
水下机器人舵翼参数设计与优化
2021-11-02 11:55谷海涛冯萌萌赵志超
海洋技术学报 2021年4期
高 伟,谷海涛,冯萌萌,孙 原,赵志超
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016;2. 中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169;3. 中国科学院大学,北京100049)
随着科学技术的发展,水下机器人已成为海洋探测和开发的重要工具之一,可执行海洋特征观测、海底地貌调查、水下作业等任务,活跃在海洋科学和海洋工程等各领域。在水下机器人设计中,其操纵性是总体性能评价的一项重要指标,与艇体和舵翼的设计息息相关[1]。舵翼产生的水动力会在很大程度上影响水下机器人的航行状态,并且在舵机功率一定的条件下,舵翼铰链力矩越小,水下机器人对控制指令的响应越快[2]。因此,水下机器人舵翼设计需要重点考虑其水动力性能和铰链力矩以满足操纵性要求[3],涉及的主要关键问题有舵翼面积的计算、平面形状和剖面翼型的选择以及舵轴位置的确定。
目前,国内外对舵翼水动力性能和铰链力矩的研究主要采用数值计算方法及水池拖曳试验方法。王利东等[4]采用CFD方法分析了低雷诺数下梯形翼的水动力特性及其周围流场的特征。武建国等[5]对小型自主水下航行器的尾舵翼型和铰链力矩进行了分析,并找到了最小铰链力矩对应的舵轴位置。赵宝强[6]利用Javafoil程序得到水下滑翔机水平固定翼升阻比和翼型参数之间的特征关系。宫宇龙等[7]为获取优化的实验尺度水下滑翔机水平舵翼外形,分析了平板舵翼各参数间的关系。谷海涛等[8]采用基于代理模型的优化方法对滑翔机舵翼参数进行优化设计,得到一种高升阻比的舵翼模型。孙亦兵等[9]用正交试验法进行了九种舵模的风洞试验,研究了舵的参数和剖面形状对舵性能的影响。WANG X等[10]利用自由变形方法(FFD)和基于代理模型的优化设计方法(SBO)对 Spray 滑翔机舵翼的剖面翼型进行了优化设计。HSIN C Y[11]等考虑攻角和外倾角,基于RANS方程对舵翼剖面进行了设计和优化。GARG N[12]等提出一种高保真度的多点优化方法,针对目标CL值,优化了NACA0009舵翼外形,使其总体效率提升了14.4%。但这些研究未能明确指出不同平面形状和剖面翼型舵翼的适用场景及其性能特点。
通过水池拖曳试验研究舵翼参数对其性能的影响成本较高,本文以某型水下机器人舵翼为研究对象,采用CFD软件模拟了流速为2 kn时,舵翼在不同来流下的流场情况,并在小型拖曳水池进行了数值计算方法的准确性试验验证。分析了舵翼平面形状参数与其水动力性能和铰链力矩之间的变化规律和相对灵敏度,并对基于径向基函数模型(RBF)的优化结果进行分析,随后对比了不同剖面翼型对舵翼性能的影响,研究结论可以为水下机器人舵翼设计优化提供参考。
1 数值计算方法
1.1 控制方程和湍流模型
本文采用STAR-CCM+软件对舵翼进行数值模拟。在实际计算中,为减少计算量,将求平均值视为稳态情况的时间平均以及可重复瞬态情况的整体平均,控制方程采用雷诺时均N-S方程,即RANS方程[13]。假设流体为不可压缩的连续介质,且不考虑热交换,可得雷诺时均化后的平均质量和动量传输方程如下:

