
混合交通环境下网联交叉口车辆协同诱导策略及仿真测试*
2021-10-27 07:19张心睿王润民凡海金赵祥模袁绍欣
汽车技术 2021年10期
张心睿 王润民 凡海金 赵祥模 袁绍欣
(长安大学,西安710064)
主题词:信控交叉口 网联汽车 混合交通 诱导策略 渗透率
1 前言
随着汽车保有量的急剧增长,城市道路交通拥堵问题日益突出。道路交叉口作为道路的相交点,往往是城市道路网络交通流运行的瓶颈。此外,交叉口交通信号灯的控制使得交叉口区域车辆频繁起停及加减速,导致通行效率和汽车燃油经济性较低[1]。车联网(Vehicle to Everything,V2X)是目前提高交通安全水平、提升交通效率、减少交通排放的重要技术手段[2]。在网联信号交叉口环境下,融合V2X 与自动驾驶技术的智能网联汽车(Connected and Automated Vehicle,CAV)通过车车(Vehicle to Vehicle,V2V)通信和车路(Vehicle to Infrastructure,V2I)通信获取周围车辆的运动状态信息以及数百米外信号灯相位与倒计时(Signal Phase and Timing,SPaT)信息,进而精准地完成轨迹优化控制,实现信号交叉口生态驶入与离开(Eco-Approach and Departure,EAD)[3]。
众多学者围绕网联交叉口环境下的智能网联汽车诱导控制开展了相关研究。文献[4]~文献[6]建立交叉口车速控制模型,将交叉口车辆行驶分成多个恒定阶段,进行车辆轨迹优化。文献[7]提出一种模型预测控制模型,对车辆速度进行优化,以缩短行驶时间、降低污染物排放水平。Seredynski 等[8]提出了一种多段最优车速建议(Green Light Optimal Speed Advisory,GLOSA)方法,并采用遗传算法进行速度优化,结果表明,该方法比一次GLOSA结果更好。上述方法均假设交通环境中的车辆为具备完全自动驾驶能力的智能网联汽车,然而自动驾驶全面落地仍有诸多困难,可以预见的是,未来很长一段时间将出现CAV 与网联人工驾驶车辆(Connected Human-driven Vehicle,CHV)组成混合式交通流共享道路资源的场景。受驾驶员驾驶行为的影响,CAV 与CHV行车特性存在不可忽略的差异[9]。因此,需要对混合交通环境下的网联交叉口车辆协同诱导策略进行研究,并系统地分析不同交通流量、不同CAV渗透率以及不同驾驶员服从度对诱导策略的影响。
