表贴式永磁同步电机的无位置传感器矢量控制
2021-10-29 14:21:46魏才柱洪剑锋陈文芗
厦门大学学报(自然科学版) 2021年6期
方 遒,魏才柱,洪剑锋,,刘 华,胡 翔,陈文芗
(1.厦门理工学院福建省客车及特种车辆研发协同创新中心,福建 厦门 361024;2.厦门大学航空航天学院,福建 厦门 361102;3.福建省客车先进设计与制造重点实验室,福建 厦门 361024)
永磁同步电机(permanent magnet synchronous motor,PMSM)以其体积小、结构简单、启动转矩大、功率因素高等优点在现代交流调速控制系统中得到了广泛应用[1-3].为了实现对PMSM的高性能控制,通常需要通过高精度传感器来测量转速及转子位置的准确信息;然而这些传感器的安装成本较高,且难以适应恶劣的工作环境[4].无传感器控制技术通过检测电机绕组中的电信号,进而通过设计控制算法实现对转子位置以及转速的估算.
目前较为常用的方法包括龙伯格(Luenberger)观测器法、模型参考自适应系统(model reference adaptive system,MRAS)法、拓展卡尔曼滤波法和滑模观测器(sliding mode observer,SMO)法[5].其中Luenberger观测器法和MRAS法已被广泛应用于PMSM的无传感器控制中,但是这两种方法对运动参数的变化非常敏感[6-8];拓展卡尔曼滤波法根据系统模型误差与测量噪声的统计特性可精确控制转子位置,但此方法涉及十分复杂的矢量和矩阵计算,且确定协方差矩阵与初始值具有很大的难度[9-10];SMO法相比于以上几种方法,具有较好的抗干扰性和鲁棒性,并且数学模型较为简单,易于实现.
传统的SMO法虽然对系统内部参数以及外部干扰具有较强的抑制作用,但是其固有的抖振现象会增加系统的机械磨损,降低系统使用寿命[11].为了减少系统的抖振,Kang等[12]和Narisha等[13]根据反电动势模型构建了反电动势观测器,采用sigmoid函数替换传统切换函数,提高了观测精度并减少了系统抖动,但是其存在较大的相位延迟,动态性能较差.Lee等[14]和李晖等[15]提出了一种迭代滑模观测器(iterative sliding mode observer,ISMO),通过运用ISMO减少了对反电动势的估计误差,并提高了转子位置的观测精度,但是其中涉及复杂的迭代计算,对硬件平台要求较高,实际系统中难以应用.Qiao等[16]和Sivakumar等[17]提出了一种改进的反电动势观测器,不再需要转子角度补偿就可以提高系统的观测器精度,优化PMSM驱动系统的性能,但是并没有经过实验验证,难以证明在实际系统中的控制性能.Deng等[18]将模糊比例积分(proportional integral,PI)控制算法运用到速度外环的滑模控制中,通过实验验证了该算法相对于传统PI控制在系统鲁棒性方面的优势,但是其模糊规则的制定对系统的依赖性较强,且实际系统的控制精度有限.
本文中引入饱和函数以及锁相环(phase-locked loop,PLL)系统改进SMO,利用Lyapunov函数验证改进的SMO的稳定性,通过仿真验证算法在提升转子位置检测精度方面的优越性;并且针对实际调速系统中,速度外环采用PI控制易受到系统参数改变、负载扰动以及转速变化影响的问题,设计了基于趋近律的速度外环滑模控制器.
1 PMSM的数学模型
电机运转时所产生的定子反电动势[EαEβ]T是转速的相关量.一般可以使用滑模变结构来观测反电动势,再根据反电动势估算出转子转速与位置信息.本文所使用的三相PMSM为表贴式电机,其满足直轴d电感分量Ld、交轴q上的电感分量Lq和同步电感Ls相等,即Ld=Lq=Ls.在两相静止坐标系(α,β)下,电机的电压方程为:
(1)
(2)
(3)
根据式(3)可构造传统SMO的方程:
(4)

(5)

(6)
其中,k为滑模增益系数,sgn为常值切换函数,
(7)

(8)

(9)
(10)
同理可得
(11)

