
多波束表层声速装置极地环境下应用案例分析
2021-11-02 11:54袁东方王硕仁陈清满
海洋技术学报 2021年4期
袁东方,王硕仁,朱 兵,陈清满
(中国极地研究中心,上海 200136)
“雪龙”号极地科考破冰船是我国继“向阳红10”号、“极地”号之后的第3代极地考察船,原系乌克兰赫尔松船厂1993年建造的一艘具有B1级破冰能力的破冰船,1993年购进后改装为极地考察船。1994年,“雪龙”号首航南极,先后执行了22次南极考察和10次北极科学考察,是我国专门从事极地科学考察的破冰船。“雪龙”号经过4次较大规模的改造,更新和加装了甲板机械设备、鱼探仪、船载ADCP、CTD等探测、采样和作业设备,新增了表层走航供水和基础环境参数观测设备,新建了船上物理、化学、生物和地质等多个实验室,基本具备了极地海洋环境观测和考察能力,已成为目前国际上最为重要的极地科考破冰船之一。但是“雪龙”船长期以来没有加装深水多波束测量系统,鉴于海底地形地貌探测在科学研究、资源调查等领域的广泛应用,深水多波束测量系统已成为现代科学考察船船底声学设备的标配,见表1。

表1 国内外科考船使用多波束对比表
“雪龙”号现有情况已无法满足当前我国极地科考对考察船的需求,而近年来国际上多波束测量技术已有很大提高,换能器体积已有明显减少,加装多波束测量系统对船底的开口面积和对船底结构的影响也在减少,这也增加了“雪龙”号加装深水多波束测量系统的可行性。2017年6月,“雪龙”号进行深水多波束测量系统加装工程,型号为Seabeam3020,同年7月参加中国第8次北极科学考察,多波束测量总航程达到 17760 km,多波束海底地形覆盖面积约 68100 km2,这也是国内首套破冰型深水多波束系统在极地应用[1-2]。中国第34次南极考察过程中,在罗斯海多波束测量总航程达到4260 km,地形覆盖面积约6000 km2;首次在阿蒙森海陆架区进行多波束测量,总里程达2200 km,地形覆盖面积约1800 km2[3-4]。
在多波束系统中,表层声速对多波束测深具有重要意义。由于多波束测深的特点,朱小辰[5]、董庆亮[6]、刘胜旋[7]等进行了研究,表层声速会影响到多波束指向角,微小的表层声速差异可能会带来归算水深较大的误差,也会导致多波束回波呈现眉毛状或笑脸状失真。由于测区表层声速测量的实时性和不可重获性,对多波束线型接收换能器而言,必须保证在多波束测量过程中能够获取连续可靠的表层声速[8-9]。
由于“雪龙”号是首次搭载多波束测深系统并在南北极冰区进行应用,在设计和使用时经验不足,表层声速获取装置的结构设计虽然进行了优化,但是在实际应用中仍然存在一定的问题。本文通过表层声速装置在极地现场的应用案例,介绍了表层声速装置存在的问题以及改进方法,可为以后破冰船多波束测深系统的设计提供经验。
1 系统介绍