基于上述考虑,本文构建一种网联信控交叉口场景,并对车辆运动学、车辆跟驰行为及车辆燃油消耗量等进行建模与假设,在此基础上提出一种基于车辆编队的CAV与CHV协同行车诱导策略。然后以平均行驶延误时间(Average Travel Time Delay,ATTD)和平均燃油消耗量(Average Fuel Consumption,AFC)为评价指标,通过SUMO仿真系统地测试分析交通流量、CAV渗透率、CHV驾驶员服从度对所提出的协同行车诱导策略的影响。
2 网联信控交叉口场景构建
本文设计了一种双向2车道的十字型交叉口场景,如图1所示。场景内行驶的车辆包含CAV和CHV,2种车辆均具备网联通信能力,其中CAV 为完全自动驾驶汽车,具备自主智能感知、决策及控制能力,以及与其他车辆或交通信号灯通信的能力,CHV 可与附近车辆实现V2V通信。交叉口交通信号灯同样具备网联通信能力,可与场景内的车辆实现V2I 通信。此外,为聚焦问题研究,本文作如下假设:

图1 双向2车道十字型交叉口场景
a.进入交叉口区域前,车辆不存在换道、倒车、掉头等行为,仅考虑进入交叉口区域车辆的直行行为,且遵循先到先服务原则,即同车道内先进入交叉口车辆先驶出。
b.网联交通信号灯(交叉口中心点)400 m范围内为V2I有效通信范围[10]。当车辆进入信号灯有效通信范围时,CAV应服从交叉口管控;设定网联通信为实时可靠的通信,不考虑潜在的网络丢包、时延等不可靠网络条件。
c.进入交叉口管控范围的车辆可通过V2V 方式获取周边车辆位置、速度等状态信息,并通过V2I 方式获取网联交通信号灯相位信息,实现车辆轨迹优化。
3 车辆行为与油耗模型构建
3.1 车辆运动学模型
基于前文构建的交叉口场景,本文仅考虑车辆的纵向轨迹控制,不考虑车辆换道行为,因此不涉及车辆的横向动力学性能,CAV与CHV应满足:
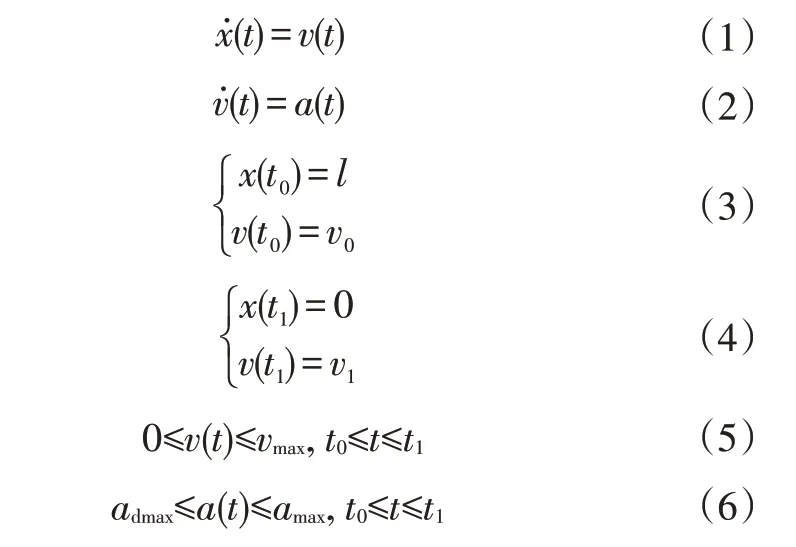