式中:ρ为密度;v-和p-分别为平均速度和平均压力;I为单位张量;T为粘性应力张量;fb为体积力的合力。
由于RANS方程的不封闭性,需要引入湍流模型来封闭方程组。CFD中常用的湍流模型有零方程模型、一方程模型、两方程模型和多方程模型[14],一般随着方程数的增加,计算精度随之提高,但计算量也越大,收敛性变差。根据舵翼仿真场景特点,本文采用Realizable k-ε两方程湍流模型,该模型在鲁棒性、计算资源成本和准确性之间提供了一个较好的折中[15]。
1.2 几何模型和计算域
以某型水下机器人的舵翼为原始计算模型,根弦长为0.2 m,梢弦长为0.1 m,半展长为0.6 m,平板翼型厚度为0.06 m,前缘后掠角为18.43°,单侧舵翼面积为0.09 m2,流体计算域及边界条件如图1所示。其中,计算域为2.8 m×2.2 m×1 m的长方体,为了合理布置网格,舵翼周围为局部加密区域。左侧和周围侧面为速度入口边界,入口速度设定为[1.0288,0,0] m·s-1,右侧为压力出口边界,出口压力设定为0 Pa,舵翼表面边界为壁面条件。

图1 计算域及边界条件
1.3 网格无关性验证
网格划分采用切割体网格生成器生成六面体网格,并在舵翼表面和周围流场采取网格加密处理,边界层处加入8层棱柱网格以有效模拟近壁面处的流动。若网格基本尺寸为BS,两重加密区域和舵翼表面的网格尺寸分别为0.5BS、0.125BS和0.0625BS,为了选取合适的网格基本尺寸,使用6种不同网格基本尺寸计算来流流速为2 kn,攻角α=4°工况下舵翼的升力系数和升阻比,以便进行网格无关性验证,计算结果如表1所示。表1中,N为网格数量;CL为升力系数;ΔCL为升力系数的相对误差;λ为升阻比;Δλ为升阻比的相对误差。

表1 网格无关性验证
可以看出,升力系数在网格基本尺寸为0.048 m时,就可以获得较高的计算精度;升阻比对网格尺寸变化比较敏感,网格基本尺寸小于0.04 m后,升阻比数值变化不大但网格数量快速增加。考虑实验室计算资源,最终选用322.5万网格进行舵翼流体仿真计算,网格划分场景如图2所示。

图2 网格划分场景
1.4 准确性验证
为了验证STAR-CCM+数值模拟方法计算结果的准确性,在小型拖曳水池进行原始模型的拖曳试验,水池尺寸为4.5 m×2 m×1 m,导轨滑台的最大行程为3.9 m,利用ATI多轴力/力矩传感器记录试验模型运动过程中受到的升力和阻力,试验装置如图3所示。

图3 小型拖曳水池试验装置
本文计算了原始模型在来流速度为2 kn时,升力系数、阻力系数和升阻比随攻角的变化曲线,并与拖曳试验的结果进行比对,如图4所示。从图4中可以看出,升力系数和阻力系数与攻角呈正相关,升阻比先增大后减小。攻角小于12°时,CFD计算结果略小于试验值,吻合度较高,当攻角继续增大,CFD值与试验值的趋势一致,最大误差为22.4%,这是由于此时试验模型受到的力较大,引起周围水流强烈运动,水池壁面效应干扰明显导致的。
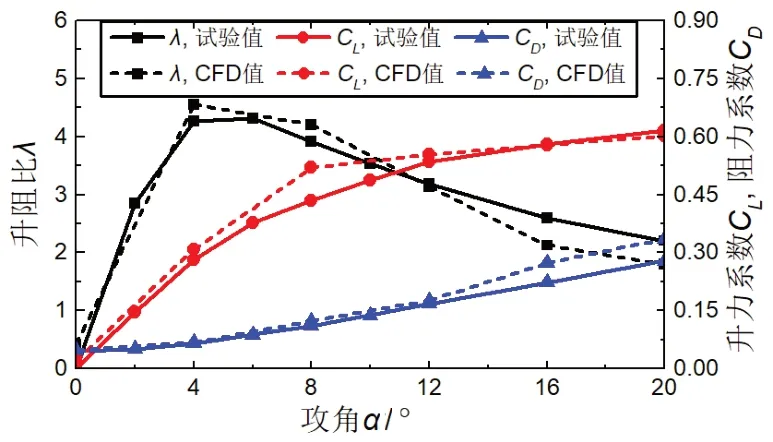
图4 原始模型水动力性能随攻角的变化曲线
2 基于代理模型的优化设计方法
工程优化设计涉及多变量、多工况的计算分析,整个优化设计过程需要大量的计算资源且费时费力。为了均衡精度和效率之间的矛盾,研究人员提出了基于代理模型的优化设计方法,将试验设计、近似建模和探索优化融为有机整体,运用多种优化算法自动搜索设计空间得到优化方案,缩短研制周期,降低研发成本,在航空、航天、航海等复杂工程领域得到了广泛应用[16]。
代理模型是包含试验设计和近似模型的综合建模技术[8],在水下机器人设计优化中,常用的试验设计方法有全因子设计、部分因子设计、均匀设计、中心组合设计和拉丁超立方设计等[17]。目前比较成熟的近似模型包括多项式响应面模型、多元自适应回归样条模型、Kriging模型、径向基函数模型及支持向量回归模型等[18]。不同代理模型的适用场景不同,从精度和稳定性两方面考虑,径向基函数模型的表现最稳定[19],基于代理模型的优化设计流程如图5所示。

