
龙门轴在西门子与海德汉数控系统中的应用
2014-07-08 02:15:56王晓玉姜宇林剑锋仇健
机械工程师 2014年9期
王晓玉,姜宇,林剑锋,仇健
(沈阳机床(集团)有限责任公司,沈阳110142)
0 引 言
当前,很多数控机床为了满足某一个轴的大力矩要求,提高机床整体性能,应用了龙门轴的控制方法。对于数控系统而言,不同的数控系统控制龙门轴有不同技术特点,也会有相同的技术约定。本文主要分别针对西门子840D 系统和海德汉iTNC530 系统,将这两种系统应用于龙门结构进行介绍。
1 龙门轴简介
1.1 龙门轴定义
龙门轴英文定义为“Gantry axis”,西门子多译为“龙门轴”,而海德汉多译为“同步轴”,本文以“龙门轴”作为统称,一组龙门轴用相同的轴符号进行加工编程,如图1所示机床的X 轴即为龙门轴结构。
X 轴由X1 轴和X2 轴组成龙门轴共同驱动完成。其中X1 轴为主动轴,X2 轴为从动轴,主动轴和从动轴均有各自的位置环,只不过是从动轴的目标位置给定与主动轴是一样的,数控系统会检测由主动轴检测量的实际坐标与从动轴测量到的实际坐标的差值,防止对数控机床造成硬件的损坏。
1.2 应用龙门轴的注意事项
不论是西门子840D 系统还是海德汉iTNC530 系统,如果机床需要配置成为龙门轴,则有以下注意事项:
1)龙门轴组中的各个轴不能分别单独移动。
2)龙门轴中从动轴的名义值位置显示,显示的是龙门结构中与之对应的主动轴的位置名义值。
3)机床制造商在编制PLC 程序的时候,应当确保在主动轴移动之前,从动轴已经做好了移动准备,比如:伺服轴夹紧、松开、抱闸、轴进给使能等。
4)对于从动轴,其移动方向没有必要具体设置。
5)在配置龙门轴时,同一个轴不应该同时设置成一组龙门结构的主动轴和另外一组龙门结构的从动轴。
2 基于西门子840D 系统龙门轴的参数设置及应用特点
2.1 参数设置
以图1 所示的龙门机床为例,把X1 轴与X2 轴配置成龙门轴,需要设置的参数如下:
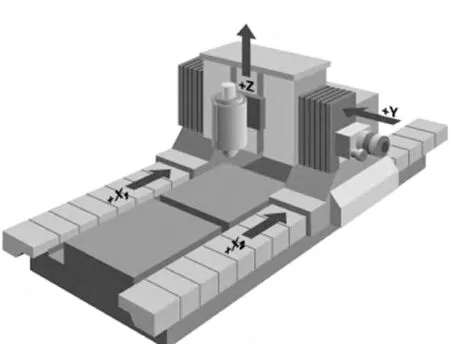
图1 大型龙门数控机床结构示意图
1)需要设置参数来激活龙门轴功能选项。
2)定义龙门轴组。西门子840D 系统一共可以定义8组龙门轴组,每组中可以定义1 个主动轴,1 个或2 个从动轴。在本例中要把X1 轴设置成为主动轴,把X2 轴设置成为从动轴,参数如下:
MD37100 GANTRY_AXIS_TYPE[X1]=1,
MD37100 GANTRY_AXIS_TYPE[X2]=11。
3)设置关于监控龙门轴组主动轴与从动轴位置偏差的参数。通过这些参数,可以根据数控机床的实际情况,来设定不同范围的报警值,恰当而及时地输出报警,保护数控机床。分别为:
MD37110$MA_GANTRY_POS_TOL_WARNING,
MD37120$MA_GANTRY_POS_TOL_ERROR,
MD37130$MA_GANTRY_POS_TOL_REF。
其中MD37110 与MD37120 均是当机床的龙门轴组回零完成以后生效的,MD37110 触发报警时,系统不会取消龙门轴的同步关系,而当MD37120 触发报警时,系统会自动取消龙门轴的同步关系。
2.2 参考点的坐标调整
西门子840D 系统龙门轴返回参考点的过程可以分为3 步:
第1 步:由龙门轴组中的主动轴先回参考点,从动轴不回,而是跟随着主动轴进行移动。
第2 步:只要主动轴已经完成回参考点,则从动轴会自动回参考点。
第3 步:当龙门组中所有轴均完成回参考点时,它们必须用在主动轴中事先定义好的参数进行同步。