(12)
而实际控制量为一个不连续的高频开关信号,当进行高频切换时会产生大量的谐波信号.为了减少系统抖振,提高滑模控制系统的性能,本文以饱和函数sat代替常值切换函数sgn,基于饱和函数的SMO设计为:
(13)
虽然使用饱和函数可以减少抖振,但是在进行高频切换时,由于滑模控制的不连续性,仍然会产生大量的高频谐波信号.为了连续获得反电动势的估计值,还需要引入低通滤波器(LPF)来消除高频谐波,即:
(14)
式中ω0为剪切频率.等效转子位置信息可以通过如下反正切函数获得,即:
(15)
由于LPF的存在,对于拓展反电动势的估计值会发生幅相偏移,所以需要对转子位置进行补偿.传统滑模观测转子估算角度补偿算法为
(16)

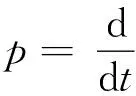
由于滑模控制存在着高频抖振,而此方法直接将这种抖振引入到角度补偿计算中,会引起较大的角度估算误差.本文以PLL的方式来提取转子位置信息,其基本原理图如图1所示.

图1 PLL的结构原理Fig.1 Principle of PLL structure
(17)

(18)
此时,图1可以等效为图2,其等效传递函数为
图2 PLL的等效框图Fig.2 Equivalent block diagram of PLL
(19)

PLL的输入可视为斜坡函数输入,根据自动控制理论可知其稳态误差为
(20)
其中,Er(s)是esr(t)的拉普拉斯变换.通过式(20)可说明PLL估算具有较强的估算精度.以典型二阶系统来整定PLL参数[19]:
(21)


图3 改进的SMO结构图Fig.3 Structure diagram of improved SMO
2 滑模控制器的设计与实现
本文对表贴式PMSM采用id=0的控制方式,首先对速度外环采用PI控制构成反馈闭环,根据其数学模型在旋转坐标系(d,q)下构建运动学方程:
(22)
(23)
(24)
其中,pn为PMSM的极对数,ωm为系统的实际转速,J为转动惯量,B是阻尼系数,Te是电磁转矩,TL是负载转矩.联立式(23)和(24),在空载(TL=0)情况下,有:
(25)
假定将极点配置到带宽为ωβ的期望区间[21],则可得:
(26)
(27)
对比上式即可得Kp和Ki的整定计算公式:
(28)
实际系统中,三相PMSM是强耦合非线性系统,速度外环采用PI控制虽然具有响应快的优点,但是在外部干扰的作用下容易带来较大的波动,使得系统动态指标较差.通过对速度外环设计滑模控制器,可有效提升系统的鲁棒性.首先对式(23)进行改写:
(29)
并设计状态变量为
(30)
其中ωref为系统的期望转速.由式(30)可得:
(31)
s=cx1+x2,
(32)
其中c>0,可得
(33)
本文采用指数趋近律的方法,令

(34)
其中,ε>0,k>0.联立式(32)和(33),则有:
(35)

(36)
因此滑模面满足可达条件,系统满足稳定条件.

d、q/α、β表示从同步旋转坐标系(d,q)变换到静止坐标系(α,β),(a,b,c)为实际的自然坐标系.图4 滑模控制整体结构Fig.4 Overall structure of sliding mode control
3 仿真及实验结果分析
本文先在MATLAB/Simulink中建立了基于改进SMO和滑模控制器的PMSM无速度传感器矢量控制模型,验证滑模控制相对于PI控制在抗扰动以及调速方面的优越性.之后再将仿真中逻辑运算模块用实时中断模块(RTI)中的I/O接口替换,烧录到数字空间(dSPACE)的硬件板卡中,结合ControlDesk即可实现对电机的实时在线调试.控制系统整体结构如图5所示.