图5 基于代理模型的优化设计流程
3 平面形状对舵翼性能的影响
3.1 平面形状参数定义
舵翼的平面形状设计参数有面积S、展长b、根弦长Cr、梢弦长Ct以及前缘后掠角ΛLE,其参数化表示如图6(a)所示。通过约束部分参数,可获得几种常见的平面形状舵翼,如图6(b)至6(f)所示。
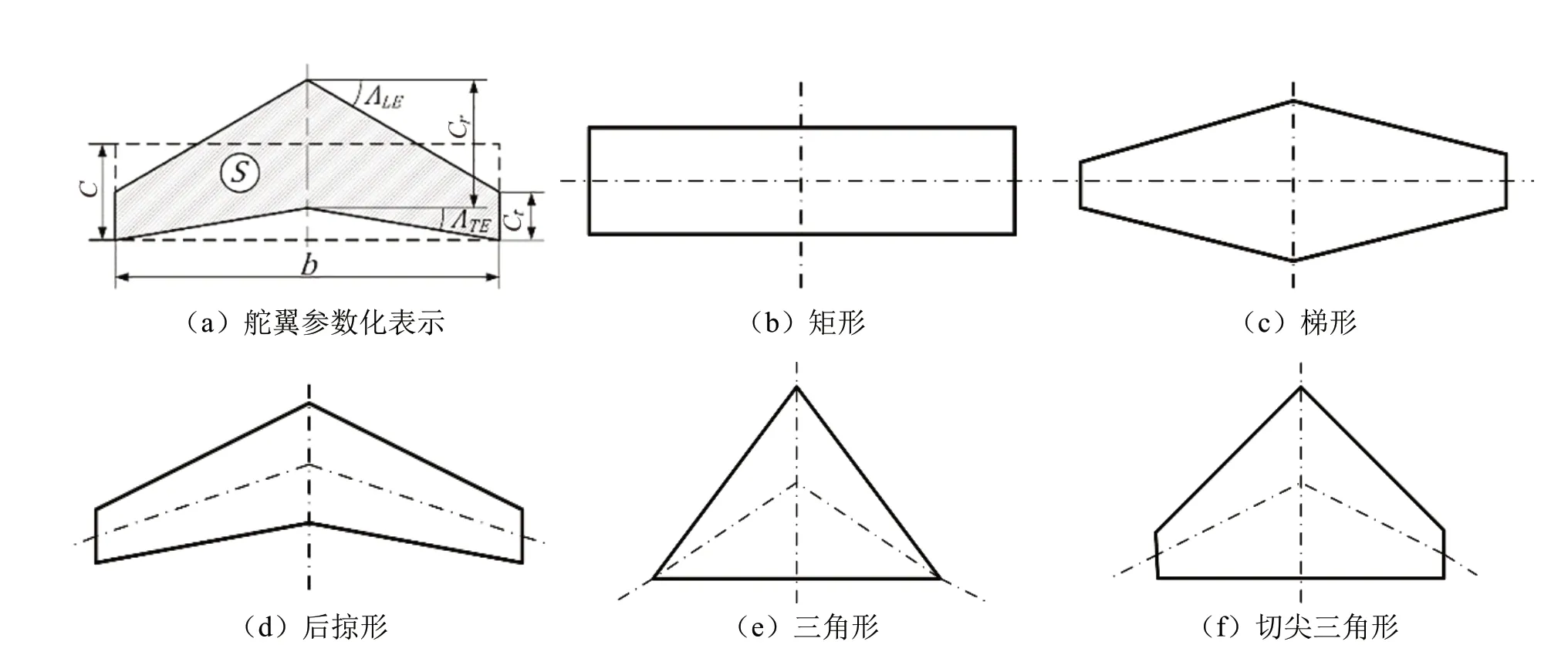
图6 舵翼参数化表示定义及几种常见的平面形状
分析舵翼各参数之间的几何关系得出,当舵翼的面积确定之后,可用展弦比A、梢根比Λ和前缘后掠角ΛLE3个参数确定舵翼的平面形状,参数的定义如表2 所示。

