LM AUV远程投送水雷雷位散布特性分析
2021-11-04 06:06洪咸东
数字海洋与水下攻防 2021年5期
洪咸东
(中国人民解放军 92101部队,福建 福州 350101)
0 引言
现代信息战争条件下,战场透明度越来越高,使用传统布雷平台难以完成作战使命,为此,世界各国海军致力研究使用远程自主式布雷器(以下简称LM AUV)投送水雷,将水雷远距离自主投送到预定区域[1]。然而,在使用LM AUV远距离投送水雷时,由于其航行速度低、航渡时间长,受海区自然条件(海流、水深等)影响及AUV自身导航定位技术的制约,LM AUV往往难以精确按预先设定的航路航行,导致布设的水雷实际位置与期望位置不相一致,这种位置偏差现象称为雷位散布[2]。
布雷作战时,水雷的雷位散布概率是评价雷障封锁效能的一项重要指标[3],是不容忽视的。雷位散布问题不仅对水雷障碍内部结构有着直接影响,而且也会影响水雷障碍的打击效果。鉴于此,研究LM AUV远距离投送水雷时雷位散布特性,分析流速、水深及航距对雷位散布的影响就显得很有必要。
1 雷位散布产生机理
使用LM AUV进行远距离投送水雷时,雷位散布主要由AUV航行至布雷阵位时的定位误差、机动航行段的航行误差以及投放水雷时水雷末弹道误差造成。有关LM AUV远程布雷误差产生机理分析详见参考文献[4],在此不再累述。
2 雷位散布模型
根据LM AUV使用特性,对各项误差引起的雷位散布进行建模。为便于建模研究,建立以雷区正面下边沿为X轴,纵向为Y轴,以AUV最后一次精确定位点为原点O的空间坐标系,预定水雷落点O′为雷位散布椭圆中心,设椭圆的长轴方向为航距散布,短轴方向为航向散布,则认为任意落点在雷线上投影点距离椭圆中心(预定落点)的距离σ服从正态分布[5]。
2.1 平台定位散布概率函数
AUV通常采用 GPS定位方式获得平台当前的GPS定位数据,对自主导航系统的导航误差进行校正。目前,GPS定位精度约为10 m左右,即AUV定位误差1σ=10 m,则平台定位散布概率密度函数为
2.2 平台机动航行段散布概率函数
由图1所示,自主导航系统精度 σ2= k1× D ,k1为导航误差系数,D为校准后航行距离,即航程散布概率密度函数为

图1 雷位散布坐标系Fig.1 Dispersion coordinates of mine location
横向偏移ΔL=D×sinθ,通过水声遥测系统对航向误差进行校正后,平均横向轨迹误差σ3=k2×D,k2为横向偏移误差系数,即航向散布概率密度函数为

2.3 水雷末弹道散布概率函数
由图2所示,水雷与AUV平台分离时,受海流影响所引起的漂移为

图2 水雷末弹道散布Fig.2 Terminal ballistic dispersion of mine

式中:v为海流平均流速;v0为水雷与平台分离时刻初速度;t为水雷分离时间。
水雷下沉过程受海流影响所引起的位移误差:

t′为水雷与平台分离至沉底时间,与水深h、水雷平均下沉速度相关,即

由于在海洋中海流是空间和时间的动态复杂矢量函数,水雷在水中运动的过程中受到海流的影响详见文献[6]-[7],在此不再累述。一般取最简单的情形认为v0=0,即平台为悬停状态;短时间内4σ、5σ位移的方向与海流流向一致,位移大小与平台、水雷的形状和海流流速、水深有关。则末弹道漂移散布概率密度函数:

