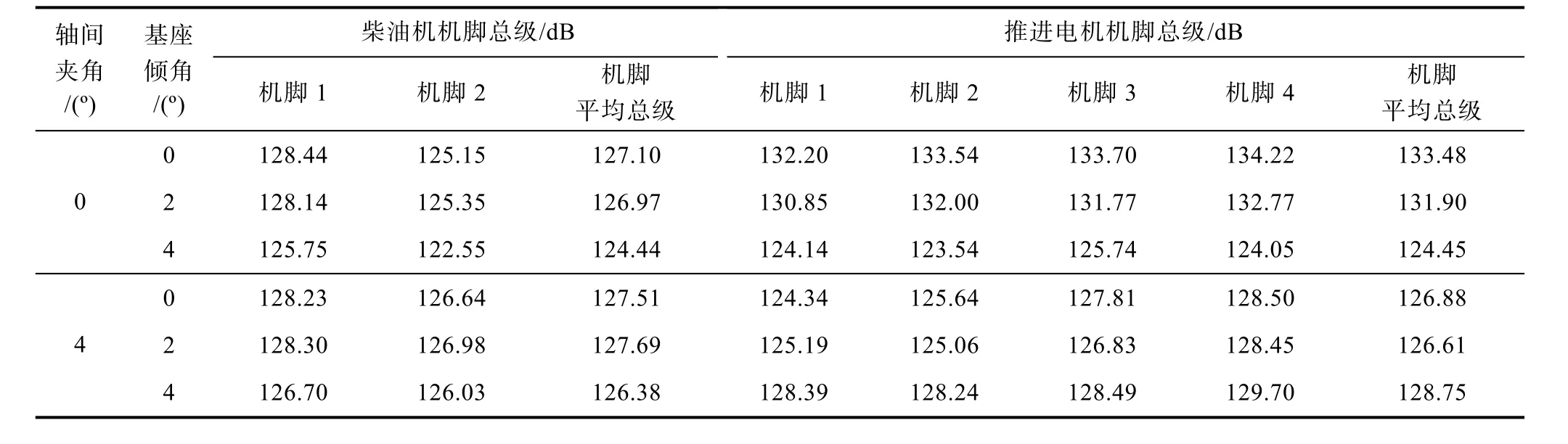
表2 柴油机机脚和推进电机机脚的振动加速度总级Tabel 2 Vibration acceleration overall level of diesel engine foot and propulsion motor foot
4 结束语
本文通过MATLAB仿真分析了在存在轴系倾角和基座安装角情况下十字万向轴的动力学特性,明确了其产生运动波动和振动激励的原理,并对不同轴系倾角和基座安装角状态下的推进系统进行了水下振动辐射噪声测试,试验结果表明不同的轴系倾角和基座安装角状态下,系统的振动噪声总级也会不同,且在轴系倾角和基座安装角都为零的情况小,推进系统的振动噪声并不是最小,考虑与系统的振动传递和振动耦合,在安装调节范围内,必然存在一个轴系倾角和基座安装角的最佳状态,使得由于轴系倾角和基座安装角引起的推进系统振动噪声最小。为使航行体达到更好的声辐射性能,后续可以进行全系统建模仿真分析,并结合试验测试的方法,找到轴系倾角和基座安装角的最佳匹配状态,从而提高航行体的航行隐蔽性[8-9]。
猜你喜欢
应用声学(2022年6期)2022-11-23 10:51:14
强度与环境(2022年3期)2022-08-18 06:23:38
防爆电机(2021年2期)2021-06-09 08:14:48
医药前沿(2020年1期)2020-02-26 16:11:56
模具制造(2019年7期)2019-09-25 07:30:00
现代信息科技(2019年3期)2019-09-10 07:22:44
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
机械工程师(2014年9期)2014-07-08 02:15:56
振动、测试与诊断(2014年4期)2014-03-01 01:14:08
制造业自动化(2013年1期)2013-08-22 07:34:44