表2 舵翼平面形状参数定义
不同来流下,作用在舵翼上的升力、阻力及舵轴铰链力矩可表示为:
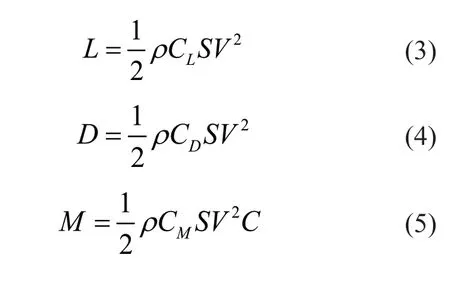
式中:ρ为流体介质的密度;CL为升力系数;CD为阻力系数;CM为铰链力矩系数;S为舵翼的面积;V为来流的流速。
3.2 平面形状参数与舵翼性能之间的关系
舵翼的性能可由其水动力性能的升力系数、阻力系数和升阻比及舵轴的铰链力矩系数大小进行评价,升力系数和升阻比越大,表示舵翼的水动力性能越佳。由文献[5]可得,当舵轴位于距翼型根弦40%弦长处时,铰链力矩系数在各个攻角下都比较小,因此,本文取此处的舵轴铰链力矩系数进行对比,不再单独分析。下文通过控制变量的方法,系统地设计一系列仿真工况,得到平面形状参数与舵翼性能之间的变化规律。
3.2.1 展弦比
根据式(3)至式(5),计算在来流速度为2 kn,攻角为4°,梯形、切尖三角形和后掠形舵翼的梢根比为0.5,且后掠形舵翼的前缘后掠角为18.43°的条件下,展弦比从1~10时的舵翼性能,如图7所示。可以看出,升力系数、阻力系数以及矩形、梯形和后掠形舵翼的升阻比与展弦比呈正相关。三角形和切尖三角形舵翼的升阻比随展弦比增大先增大后减小,其中三角形舵翼的水动力性能稍差与其他平面形状。展弦比的变化对后掠形舵翼的铰链力矩系数有较大影响,随展弦比增大而增大。

图7 展弦比与舵翼性能的关系
3.2.2 梢根比
同样的流场条件下,得到展弦比为8时,梯形、切尖三角形和后掠形舵翼梢根比从0.2~0.8对应的计算结果,如图8所示。可以看出,梢根比对舵翼水动力性能和梯形舵翼的铰链力矩系数的影响较小,后掠形和三角形舵翼铰链力矩系数与梢根比分别呈正相关和负相关。

