
漂流式波浪浮标及其在西北太平洋的观测应用
2021-11-02 11:55任国庆程天宜陈朝晖
海洋技术学报 2021年4期
任国庆,程天宜,马 昕 ,亓 琳,陈朝晖,,江 帆,温 琦
(1. 中国海洋大学海洋高等研究院,山东 青岛266100;2. 中国海洋大学物理海洋教育部重点实验室,山东 青岛266100;3. 中国海洋大学信息科学与工程学院,山东 青岛266100;4. 青岛海研电子有限公司,山东 青岛266100)
在海洋科学研究、海洋工程建设、海洋灾害预防和航海安全等领域,海浪是重要且复杂的一种海洋气象要素。现场观测是最主要也是最直接了解波浪的方法之一[1],其观测手段较为多样,通常主要分为人工目测、仪器定点测量和遥感反演3大类[2-3]。
近年来,随着海浪观测技术的不断发展,目前已经形成了较为完善的观测体系[4]。但是,在实际的观测应用中,现有的几种观测手段仍存在一些待解决问题。人工目测海浪是最为传统的波浪观测技术,人工测波的准确性严重依赖于观察者的技能和经验[5],还极易受到天气条件和光照等因素影响,存在潜在的主观误差;而且基于船基或岸基的波浪观测时空分布不均匀,对远离航运路线区域的测量严重不足,比如南大洋和北极亚极地区域[5-6]。定点式的测波仪器包括测波杆、压力式测波仪、声学测波仪和锚系浮标等,这些观测仪器均可以实现长期无人值守的连续观测。但测波杆、压力式测波仪和声学测波仪只有波高和周期数据,没有波向数据,并且在恶劣海况的影响下,容易对测量结果产生较大误差。而锚系浮标作为目前最为广泛应用的仪器,虽然可以不受水深影响,解析精度高且能够长期观测,但结构复杂并且价格昂贵,同时体积、重量较大,在现场观测使用中,布放困难,后期的维护精力和费用极高,很难大范围观测应用。遥感反演测波包括雷达式测波、卫星高度计测波、海洋波谱仪测波和摄影照相测波等,可以实现大范围的海洋波浪观测[7],能够在没有人工和仪器观测数据的区域以及极端条件下进行采样。但同样易受光照条件和自然天气的影响,导致波浪测量的准确度欠佳[8]。此外,大多遥感观测方式没有波向数据,并且测量结果仍需要现场观测进行修正。
以上观测方式各有其观测缺陷,导致目前在全球深海大洋的高精度、高分辨率观测资料还相对匮乏,因此,发展一种高精度、低成本,便于投放和数据获取的现场观测仪器就显得十分必要[9]。本文主要设计了一种新型漂流式波浪浮标,采用高精度惯性导航模块作为测量元件,采用32位ARM(Advanced RISC Machine)处理器进行数据处理,搭载通讯模块;浮标整体体积小、成本低,可实现对海浪的长期、大范围、高精度观测。在2019年西北太平洋航次中,我们利用该浮标进行了观测应用,取得了良好的测量结果,对西北太平洋黑潮延伸体海区和日本海区域海浪的有效波高、周期等波浪要素的时空变化特征进行了详细分析。