式中,x(t)、v(t)、a(t)分别为t时刻车辆与交叉口停止线的距离、车速和加速度;l、v0分别为初始时刻(t0)车辆与交叉口停止线的距离和速度;t1为车辆越过停止线的时刻;v1为车辆越过停止线时的速度;vmax为车辆最大速度;admax、amax分别为车辆最大减速度和最大加速度。
3.2 车辆跟驰模型
智能驾驶员模型(Intelligent Driver Model,IDM)可较好地模拟智能网联环境中人工驾驶车辆的跟驰行为[11],因此本文选用IDM 对场景中CHV 的行为进行建模,具体模型表达式为:

式中,an,t为第n辆车t时刻加速度;amax为最大加速度;vn,t为第n辆车t时刻速度;ve为期望车速;δ为加速度指数;sn,t为第n辆车t时刻的跟驰间距;s*(t)为期望最小车间距,可表示为:

式中,s0为静止安全距离;s1为系数;TI为安全车头时距;Δv为第n辆车与第(n-1)辆车的速度差;b为舒适减速度的绝对值。
CAV 采用协同式自适应巡航(Cooperative Adaptive Cruise Control,CACC)模型[12-14],基本模型公式为:

式中,e为实际车间距与期望车间距的误差;xn为第n辆车的位移;TC为安全车头时距;vn为第n辆车的速度;vnp为第n辆车前一时刻速度;kp、kd为控制系数。
3.3 车辆油耗模型
本文采用MOVES(Motor Vehicle Emissions Simulator)模型估算车辆燃油消耗量,其主要通过分析车辆的比功率(Vehicle Specific Power,VSP)进行估算,比功率pvsp的计算公式为[15]:

式中,v为车辆速度;a为车辆加速度。
4 基于车辆编队的网联车辆协同行车诱导策略设计
如图2所示,本文通过车辆编队,将行驶方向相同、运动状态相近的车辆进行编组,根据在队列中位置的不同,可将车辆分为领航车辆与跟驰车辆,领航车辆为可控的CAV,信号灯仅对领航车辆进行诱导,跟驰车辆为CAV 与CHV 组成的混合车队,车辆的行驶应满足协同行车诱导策略和前车行为约束。

图2 车辆编队示意
因受到交叉口信号灯的约束,车队存在难以全部通过的情况时,队列中领航车辆通过计算当前绿灯时间来判断可通过的车辆与无法通过的车辆,向其后方跟驰车辆发送指令进行队列分割,生成2 个队列,跟驰的CAV 成为新队伍的领航车辆,实现车辆“角色”更换。
4.1 三阶段诱导策略设计