图5 控制系统整体结构Fig.5 Overall structure of control system
3.1 仿真结果分析
对比分析本文提出的基于改进SMO和滑模控制器的滑模控制算法(记为SM)与PI控制算法的控制性能:设置目标转速为1 000 r/min,0 s时启动仿真系统,在0.25 s时突加0.35 N·m的负载,在0.5 s时改变目标转速为1 500 r/min;PLL中的PI控制器参数选定为Kp=1.4,Ki=11;速度外环PI控制器所选的Kp=0.16,Ki=3.4;SMO下的参数选择为c=60,ε=300,k=1 800.图6给出了启动过程的电流与电磁转矩变化.稳态时iq为0.276 A,PI控制和SM控制下的最大波动幅值分别为0.314和0.292 A,对应的超调量分别为13.8%和5.8%;转折处的期望iq为0.418 A,而PI控制和SM控制下的尖峰电压分别为0.458和0.432 A,对应的超调量分别为9.6%和3.3%(图6(a)).稳态时的电磁转矩Te值为0.306 N·m,在PI控制和SM控制下的稳态转矩最大振幅为0.324和0.314 N·m,对应的超调量分别为5.9%和2.6%;转折处的电磁转矩大小分别为0.482和0.454 N·m,对应的超调量分别为14.3%和7.6%(图6(b)).仿真结果表明,SM控制相比于PI控制具有更好的动态追踪性能.
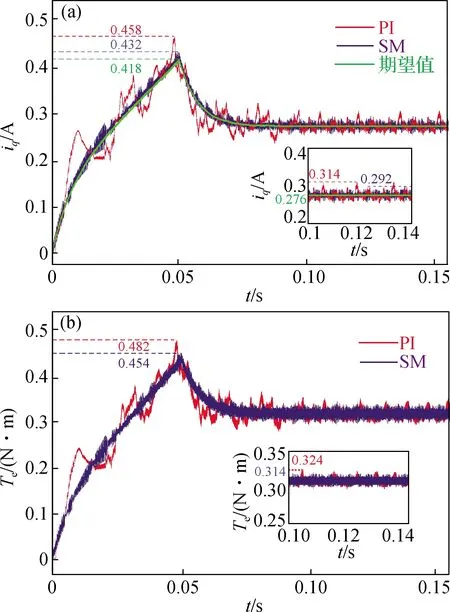
图6 启动过程的iq和TeFig.6iq and Te during starting process
图7给出了突加负载时,转速(N)和三相定子的电流在两种控制算法下的仿真图.突加负载时,PI控制的N下降8%,回到稳态用时0.05 s;而SM控制的N仅下降了3%,回到稳态用时0.01 s(图7(a)).SM控制相对于PI控制,转速突变减少了5个百分点,且回到稳定状态所用时间减少0.04 s.由图7(b)和(c)可知,在0.25 s突加负载后,PI控制下三相定子电流存在明显的超调,最大幅值达到了-4.36 A,超调量为11.22%,而SM控制下稳态时的电流波动范围为±3.92 A,过渡更加平滑,无明显超调.
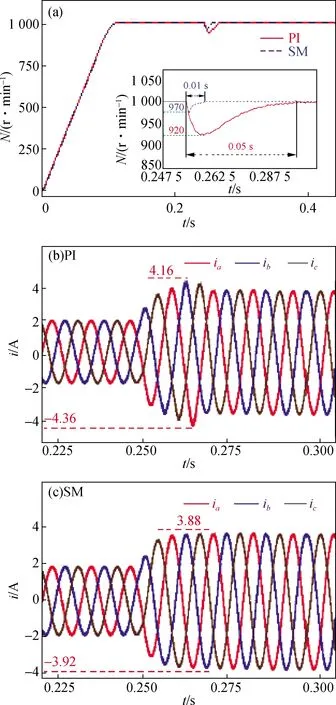
图7 突加负载时的N、ia、ib和icFig.7N,ia,ib and ic under sudden loading
为了分析转速突变情况下SM控制的动态性能,在0.5 s 时改变目标转速为1 500 r/min,SM控制与PI控制的转速响应曲线和电磁转矩响应曲线如图8所示.对于突加速工况,PI控制相比于SM控制响应速度快0.003 s,但最终达到稳态的时间基本相同;而在电磁转矩响应曲线中,稳态电磁转矩值为0.98 N·m,PI控制电磁转矩最大值为1.06 N·m,而SM控制电磁转矩最大值为1.03 N·m,最大超调量分别为8.16%和5.1%.