1 漂流式波浪浮标介绍
本文采用的漂流式波浪浮标是中国海洋大学物理海洋教育部重点实验室与青岛海研电子有限公司联合自主研发的观测设备(图1),可采用随海流漂流观测或定点测量的方式观测海面波高、波周期、波向、流速、海表温度以及气压等要素,其特点在于重量轻、体积小、测量精度高,适用于大面积、多方式投放进行波浪观测。其核心测量元件采用高精度九轴传感器,可同时高频获取三轴加速度、角加速度、欧拉角、地磁数据;测量数据通过基于ARM构架的高效处理器,进行数据反演获取波浪的各要素(包括有效波高、有效波周期、波向等);现场数据可以通过铱星/北斗/4G/短波通讯等方式实时回传。浮标标体直径40 cm,总重量11 kg浮标电池电量可支持180天的观测。

图1 漂流式波浪浮标
1.1 系统硬件结构及功能
漂流式波浪浮标硬件系统主要由主控电路、高性能惯性导航和定位模块、通信模块三部分组成。
1.1.1 主控电路
主控电路采用意法半导体(STMicroelectronics)公司推出的STM32F103ZET6作为主控芯片,它是一种嵌入式—微控制器的集成电路,是该公司开发的STM32F1系列的一种。该电路使用高性能 ARM Cortex TM-M332位的RISC内核[10],工作频率为72 MHz,内置高速存储器(高达512 kB的闪存和64 kB的SRAM),以及丰富的增强I/O端口和连接到两条APB总线的外设,包含2个12位的ADC、3个通用16位定时器和1个PWM定时器,还包含标准和先进的通信接口:2个I2C接口,3个SPI接口、5个 USART接口、1个USB接口和1个CAN接口,见图2,其工作电压为2.0~3.6 V,工作温度范围-40~85℃。
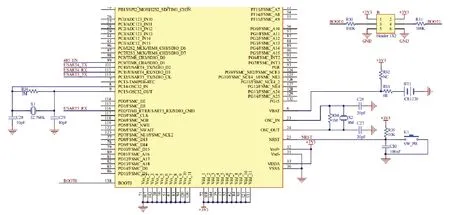
图2 主控电路图
1.1.2 高精度惯性导航和定位模块
高精度惯性导航模块采用法国SBG公司生产的Ellipse2-A系列产品,集成高精度的陀螺仪、加速度计、地磁场传感器,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态。采用先进的数字滤波技术,能有效降低测量噪声,提高测量精度。内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度0.05°,稳定性极高。