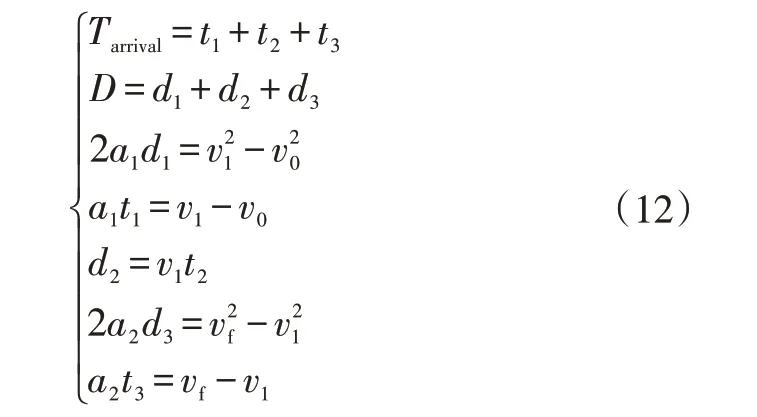
Seredynski等[16]提出了一种考虑绿灯时间的车速优化引导策略。基于上述思路,本文将车辆到达交叉口区域前的轨迹划分为3 个阶段,阶段1 与阶段3 为匀变速阶段,车辆分别具有恒定的加速度a1和a2,阶段2 为匀速阶段,车辆具有恒定的速度v,设车辆到达交叉口的时间为Tarrival,车辆到达交叉口时的速度为vf,车辆与交叉口的距离D、3个阶段的行驶距离d1、d2、d3及时间t1、t2、t3应满足:
4.2 领航车辆诱导策略
领航车辆根据到达交叉口控制范围时的交通信号灯相位状态执行不同的行车策略:
a.当前信号灯相位为绿灯时,依据车辆到达交叉口时的状态,分为3种情况,并执行相应的诱导策略,如图3a所示:①如果领航车辆可保持最大车速匀速通过交叉口,则保持匀速行驶;②如果领航车辆以车速v0匀速行驶,到达交叉口时信号灯将处于红灯相位,但在不超过最大限速时,不受前方车辆影响能够在当前绿灯相位结束前通过交叉口,则诱导其加速通过;③如果领航车辆以当前车速并以最大加速度行驶,到达交叉口时仍无法在当前绿灯相位通过交叉口,则诱导车辆减速,在下一绿灯相位通过交叉口。
b.当前信号灯相位为红灯或黄灯,根据现有交通规则,黄灯时未通过停止线车辆应停车等待,因此,对于CAV 而言,将黄灯相位与红灯相位合并,如图3b所示:①相位剩余时间较长时,即使车辆减速仍在红灯相位到达交叉口,则诱导车辆缓慢减速并停车等待;②相位剩余时间较短时,则诱导车辆先减速,在下一绿灯相位开始时到达交叉口,并以最大车速通过交叉口;③相位剩余时间非常短时,车辆可保持最大车速匀速行驶,在下一绿灯相位开始时到达交叉口。
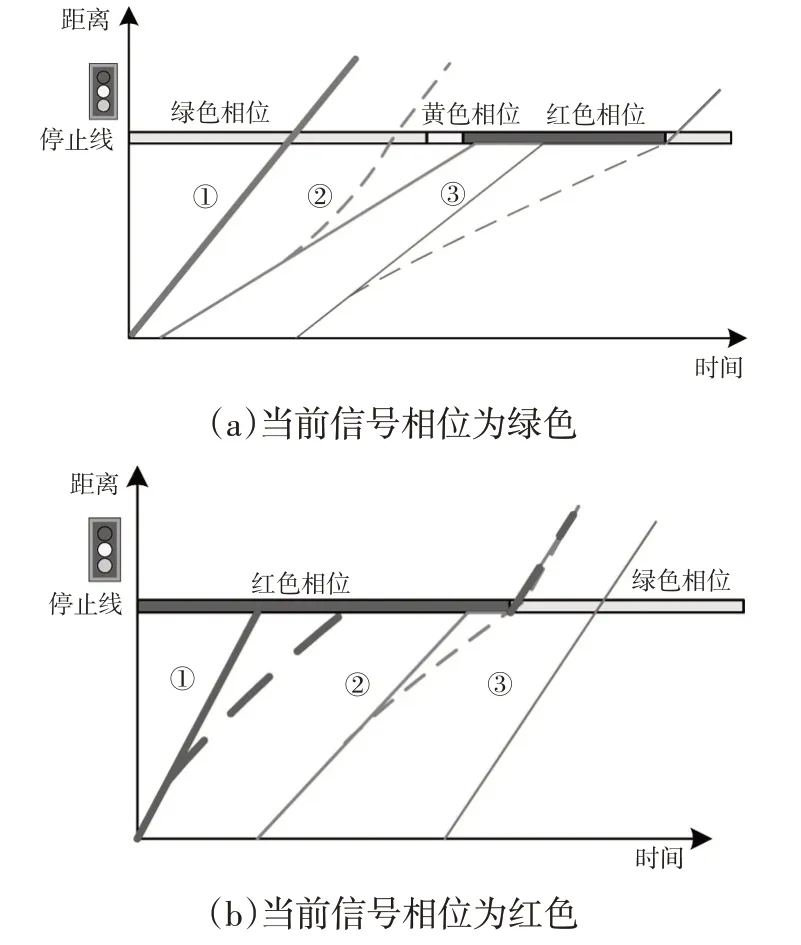
图3 领航车辆诱导策略
4.3 跟驰车辆运动轨迹分析
对于跟驰车辆,运动轨迹包括如图4所示的2 种类型:类型1受到前车约束,保持跟驰行驶;类型2不受前车约束,为减少延误,车辆需尽可能快地到达交叉口并通过。此外,跟驰车辆包括CAV与CHV,二者跟驰行为由各自的跟驰模型决定。

图4 跟驰车辆行驶轨迹
5 仿真测试
5.1 仿真环境构建
为验证所提出的诱导策略的有效性和可靠性,本文采用SUMO 仿真平台搭建仿真环境。搭建的测试场景如图5所示,设置参数如表1所示。