“雪龙”号搭载的SeaBeam3020 冰区保护型深水多波束系统是ELAC(Wärtsilä ELAC Nautik GmbH)公司的最新一代破冰船专用多波束测深系统。该系统采用先进的波束扫描专利技术,可以补偿艏摇、纵摇和横摇运动。
为了适应破冰船的破冰作业要求,Sea-Beam3020系统将ELAC公司的专利技术——高分子聚合材料透声板技术集成到发射、接收换能器上,即发射、接收换能器均为冰区强化保护换能器,可以直接安装在船底而无需额外加装透声板,换能器构造坚固,能满足极区低温冰雪环境要求,不影响船舶的破冰性能。既简化了安装程序和结构,又能有效避免碎冰对换能器的损害。集成高分子聚合材料的换能器声源级损失仅为2 dB左右,最大限度地保证了系统的声学性能。
Seabeam3020多波束系统使用英国Valeport公司生产的miniSVP声速传感器。技术特点是传感器体积小,同时能够提供高分辨率、高精度声速数据。Valeport声速计由电路板、陶瓷换能器、信号反射器和控制路径长度的间隔棒组成,两者由一根同轴电缆连接。可以安装钛外壳,提供深度超过6000 m的防水保护,如图1所示。表层声速计一般安装在船底,和多波束换能器在一个平面上,以测得换能器平面处实时的表层声速数据,为多波束提供实时表层数据,保证多波束指向准确性。
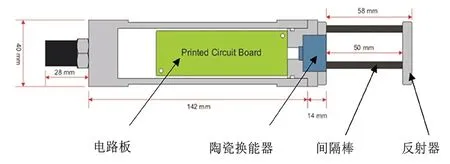
图1 表层声速计结构图
2 竖井结构设计及应用
2.1 结构设计
表层声速计由于需要与换能器处于同一个平面上,在船舶设计上需要安装在船底。科考船表层声速计有两种安装方式,第一种一般固定安装在船底或多波束封板内,部分结构会突出船体,这样的安装方式导致表层声速计维护保养困难,会受到海草、淤泥或者海生物附着,或者受外力撞击损坏,导致表层声速数据误差较大,且维护保养需要进坞才能完成,工程量大。第二种表层声速计安装方式采用了竖井式结构,在船体从上到下安装一个竖井结构,上端开口高出吃水线3~4 m,下端开口在换能器附近并配备有格栅和底座,表层声速计就放在竖井内,测量声速的装置突出船体,可以实时测量换能器表面声速,维护保养时可将表层声速计拉出,工作量小。
由于“雪龙”号需要经常航行在浮冰区并进行破冰作业,船底经常有浮冰划过,固定式安装弊端较大,故不采用这种方式。为了保护表层声速计正常工作,“雪龙”号采用了竖井式安装结构,在FR50+550(50号肋位前部550 mm)处安装竖井结构,贯穿下甲板、内底和底舱,如图2所示。在竖井井道下端增加了底座和保护格栅,防止碎冰进入井道对表层声速计造成破坏,如图3所示。
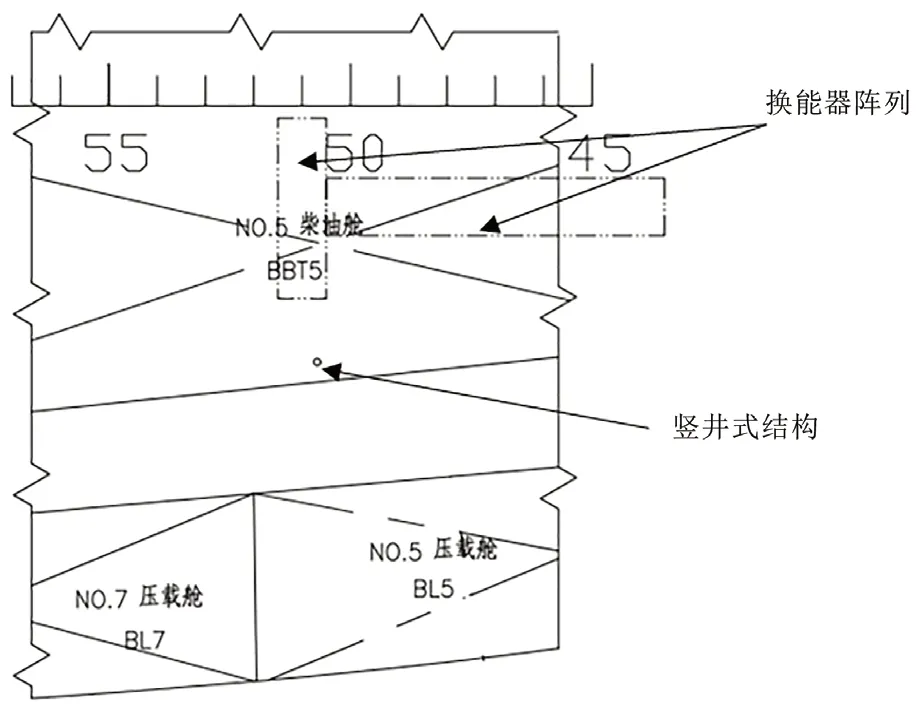
图2 表层声速计竖井位置

图3 表层声速计安装图
2.2 现场应用
“雪龙”号搭载的多波束系统是我国首套破冰型多波束,也是我国首次在极地冰区使用多波束进行地形地貌的测量,在设计和应用方面都没有经验可循。随着“雪龙”号执行中国第8次北极科学考察以及第34次南极科学考察任务,在现场使用中逐渐发现竖井式表层声速计安装结构存在一些缺陷,这种结构在极地冰区应用中存在很大的问题。