图8 梢根比与舵翼性能的关系
3.2.3 前缘后掠角
后掠形舵翼的展弦比为8,梢根比为0.5,选取前缘后掠角从0°~45°的10组模型的计算结果如图9所示。可以看出,随前缘后掠角增大,铰链力矩系数迅速增大,升力系数有所降低,升阻比总体呈上升趋势。
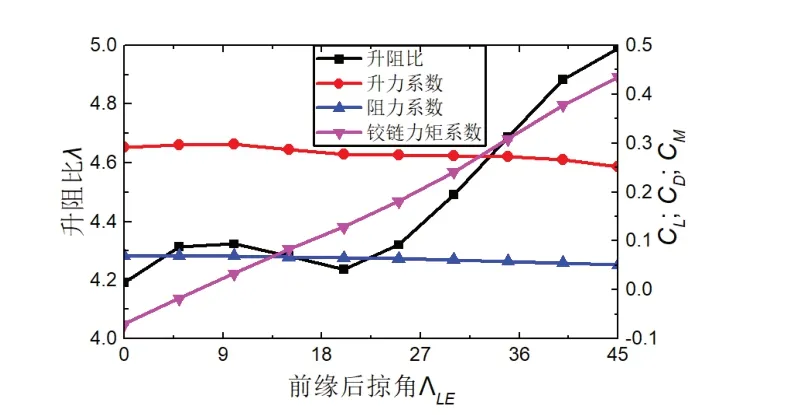
图9 前缘后掠角与舵翼性能的关系
3.2.4 相对灵敏度分析
采用部分因子设计试验方法选取仿真工况,并对计算结果进行二次回归分析,可得舵翼平面形状参数和攻角对其性能的相对灵敏度,如图10所示。根据灵敏度大小可知,舵翼的升力系数和阻力系数对攻角、展弦比比较敏感;升阻比对攻角、前缘后掠角比较敏感;舵轴铰链力矩系数对前缘后掠角、展弦比比较敏感。因此,可根据舵翼设计目标首先对敏感变量进行分析,比如为了获取高升阻比舵翼外形,应首先确定攻角和前缘后掠角的取值。