GPS定位模块采用NEO-6M-GPS模块,具有高灵敏度、低功耗、小型化特点,其极高的追踪灵敏度大大扩大了定位的覆盖面,非常适用于小型漂流式观测平台移动定位系统。
1.1.3 通信模块
漂流式波浪浮标根据应用环境,支持GPRS、铱星、北斗3种通信方式,根据布放位置和观测区域,选择相应的通信方式。其中,近岸一般采用GPRS通信方式;在深远海区域,选择北斗通信方式;在北斗无法覆盖的区域,选择铱星通信方式。
GPRS模块采用5模12频的USR-LTE-7S4通信模块,支持移动、联通、电信4G高速接入,同时支持移动、联通3G和2G接入,便于嵌入式 Linux 系统开发,具有高度可靠性;具有RNDIS 远程网络驱动接口,可通过电脑USB连接该设备访问互联网,支持4个网络连接同时在线,支持TCP和UDP;每路连接支持 10 kB 串口数据缓存,连接异常时可选择缓存数据不丢失,还具有远程短信设置模块参数功能,图3为GPRS电路图。
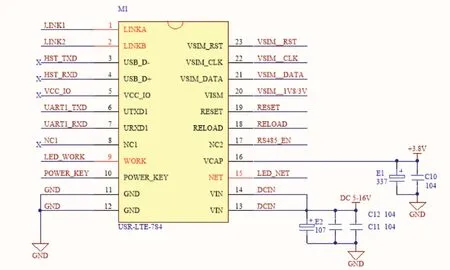
图3 GPRS电路图
铱星通信模块(见图4)采用9602模块,体积相对较小,模块低功耗,应用功能具有灵活性;模块使用RS232数据通讯接口,方便与用户控制端对接;模块采用MMCX天线接口,可使用简单的AT命令接口。
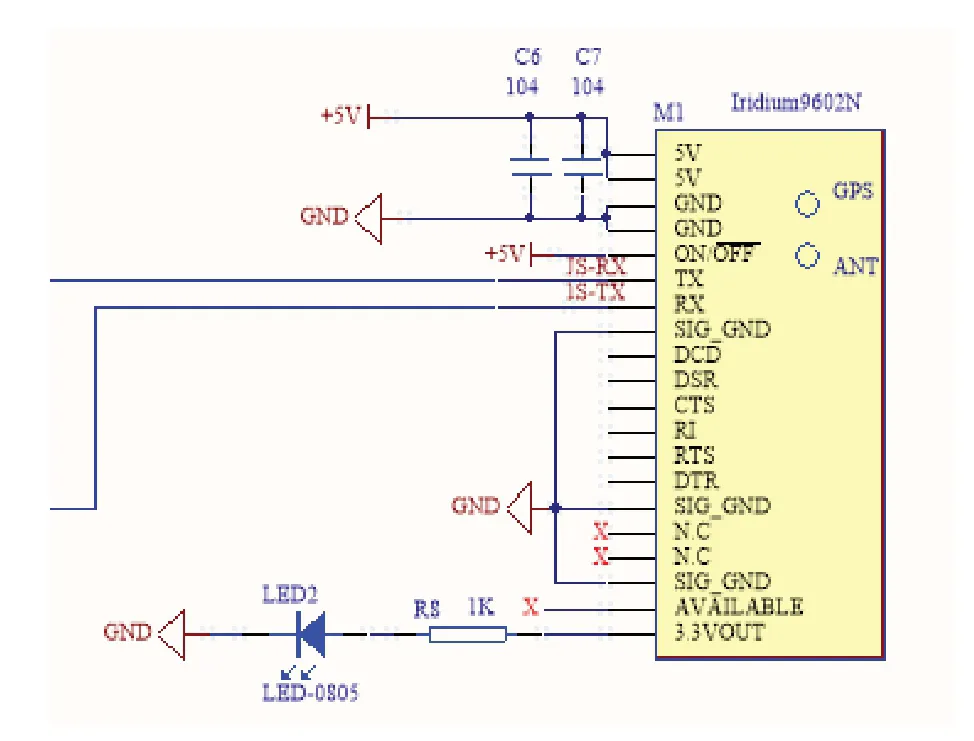
图4 铱星通信模块
北斗通信模块(图5)采用BDM910型支持北斗RDSS/RNSS功能的双模模块。模块内部集成了高性能RDSS 射频收发芯片、输出功率10W的功放模块、北斗专用RDSS基带电路以及一款国产 BD2 B1/GPS L1 小型化导航定位模块,可实现RDSS定位、通信和RNSS导航定位等功能。模块内置两路LNA,其中一路LNA为S频点,可对RDSS卫星信号进行滤波,低噪声放大,无需外置LNA,直接连接无源天线即可。

图5 北斗电路图
1.2 系统数据采集与处理
浮标内置的惯性测量单元输出的九轴数据通过浮标内部的ARM处理器进行波浪参数的采集和解算。在漂流浮标具有较好随波性的假设下,本文将加速度二次积分得到的位移作为波面水质点的位移,从而计算波高、波向等波浪参数。