(1)在中国第8次北极科学考察过程中,“雪龙”号穿越北极中央航道时,航行区域浮冰密集度达80%以上,由于未在作业区域多波束测量系统未开启[1]。由于浮冰密集,“雪龙”号连续破冰前行,不断有浮冰进入到竖井内,并在井道内冻结,导致表层声速计无法下放到竖井底部,无法获取表层海水的实时数据。
(2)在中国第34次南极考察过程中,“雪龙”号在罗斯海海域超过80%密集浮冰区航行过程中[10-11],由于竖井内冰块冻结和挤压,冰柱一直从船底堆至井道上部,并有部分冰柱高出井道上沿部分,如图4(a)。随着“雪龙”号破冰时上下震动,在特定情况下竖井内的冰块就会被顶出井道,像“活塞”一样,将水从井道内抽出,导致表层声速计房间进水结冰,如图4(b),这也是在极地环境下发生的特殊情况。在南北极密集浮冰区以及西风带等恶劣海况下,船上实验室需要将表层声速计从竖井内拉出,用盲板法兰将井道上口密封,如图4(c)。
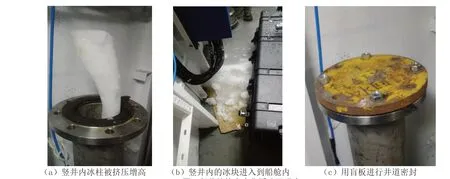
图4 竖井结构在密集浮冰区进水
(3)在多波束作业过程中,海面浮冰密集度较低,基本处于敞水区域,但是在测线上仍然有零星浮冰,此时“雪龙”号会选择直接破冰,避免船舶偏航对多波束测线造成影响。“雪龙”号撞击浮冰后,产生大量的细小冰粒会随着船底往后漂移,进入竖井内,分布在表层声速计换能器与反射板之间,由于细小冰粒的侵入,造成表层声速计产生错误报警,进而影响多波束地形数据的精确度。
3 升级改造
3.1 原因分析
“雪龙”号加装多波束系统时进行了冰池试验,以验证浮冰、气泡等因素对多波束系统的影响。根据天津大学冰池试验报告,以“雪龙”号科考船在碎冰航道中航行,航速3 kn、冰厚1.0 m为例。模型试验中的船模航速为0.244 m/s,冰厚为2.5 cm。在船模行进过程中,通过船底下方水下摄像机所记录的视频文件可以发现,碎冰航道条件下低速航行中,由船首下潜滑移至船底的碎冰块约占5%[12]。冰池试验只记录了可视破碎浮冰,在实际破冰过程中,随着浮冰被船首压碎,还会产生大量细小微粒,散布在海水中,这些细小微粒会影响表层声速仪数据的准确性,如图5所示。

图5 冰池实验中模型船底浮冰漂移路线
通过冰池试验中浮冰的运行路线以及在极地实际应用中的现象分析,可以看出表层声速计竖井式结构在浮冰区应用存在缺陷。“雪龙”号在破冰过程中产生的细小微粒会影响表层声速计的准确性,同时碎冰还会在井道内堆积、挤压,在特定海况下会被挤压进船舱,导致船舱进水。
3.2 改造方案