图10 舵翼平面形状参数的相对灵敏度
3.3 基于RBF代理模型的优化结果分析
本文选择径向基函数模型(RBF)对部分因子设计的计算结果进行拟合,得到代理模型拟合优度R2均大于0.99,满足工程设计优化要求。以升力系数和升阻比最大为目标函数,加权系数为0.5,采用NSGA-Ⅱ算法和序列二次规划算法进行组合优化求解,得到基于RBF代理模型的不同平面形状舵翼设计优化结果和STAR-CCM+中计算验证结果,如表3所示。可以看到,CFD值和优化值的最大误差不超过4%,与后掠形试验模型相比,优化的后掠形舵翼的升力系数提高了6.92%,升阻比提高了24.46%,水动力性能明显提升。矩形、梯形和后掠形舵翼的展弦比相对较大,与3.2.1节结论一致,并且所有舵翼的最佳攻角大小都在6°左右,对平板翼型舵翼的设计具有一定的参考意义。
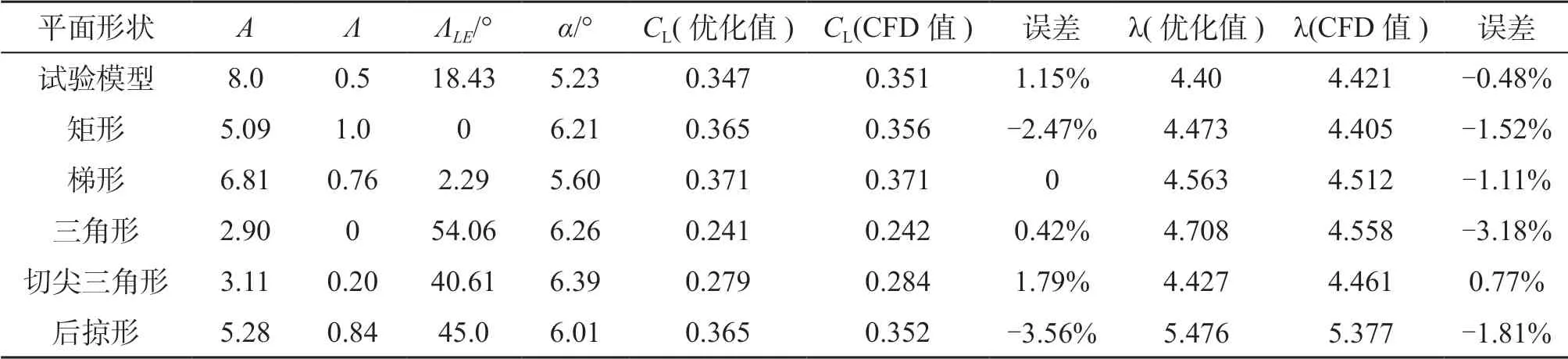
表3 基于RBF代理模型的设计优化结果
优化后不同平面形状舵翼的压力云图与中间剖面的压力分布如表4所示。可以看到,所有舵翼的上表面压力都是负值,其中试验模型、矩形和梯形舵翼的压力值在相对弦长位置为0处逐渐开始上升,形成逆压梯度,直到在后缘出压力达到静默值;三角形、切尖三角形和后掠形舵翼的压力值先有一个明显的下降,然后逐渐上升。所有的舵翼的下表面压力从前缘处开始逐渐下降,直到接近上表面压力的静默值。舵翼上下表面的逆压梯度是影响升力和阻力大小的根本原因。
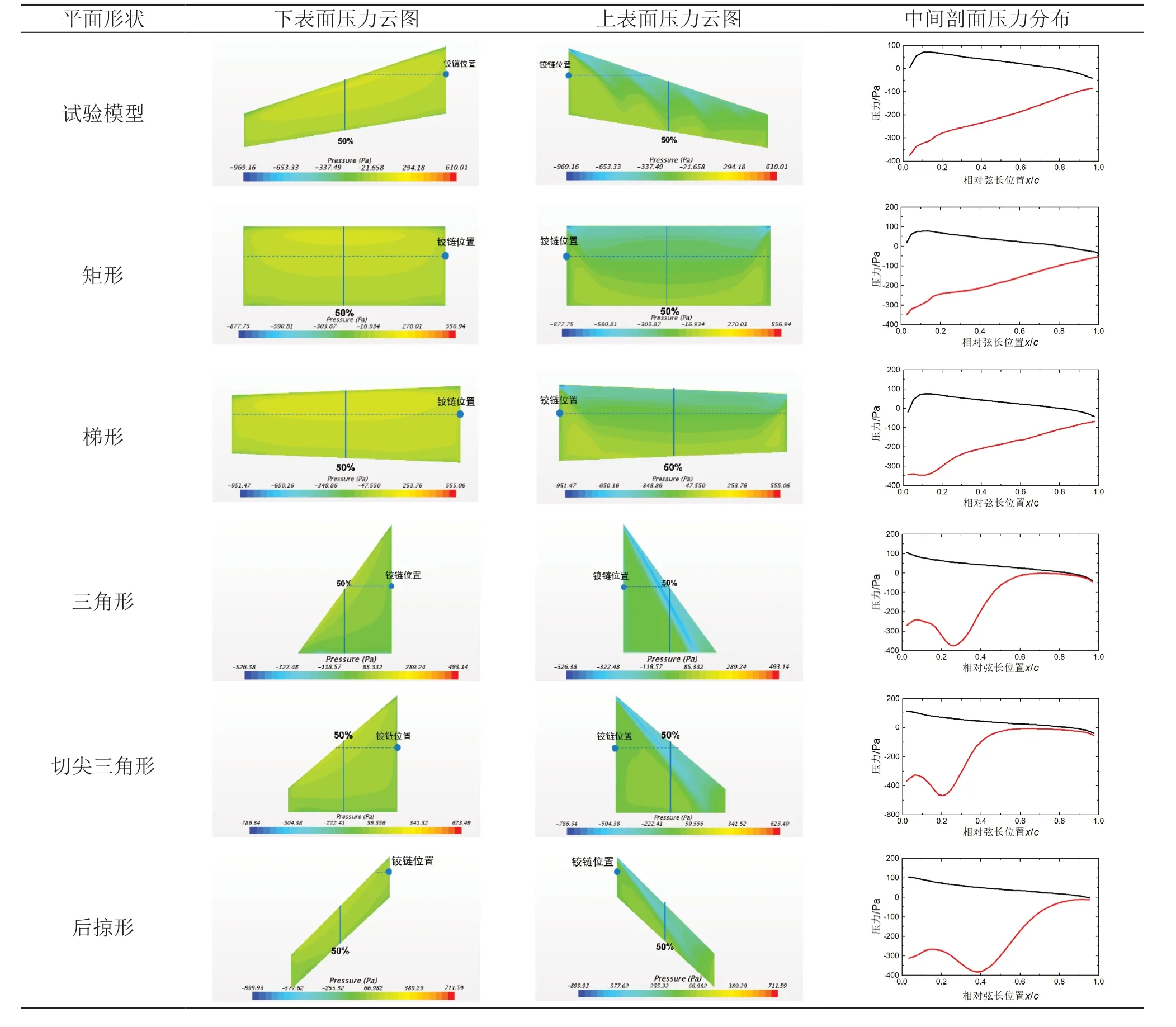
表4 优化后不同平面形状舵翼的压力云图和压力分布图对比
图11所示为优化后不同平面形状舵翼的性能对比,可以看出,后掠形舵翼的水动力性能优于其他形状,但铰链力矩较大;攻角小于12°时,梯形和矩形舵翼表现出较好的水动力性能,并且铰链力矩很小,因此适用于小角度精确操纵场景;攻角大于12°时,切尖三角形和三角形舵翼的水动力性能与后掠形舵翼的水动力基本持平,铰链力矩适中,因此适用于大角度操纵场景。