由于需要求解浮标在地理坐标系下的运动状态,而惯性测量单元的直接输出是在其设备坐标系下的,因此,需要首先利用内置的陀螺仪模块数据进行坐标系转换。陀螺仪传感器可输出相对于地理坐标系3个轴转动的角度,表示的是载体姿态角,包括滚转角γ、俯仰角θ、偏航角φ,称为欧拉转动角,分别对应于陀螺仪x轴、y轴与z轴的角度输出。通过3次连续转动描述从地理坐标系到载体坐标系的变换。转动的顺序由不同的硬件厂商规定,本文所采用设备的转动顺序为z—y—x。
绕坐标轴的旋转可以使用旋转矩阵进行描述,将3次旋转的旋转矩阵相乘便得到完整的旋转矩阵。从地理坐标系到载体坐标系的坐标变化可表示为:

式 中,po=[xo,yo,zo]T和pw=[xw,yw,zw]T分别是载体坐标系和地理坐标系下的坐标;R=RxRyRz是总的旋转矩阵;Rx、Ry、Rz分别是绕3个坐标轴的旋转矩阵。由旋转角度易得旋转矩阵,每个旋转矩阵不在此列出,仅列出总的旋转矩阵:

R矩阵是从地理坐标系到载体坐标系的转换矩阵,我们需要得到从载体坐标系到地理坐标系的转换矩阵:

已知惯性测量单元中的加速度计在载体坐标系下的三轴加速度分量,则通过左乘该旋转矩阵,得到地理坐标系下的分量:

因此,地理坐标系下的垂直于海平面方向的加速度为:

由垂直方向的加速度,可以通过积分运算得到垂直方向的位移。设加速度信号为a(t),由位移、加速度和速度之间的关系可得:

由于在加速度传感器获取数据的过程中,实际获得的信号会不可避免地含有噪声,在经过两次积分后,通过去除趋势项的操作降低低频噪声。
在得到垂直方向的位移数据后,通过提取位移曲线的上跨零点划分出每个周期的位移数据,从而能够计算波高、波周期等要素信息。
1.3 与波浪骑士浮标比对
本文的漂流式波浪浮标于2018年11月初在山东省烟台市芝罘岛海域,与自然资源部北海分局烟台中心站布放在该海区的波浪骑士浮标(荷兰DataWell MKIII)进行了比对测试,其中波高数据基本接近,而部分时段波周期存在较大差异,这主要是因为两种浮标自重和观测原理有所差异,波浪骑士浮标以锚系观测为主,自重较大,而本文的漂流波浪浮标自重较小,随波性要好于波浪骑士浮标,因此,两者在波周期观测上会产生差异,属正常范围内情况。比对测试结果表明两种浮标观测数据和变化趋势较为一致(图6)。此外,2018年9月,漂流式波浪浮标的核心波浪传感器通过了国家海洋标准计量中心的计量认证,进一步表明漂流式波浪浮标观测的有效性和准确性。
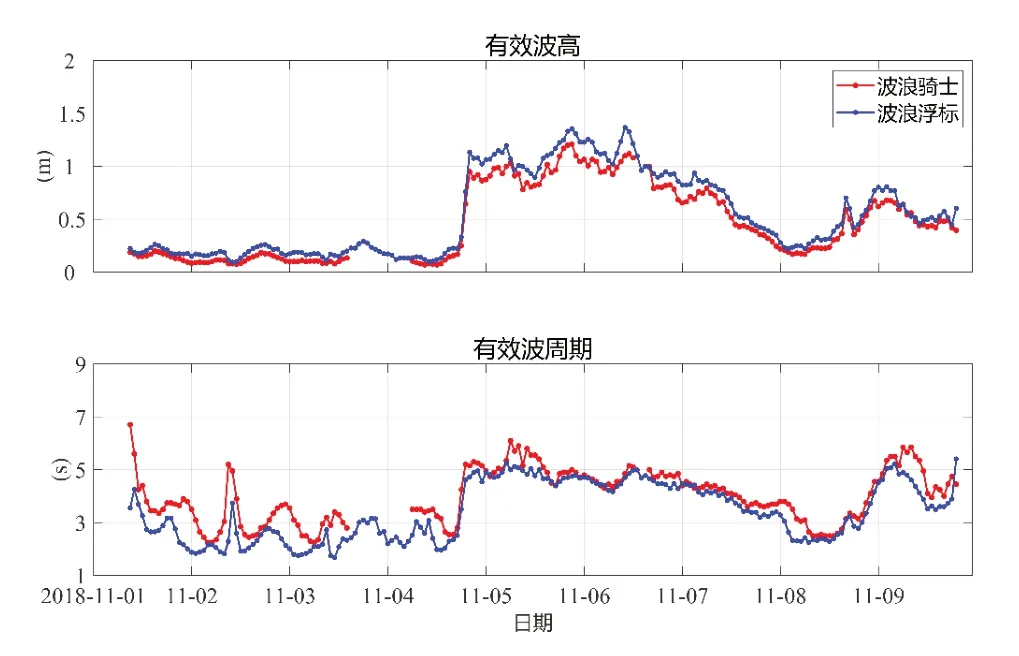
图6 漂流式波浪浮标和波浪骑士测量的波高和 波周期时间序列对比
2 西北太平洋观测应用研究
2.1 布放位置和采样情况