2.4 雷位散布模型
根据上述分析,AUV布设水雷时存在随机散布现象,雷位总误差不能简单的线性相加,一般以均方差表示为

3 仿真分析
由式(9)可知,雷位散布主要与校准后自主航行距离D、导航精度k、海流流速v、平台悬停时间t及布雷水深h等密切相关。
图3 20 m水深时雷位散布与航行距离、海流流速关系Fig.3 Mine position dispersion in relation to navigation distance and current velocity at depth of 20 meters
3.1 航距对雷位散布影响
由图3-5可见,雷位散布误差与AUV自主航行距离、海流流速成正比关系;同时,也验证了AUV航位推算的定位误差是随着时间发散的[8],航距越远、航时越长,其布雷就位点的精度越低,定位误差就越大。据此,为了提高布雷精度,在战术运用上,AUV最后校准点选择尽可能地靠近布雷投放点,以缩短最后一次校准与水雷投放点之间的距离;然而,在实际使用时还要综合敌方威胁因素,从安全角度考虑,最后校准点选择应设置在敌严密防区或有效干扰区以外。如图4所示:若在50 m水深、海流流速v=2.5 m/s时布雷,需雷位散布误差不大于200 m,则选择最后校准点与水雷投放点之间的距离不大于15 km条件下,可满足雷位散布要求。
图4 50 m水深时雷位散布与航行距离、海流流速关系Fig.4 Mine position dispersion in relation to navigation distance and current velocity at depth of 50 meters
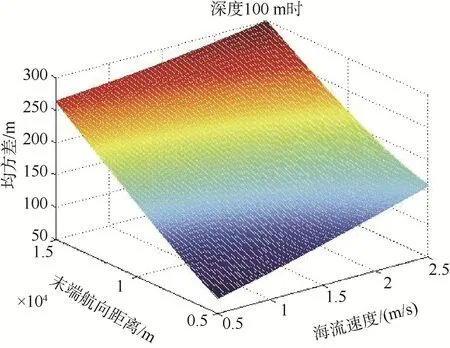
图5 100 m水深时雷位散布与航行距离、海流流速关系Fig.5 Mine position dispersion in relation to navigation distance and current velocity at depth of 100 meters
3.2 流速对雷位散布影响
通过模型仿真变化曲线可以看出,AUV位移大小与海流流速和水深有关:
1)整个布雷过程,AUV散布偏移量受到海流的影响较大,流速越大,位移误差就越大;
2)在自主航行距离确定情况下,不同布雷水深AUV散布偏移量与海流流速变化不明显。
如图3所示:若在20 m水深,AUV自主航距10 km进行布雷,要求雷位散布误差不大于150 m,则需在海流流速v≤2.5 m/s条件下才满足雷位散布要求。
3.3 水深对雷位散布影响
由式(6)可以看出:布雷水深主要对水雷末弹道漂移散布有影响,在水雷平均下沉速度不变前提下,随着水深的增大,水雷分离后至沉底间隔时间越长,漂移距离就越大。
如图6所示:若 AUV在自主航距 15 km,v=2 m/s条件下布雷,需雷位散布误差不大于250 m,则要求布雷水深在100 m以浅进行才能满足。

图6 雷位散布与航行距离、布雷水深关系Fig.6 Mine position dispersion in relation to navigation distance and minelaying depth
3.4 工程实践应用
若某次布雷作战时,要求雷位散布误差不大于200 m,则可对应不同布雷水深、海流流速下选择自主航行距离,并设置悬停时间;如图4所示,在50 m水深、海流流速v≤2.5 m/s,AUV自主航距不大于15 km条件下布雷,均可满足雷位散布要求。
4 结束语
LM AUV远程投送水雷雷位散布特性反应了其在不同自主航行距离、流速、水深情况下,布设水雷雷位散布的规律,对于科学确定雷障区域、选择布雷样式和水雷类型有一定指导意义,可为布雷作战方案的拟制完善、水雷障碍结构的优化配置提供理论参考。
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
学生天地·小学低年级版(2018年5期)2018-09-13
天津诗人(2017年2期)2017-11-29
小学生作文选刊·中高年级版(2017年10期)2017-11-07
数学大王·中高年级(2014年1期)2015-02-12
红领巾·探索(2014年8期)2014-10-10
情感读本·道德篇(2012年9期)2012-09-22
幸福·悦读(2012年5期)2012-09-22