图11 优化后不同平面形状舵翼的性能对比
4 剖面翼型对舵翼性能的影响
4.1 平板翼型厚度
以优化后的后掠形舵翼为基础模型,分析不同平板翼型厚度对舵翼性能的影响,如图12所示。可以看出,平板翼型的厚度对升力系数、铰链力矩系数影响较小,阻力系数随厚度增大而增大,所以相同攻角下,舵翼的升阻比与厚度呈负相关。

图12 平板厚度对舵翼性能的影响
4.2 NACA翼型
NACA00xx系列对称翼型是NACA最早建立的低速系列对称翼型[20],其中,00表示翼型最大弯度为0,最大弯度位置在始于前缘处,xx表示翼型相对厚度(翼型最大厚度相对于弦长的百分数),也是水下机器人舵翼常用翼型之一。
以优化后的梯形和后掠形舵翼为基础模型,对比分析平板翼型和NACA00xx系列翼型对舵翼性能的影响,如图13和图14所示。从图中可以看出,舵翼最大升阻比与翼型厚度呈负相关,升阻比和最大铰链力矩系数极值点对应的攻角与翼型厚度呈正相关,并且翼型厚度越小,极值点后的衰减速度越快;当平板翼型铰链力矩系数大于NACA翼型时,铰链力矩系数绝对值与翼型厚度呈负相关,反之,铰链力矩系数绝对值与翼型厚度呈正相关,但变化幅度不大。与平板翼型相比,0°~8°攻角范围内,尽管NACA00xx系列翼型产生的升力系数略小,但其阻力系数明显降低,水动力性能有显著提升;攻角大于8°时,因流场情况较为复杂,需根据实际情况具体分析。

图13 NACA翼型对后掠形舵翼性能的影响

图14 NACA翼型对梯形舵翼性能的影响
5 结 论
本文以某型水下机器人舵翼为研究对象,将舵翼表征量简化为5个设计参数,通过计算流体动力学(CFD)和基于代理模型的优化方法(SBO),对舵翼平面形状和剖面翼型与舵翼性能之间的关系展开研究并得到优化后的舵翼特征参数。主要研究结论如下:(1)利用STAR-CCM+软件模拟了流速为2 kn时,舵翼在不同来流下的流场情况,通过小型拖曳水池试验验证了数值计算方法的准确性;(2)采用控制单一变量的方法,系统地设计一系列仿真工况,获得了舵翼平面形状参数和剖面翼型与其水动力性能和距根弦前缘40%弦长处的铰链力矩之间的变化规律和相对灵敏度;(3)以升力系数和升阻比最大为目标函数,基于RBF代理模型得到常见平面形状舵翼的优化结果,并对不同形状舵翼的性能特点和适用场景进行对比分析,对水下机器人舵翼设计优化具有一定借鉴意义。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
空间科学学报(2020年4期)2020-04-22
民用飞机设计与研究(2019年2期)2019-08-05
科学Fans(2019年4期)2019-04-30
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
北京航空航天大学学报(2016年3期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