本文的漂流式波浪浮标,于2019年9月搭载“东方红3”船的西北太平洋黑潮延伸体科考航次,在日本海和西北太平洋黑潮延伸体海域共布放了10枚浮标,获取了大量的现场数据。
本文所利用的10套漂流式波浪浮标中,WB160/WB163为投放在日本海的两套浮标,WB161和WB162为投放在位于西北太平洋黑潮延伸体海域的两个锚系浮标KEO和CKEO附近的浮标,WB164/WB165/WB166/WB167/WB168/WB169为投放在黑潮延伸体海域一个暖涡中的一组浮标,其中WB164位于暖涡中心,WB168位于暖涡外缘。
该浮标每30分钟进行一次观测,输出变量包括:时间、经度、纬度、1/3波高、1/3波周期、1/10波高、1/10波周期、最大波高、最大波周期、平均波高、平均波周期、涌浪波高、涌浪波周期、波向。浮标的设计预估工作时长为180天,实际受具体海况的影响,目前最长工作时间可达232天(表1),工作期间浮标的采样和数据传输性能保持良好。具体位置信息如表1所示。

表1 漂流式波浪浮标的详细信息
2.2 日本海的波浪观测应用
利用投放在日本海的漂流式波浪浮标的观测结果,本文对2019年9—10月日本海东南部的波浪时空特征进行了刻画。每年9月至11月为西太平洋和日本海的台风高发季,有效波高值受台风影响显著。投放于日本海的1套漂流式波浪浮标在表层海流的作用下整体向南运动,于2019年10月在135.1°E、35.8°N附近丢失,期间呈现出明显的惯性震荡特征。图7(a)和图7(b)为2019年9月14日至2019年10月12日所测得的有效波高和有效波周期的时间序列。日本海南部有效波高平均值约为1.59 m,平均波周期约为5.97 s,有效波高和有效波周期的变化趋势基本一致,均在2019年9月23日、10月3日及10月12日左右出现较大波动,波高和周期都在一天之内出现了大幅度增长。

图7 日本海投放的漂流式波浪浮标WB163(J1a)
上述极值波高的出现与过境台风等极端天气密切相关,2019年9月23日,波浪浮标在经过136.7°E、38.4°N附近时,有效波高和有效波周期出现较大增长,这主要是因为遭遇了2019年17号台风塔巴,浮标所在位置位于台风塔巴的七级风圈内。10月12日,浮标运动到了日本沿岸,受2019年19号台风海贝斯的影响,在日本沿岸产生了7.5 m左右的波高。由此可见,在日本海东南部,台风天气会使有效波高出现较均值4至5倍的增长。
2.3 西北太平洋黑潮延伸体海域的波浪观测应用