图8 突加速时的N(a)和Te(b)Fig.8N (a) and Te (b) of abrupt acceleration
分析稳态转速、突加负载以及转速突变这几种工况下的仿真数据表明:改进的SMO相比于PI控制器在抗干扰以及动态性能上存在明显的优势,且速度外环滑模控制算法具有有效性.
3.2 实验结果分析
本文结合dSPACE半实物仿真平台,完成了PMSM的无位置传感器矢量控制研究.首先搭建完整的闭环控制系统,对传统的SMO进行优化,然后在改进的SMO下对速度外环进行优化,通过变负载实验,比较分析PI与滑模在控制性能上的差异.设置电机的稳定转速为1 000 r/min,本文实验所使用的PMSM的参数如表1所示.
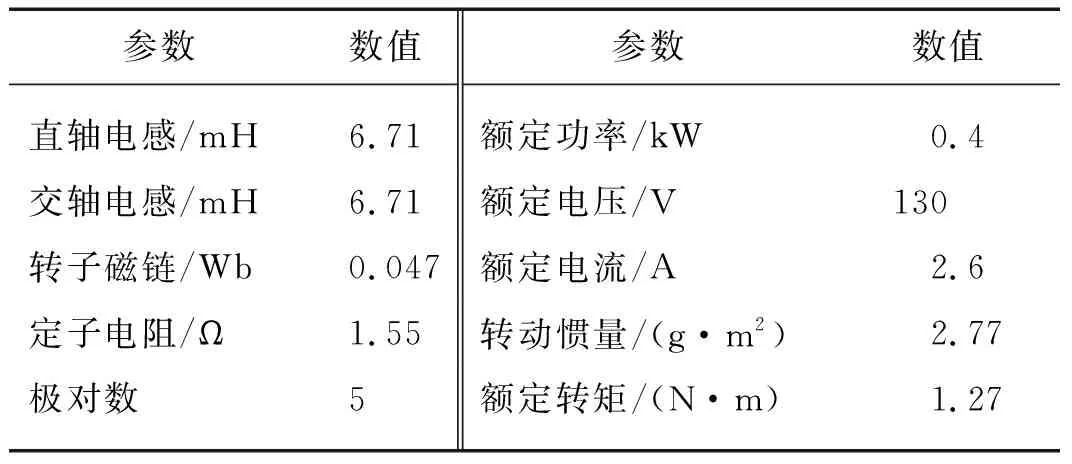
表1 电机参数Tab.1 Motor parameters
对比电机稳定运行时的实际位置与预测位置发现(图9):传统SMO的转子位置估计误差为1.0 rad/s,而改进后的SMO的转子位置估计误差小于0.1 rad/s,说明改进的SMO能更好地满足实际电机控制性能要求.

图9 转子实际位置与预测位置对比Fig.9 Comparison of actual position and predicted position of rotor
基于改进后的SMO,进行速度外环的对比实验(图10).电机转速达到稳定状态时,传统PI控制的稳定范围为982~1 016 r/min,超调量约为1.7%;而改进的滑模控制稳定范围为996~1 004 r/min,超调量为0.4%,减少了1.3个百分点.

图10 稳定状态时的速度曲线Fig.10 Speed curve of stable state
图11为稳定状态下d轴和q轴的电流追踪曲线,可知id的设定值为0时,实际电流变化范围为±60 mA;q轴实际电流对给定电流也具有很强的追踪性能.图12为反电动势观测波形,具有清晰的正弦波波形,即稳态误差小,在此情况下电机能带负载稳定运行.图13为三相定子电流的实际波形,电流畸变小,通过实验可说明改进后的算法具有较好的控制效果.

图11 电流追踪曲线Fig.11 Current tracking curve

图12 反电动势波形Fig.12 Back counter electromotive force waveforms

图13 三相定子电流Fig.13 Three-phase stator current
为了验证滑模控制相比于PI控制在抗扰动方面的优势,进行变负载工况实验(图14),在电机转速达到稳定状态时,给电机突加和突减0.35 N·m的负载.本实验负载由三相非线性负载箱提供,因此转速响应曲线存在一个往复过程.由图14可知:对于突加0.35 N·m负载的工况,在PI控制下转速的波动范围是850~1 100 r/min,最大超调15%,回归稳态所用的时间是0.27 s;在SM控制下转速波动范围在880~1 070 r/min,最大超调12%,回归稳态用时0.28 s,最大超调量减少3个百分点.在突减0.35 N·m负载的工况下,PI控制下的转速波动范围在920~1 150 r/min,最大超调15%,回归稳态用时0.35 s;在SM控制下,转速波动范围在930~1 108 r/min,最大超调10.8%,回归稳态用时0.36 s,最大超调量减少4.2个百分点.通过对比分析可知,PI控制虽然在响应速度方面略有优势,但是其突变瞬时超调量明显高于滑模控制,滑模控制在抑制干扰方面能力更强,实验结果与仿真结果一致.

图14 突加和突减负载时的转速变化Fig.14 Speed change during sudden load increase and decrease
4 结 论
本文设计了一种基于改进型SMO和滑模控制器的PMSM无位置传感器矢量控制模型,在观测器中引入PLL来提取转子信息,并通过Lyapunov方程证明了系统的稳定性;在速度外环使用SMO取代传统的PI控制器,减少了因系统参数变化而带来的影响.通过仿真与实验验证,改进后的SM算法相比于PI算法在抗干扰和调速方面具有明显的优越性.
猜你喜欢
石油沥青(2021年1期)2021-01-11 05:41:31
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:50
汽车电器(2019年2期)2019-03-22 03:35:16
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
焊接(2015年5期)2015-07-18 11:03:41
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
城市道桥与防洪(2014年7期)2014-02-27 07:27:54