表层声速计的竖井式结构缺陷导致多波束系统在极地应用中存在一定的风险,国内多波束系统在极地浮冰区使用尚属首次,缺少相关应用案例。经过对国外科考船应用情况的调查发现,俄罗斯科考破冰船“特列什尼科夫院士”号(Akademik Treshnikov)安装有泵式测量装置,使用SSV3000表层声速装置,以消除浮冰对表层声速的影响。本文通过研究船体结构,设计了SSV3000表层声速测量装置的管路原理图,其原理是利用水泵将换能器附近的水吸入一个泵腔内,泵腔内安装表层声速计,进水口需要安装在接收换能器附近;进水口距离接收换能器水平距离小于1 m,垂向距离小于0.1 m,以此获取表层声速数据,如图6所示[13]。由于表层声速计固定安装在泵腔内,需要接入一路压缩空气,在表层声速计不使用时将泵腔内海水排出,防止表层声速计长时间浸泡在海水中发生海生物附着等情况。
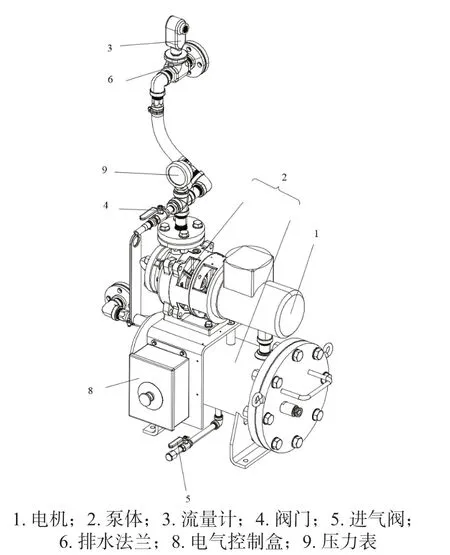
图6 泵式表层声速测量装置结构图
2018年4月,中国第34次南极科学考察返航后,“雪龙”号加装了泵式表层声速测量装置SSV3000,位置在前部泵房、下甲板3层位置,此位置离船底距离近,管路布置长度短,且在极地环境下室内温度较低,利于表层声速装置的数据测量。
3.3 应用及数据对比
新安装的泵式表层声速测量装置在中国第9次北极科学考察中进行了实际应用,在进入北极区域后多波束系统开始记录数据,在浮冰区工作工程中,使用泵式表层声速测量装置进行测量。“雪龙”号在撞击浮冰过程中,SSV3000系统中表层声速计数据正常,没有发生表层声速报警状况,基本消除了“雪龙”号破冰产生的细小冰粒对表层声速的影响。
第9次北极考察过程中,在进行站位作业时,同时使用声速剖面仪进行声速剖面测量[14]。为了验证泵式表层声速测量装置测量数据的准确性,通过对比相同深度附近的声速数据,可以看出泵式表层声速测量装置与声速剖面仪获取的数据基本相同,能够满足多波束对表层声速的要求,见表2。

表2 两种仪器相同深度声速值对比表
声速剖面仪采用AML公司生产的Minos-X自容式数据采集设备,测量深度为6000 m,测量精度为±0.006 m/s。在第9次北极考察过程中,声速剖面仪随着CTD(温盐深仪)一起布放,获取了34个站位的声速剖面数据。
通过对多个站位表层声速和声速剖面仪测量的声速值进行对比,两种仪器的声速基本相同,仅存在较小误差,误差存在的原因除了深度有差别外,泵式表层声速装置中抽取的海水在管路内流动进入船舱后会有略微的温升,影响声速值的计算。经现场多波束系统专业人员进行对比分析,相比于波浪、潮汐等因素造成的影响,这些误差不影响多波束测量数据的准确度,泵式表层声速测量装置满足技术要求。
“雪龙”号在北极楚科奇海深海平原开展了多波束测量,里程达830 km,海底地形覆盖面积约3100 km2[15]。虽然加装了泵式表层声速测量装置SSV3000,但是竖井式结构仍然保留,在南北极敞水区域航行时由于其自身优势仍然会被使用。
4 经验积累
“雪龙”号表层声速计同时有竖井式结构和泵式表层声速测量装置,两套装置都进行了多个航次的现场使用,两套装置具有不同的优缺点,见表3。

表3 两种结构对比表