图5 仿真场景示意
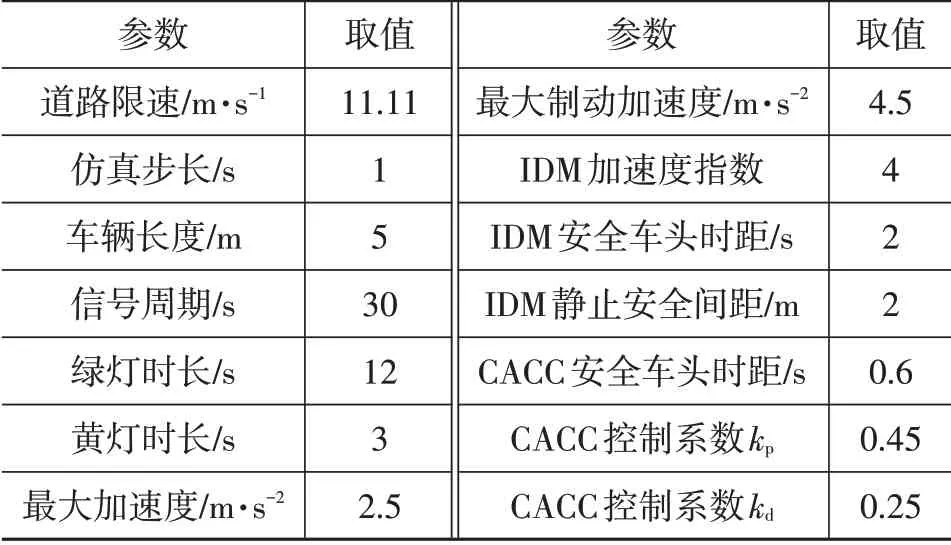
表1 仿真参数设置
5.2 测试方案设计
本文仿真测试重点关注不同CAV 渗透率和不同CHV 驾驶员的驾驶特性对设计的诱导策略的影响,选用交通饱和度来描述场景交通流量大小,其中饱和度为0.5、0.8和1.2分别代表稀疏、欠饱和与过饱和状态:
a.为研究不同CAV 渗透率对设计的诱导策略的影响,分别设计了在交通流饱和度为0.5、0.8 和1.2 的3种工况下,通过逐步提升CAV 渗透率(0、20%、40%、60%、80%和100%)测试诱导策略的性能表现。
b.为研究不同CHV驾驶员对CAV车速诱导的服从度对诱导策略的影响,本文通过调整驾驶员的驾驶特性(驾驶员不完美驾驶特性,即实际车速与期望车速存在差异并在期望车速附近波动)模拟驾驶员对CAV车速诱导的服从度,在交通流饱和度为1.2的工况下,对比3种CHV驾驶员服从度(20%、60%和80%)下诱导策略的性能表现。
5.3 评价指标选取
车辆诱导的优化指标总体可分为通行效率和车辆燃料消耗情况。本文选用平均行驶延误时间和平均燃油消耗量分别刻画交叉口通行效率和车辆燃料消耗情况。
平均行驶延误时间是指一次仿真中,从车辆进入仿真场景起,通过交叉口并驶出仿真场景的所有车辆行驶延误时间的平均值,可以反映交叉口车辆通行效率。其中,延误是指车辆在通过交叉口时由于信号控制或交通拥堵等状况导致的时间延误。
平均燃油消耗量是指一次仿真中,从车辆进入仿真场景起,通过交叉口并驶出仿真场景的所有车辆燃油消耗量的平均值,可以反映车辆的燃油经济性。
5.4 测试结果与分析
5.4.1 不同CAV渗透率的影响分析
图6所示为不同交通饱和度时,不同CAV渗透率下ATTD 和AFC 测试结果。由图6可见,随着CAV 渗透率的增大,ATTD和AFC均不断减小。对于交通效率:在非过饱和情况下,CAV渗透率超过40%时,ATTD和AFC显著下降;在过饱和情况下,CAV渗透率达到20%时,诱导策略就会发挥显著作用。其原因可能在于过饱和工况下CHV 更易受到CAV 的诱导,因此诱导策略可在低CAV渗透率下发挥作用,在不饱和工况下,则需要高渗透率的CAV对CHV进行诱导。