在这个过程中,初次调整时,主动轴与从动轴之间的实际坐标值会相差很大,可以通过参数MD34090MA_REFP_MOVE_DIST_CORR,把这个差值输入到MD34090 中进行调整,这样重新上电后,主动轴与从动轴的坐标就一样了。
2.3 西门子系统应用龙门轴的注意事项
1)龙门轴组中的从动轴一定不能是主轴。
2)龙门轴组中的从动轴一定不能是PLC 轴。
3)龙门轴组中的从动轴一定不能被西门子动态描述中所寻址。
3 基于海德汉iTNC530 系统龙门轴的参数设置及应用特点
3.1 参数设置
对于海德汉iTNC530 系统,激活龙门轴,龙门组中的每一个轴的跟随误差控制及速度前馈控制都是仍然有效的,建立龙门组,参数设置如下:
分配一个从动轴给主动轴,MP850.x(其中x 为系统中设置的轴号),具体格式如下:
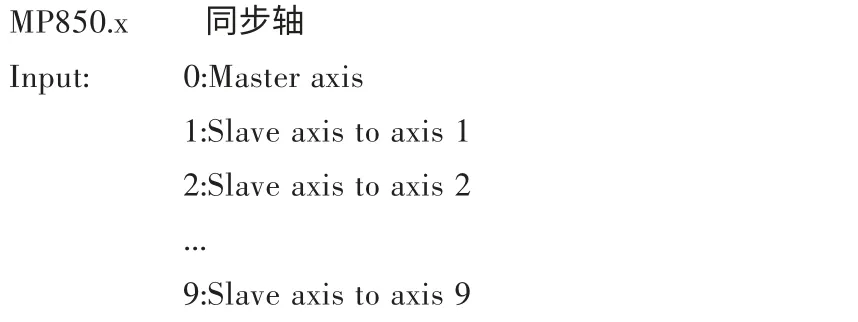
其中:在相应的轴参数MP850.x,Input:后面输入0,表示该轴为主动轴,如果输入的是1 到9 的阿拉伯数字,则表示该轴为从动轴,而与其对应的主动轴的轴号就是输入1 到9 的阿拉伯数字。
3.2 龙门轴之间的位置检测
海德汉iTNC 监控龙门组中轴之间的耦合,如果两个轴之间的机床坐标值存在差值(由跟随误差引起),海德汉iTNC 会显示从动轴报警:EXCESSIVE SERVO LAG IN <AXIS>,这个LAG 值显示了主动轴与从动轴之间的误差。
3.3 参考点坐标调整
1)MP860.x=0,输入在从动轴的参数中,此时可以选择机床启动时的位置为龙门轴的同步参考点,主动轴与从动轴必须在同一位置。
2)MP860.x=1,同样输入到从动轴的参数中,这时可以选择穿越参考点之后的坐标值为龙门轴的同步参考点,在穿越参考点之后,主动轴与从动轴必须定位同一个位置。默认的设置可以通过参数MP960.x(机床坐标值偏置)进行修改,但在修改MP960.x 之前,需要设置MP860.x=0,这样一来,在主动轴与从动轴之间将不会产生补偿运动。
3.4 海德汉系统应用龙门轴的注意事项
1)在MP1350.x 中,主动轴与从动轴必须设置相同的回参考点的方式。
2)在穿越参考点之后,从动轴同步补偿的速度应该输到MP1330.x 中。
3)在MP1340.x 中,设置的是主动轴与从动轴回参考点的顺序,主动轴必须先于从动轴。
4 结 语
目前,基于西门子840D 系统和海德汉iTNC530 系统的龙门轴控制方式,已经在我公司的多款数控机床上得到应用,控制效果良好。本文分别基于西门子840D 系统及海德汉iTNC530 系统,给出了龙门轴应用这两种系统时共性的注意事项及不同的应用特点,以供大家参考。
[1] Siemens DOConCD 2010[M].西门子工业自动化,2006.
[2] Heidenhain Technical Manual iTNC530 en[M].2007.
猜你喜欢
意林·少年版(2019年19期)2019-11-13 15:56:58
制造技术与机床(2019年9期)2019-09-10 07:37:18
科普童话·百科探秘(2019年4期)2019-05-24 08:02:50
科学与财富(2019年2期)2019-02-28 01:40:50
制造技术与机床(2017年9期)2017-11-27 02:14:32
工业设计(2017年6期)2017-06-11 20:12:24
机械工程师(2015年1期)2015-05-07 02:49:30
中小企业管理与科技·上旬刊(2014年4期)2014-06-30 01:49:45
制造业自动化(2013年1期)2013-08-22 07:34:44
科技创新与品牌(2013年5期)2013-04-29 21:06:08