西北太平洋的浮标WB165、WB166、WB167、WB168、WB169投放于黑潮延伸体海域的一个暖涡中,WB161投放于一个锚系浮标附近。暖涡中的一组浮标起初围绕涡旋运动,脱离涡旋后随海流向东运动,另外,暖涡中不同位置的有效波高(有效波周期)具有较为一致的变化趋势,见图8(a)和图8(b)。西北太平洋的有效波高平均约为2.28 m,较日本海高出0.69 m;平均有效波周期在8.15 s左右,比日本海高2.18 s。有效波高的大小主要取决于风速、风时和风区,假设黑潮延伸体海域和日本海风作用的时间相同,黑潮延伸体海域的风速并未显著高于日本海的风速,甚至在150°E—166°E,32°N—42°N海域的风速小于日本海,因此,风速大小不是造成黑潮延伸体海域波高较高的原因,而是因为黑潮延伸体海域具有更为广阔的风区,这给波浪成长提供了充足的空间,而且其他海域的涌浪可以不受阻碍传播至此,与当地的风浪波高叠加,从而导致该海区的有效波高均值高于日本海。
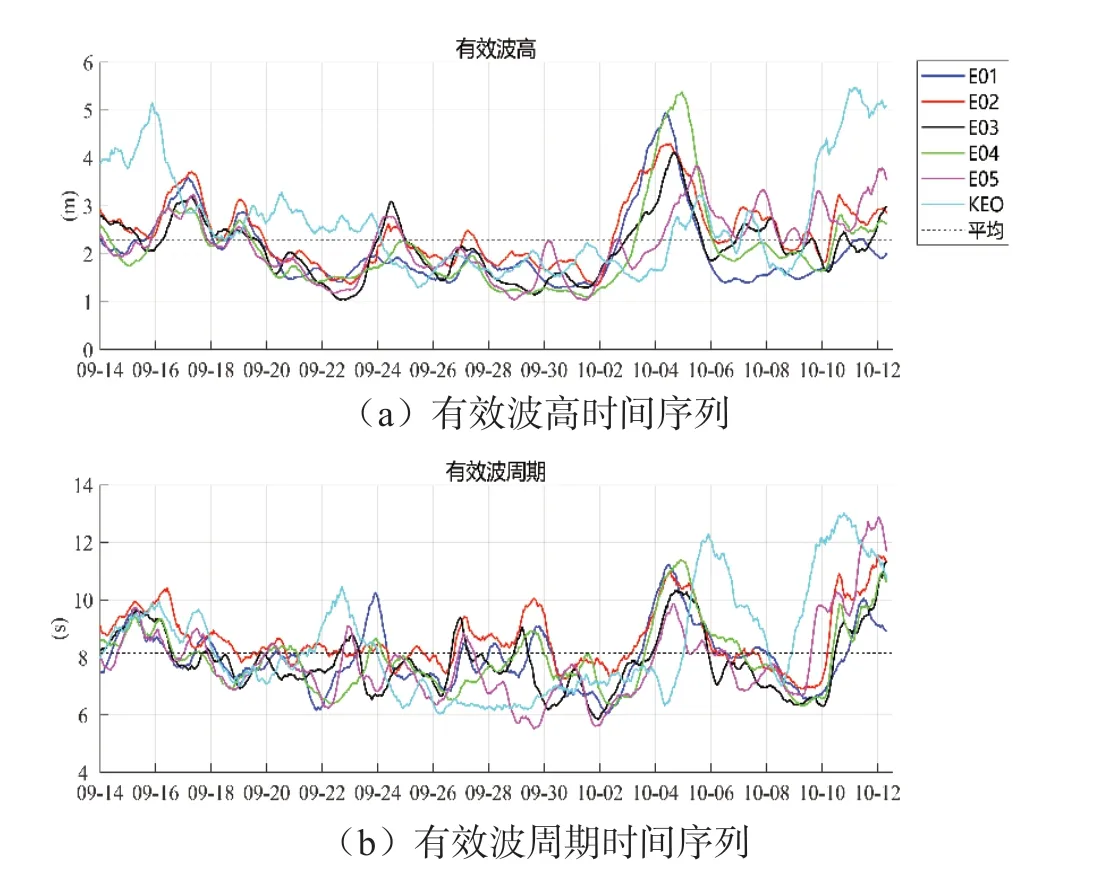
图8 黑潮延伸体海区投放的六套漂流式浮标
综上所述,9—10月日本海的平均有效波高为1.59 m,黑潮延伸体海域为2.28 m。如遇台风等极端天气,有效波高可达到6—8 m,当有效波高迅速增加时,有效波周期也会随之增大。黑潮延伸体海域由于具有广阔的风区,为波浪成长提供了充足的空间,加之其他海域的涌浪可以不受阻碍传播至此,与当地的风浪波高叠加,致使该海区9—10月的有效波高较日本海高出0.69 m。
3 结 论
本文所研究的漂流式波浪浮标,是一种高精度、低成本、便于投放和数据获取的现场观测仪器。利用漂流式波浪浮标可以获取高时空分辨率和高精度的海浪观测资料,将其应用于大面积的海浪观测中,可以有效填补深海大洋缺乏高精度现场海浪观测资料的空白,具有很高的科研价值和良好的经济效益。
本文以漂流式波浪浮标的观测为主,在西北太平洋黑潮延伸体海域和日本海进行了观测应用。由于西北太平洋黑潮延伸体海域具有更广阔的风区,加之其他海域的涌浪可以不受阻碍地传播到这里,并与当地风浪相叠加,导致该海域9—10月的有效波高高于日本海,平均波高约高出43%,平均波周期约高出37%。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
海洋通报(2021年3期)2021-08-14
舰船电子工程(2021年5期)2021-06-04
垂钓(2019年2期)2019-09-10
土木建筑与环境工程(2019年6期)2019-02-02
水能经济(2017年6期)2017-10-19
现代兵器(2017年7期)2017-08-18