竖井式结构优点在于结构简单,表层声速计在使用时放入竖井内,不使用时可以从竖井内拉出,放在专用设备箱内存储,基本不需要维护。竖井结构可以在极地和大洋敞水区域正常使用,由于表层声速计安装在换能器附近,可以实时获取准确的表层声速数据。缺点在于在恶劣海况以及密集浮冰区航行时会有浮冰涌入井道,堵塞的浮冰在外力作用下会像活塞一样将海水抽进船舱,在特殊海况下需将上端口用法兰密封,避免井道内冰柱涌入船舱内;多波束作业时船舶若撞到浮冰,产生的细小微粒也会影响表层声速计的数据质量,需要在后期数据处理时格外注意。
泵式表层声速测量装置可以解决多波束在南北极作业时船舶破冰产生的细小微粒的影响,但是其结构复杂,维护工作量大。其原理是用水泵将换能器附近的海水抽到泵腔内,然后表层声速计再进行测量声速,海水从吸口到泵腔需要一段的距离,而装置安装在船舱内,温度一般较高,海水的温度和声速着密切的联系,这就要求管路不能太长以及具有良好的保温功能,避免海水温度升高,影响表层声速的大小[16-18]。
“雪龙2”号破冰船也搭载了SeaBeam3020多波束测量系统,在最初的设计中仍然采用了竖井式结构作为表层声速的测量装置,经过“雪龙”号极地现场的应用后,“雪龙2”号也修改了相关设计,增加了一套SSV3000表层声速测量装置,其多波束系统在中国第36次南极考察以及中国第11次北极考察过程中进行了实际应用,作业区域有少量浮冰,采用泵式表层声速测量装置提供表层声速,在作业过程中表层声速测量准确稳定,没有报警出现[19]。
5 结 论
“雪龙”号搭载了我国第一套破冰型多波束测深系统,并在极地进行了应用,积累了丰富的设计和使用经验,表层声速计装置作为多波束系统的重要组成部分,也在实际应用中进行了升级改造。表层声速计竖井式结构可以在极地敞水区域以及大洋中正常使用,但是在浮冰区使用存在一定的缺陷,影响表层声速数据的测量。泵式表层声速测量装置解决了竖井式结构冰堵问题,消除了破冰产生的冰粒对表层声速计的影响,成为“雪龙”号表层声速数据的主要获取装置。“雪龙”号多波束测深系统的极地使用经验也为“雪龙2”号的表层声速计的设计提供了经验和技术支持,“雪龙2”号建造时在保留竖井式结构的同时,也增加了泵式表层声速测量装置。
随着极地考察的深入,我国将不断建造新的破冰船或特种作业船,而多波束测深系统作为现代科考船的必备设备,也会安装在新的科考船上,希望“雪龙”号表层声速计装置的设计和使用经验能够为以后的破冰船或特种作业船的设计提供参考。
猜你喜欢
疯狂英语·新阅版(2021年6期)2021-07-19
工业设计(2021年5期)2021-06-11
廉政瞭望(2021年11期)2021-03-25
百科知识(2020年3期)2020-02-24
北广人物(2019年46期)2019-12-30
舰船电子工程(2018年11期)2018-11-26
航空世界(2018年12期)2018-07-16
少儿科学周刊·少年版(2018年12期)2018-01-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