当渗透率达到100%时,在各种饱和度下,ATTD下降7%以上,并且在过饱和的工况下,ATTD下降可达到4.8 s。原因在于CAV可以提前获知交叉口相位及倒计时信息,通过优化自身车辆轨迹,避免停车等候,减少了起停损失并充分利用了绿灯时间,但交通信号灯配时方案固定,因此对ATTD 的优化是有限的。对于燃油经济性,随着CAV渗透率的提升,AFC下降至少13.02%,过饱和工况下,AFC可下降39.29%,这是由于进行车速诱导的CAV提前采取制动,从而提升了燃油经济性。综上,各种饱和度下,随着CAV渗透率的提升,交叉口通行效率和燃油经济性均有所提升。

图6 不同饱和度和CAV渗透率下ATTD和AFC测试结果
5.4.2 不同CHV服从度的影响分析
交通流饱和度为1.2的工况下3种CHV驾驶员服从度条件下的ATTD 和AFC 测试结果如表2 和表3所示。测试结果表明,随着CAV 渗透率和CHV 驾驶员服从度的提升,ATTD和AFC优化比例不断增加。但在CAV低渗透率条件下,CHV 服从度较低时,对ATTD 和AFC 反而带来了负面效果。当CAV 渗透率高于60%时,CHV驾驶员服从度对ATTD和AFC的影响不明显,原因在于高渗透率下CAV 对CHV 具有较好的诱导作用,而低渗透率下CAV 诱导作用减弱,CHV 低服从度使得车辆停车等待概率增大,对诱导效果产生影响。
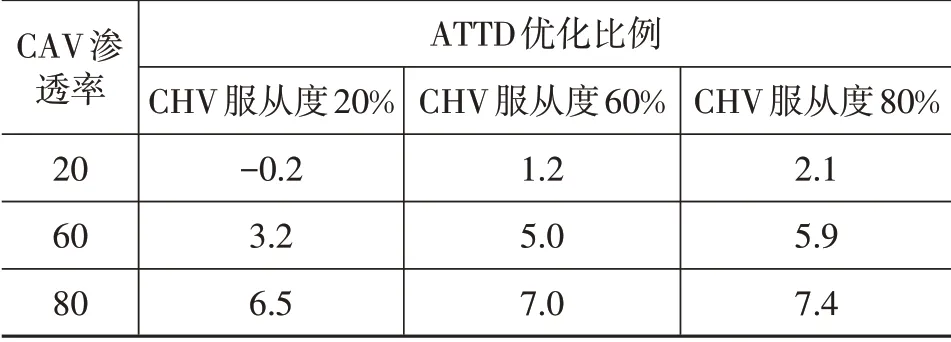
表2 不同CHV服从度下的ATTD优化结果 %
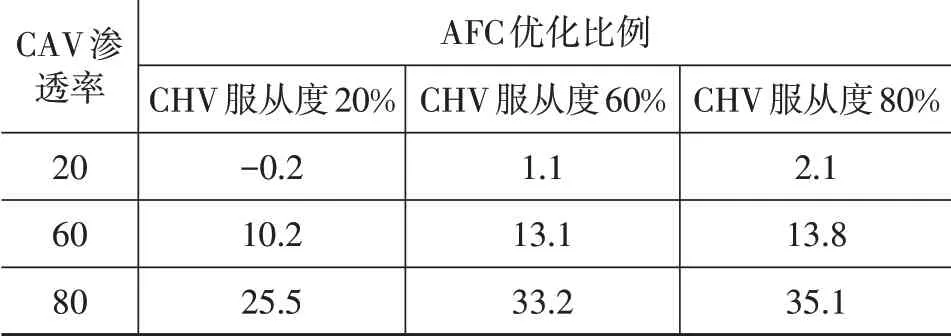
表3 不同CHV服从度下的AFC优化结果 %
6 结束语
本文针对智能网联汽车(CAV)与网联人工驾驶汽车(CHV)组成的混合式交通流,设计了一种网联信控交叉口场景下的行车诱导策略,选取平均行驶延误时间(ATTD)和平均燃油消耗量(AFC)作为评价指标,通过SUMO仿真,系统地测试分析了交通流量、CAV渗透率、CHV 驾驶员服从度等因素对协同诱导策略性能的影响。测试结果表明:在稀疏、欠饱和及过饱和交通流量条件下,随着CAV渗透率的提升,网联信控交叉口车辆通行效率和车辆燃油经济性不断提升,过饱和工况下平均行驶延误时间可缩短4.8 s,平均燃油消耗量可下降39.29%;高饱和度交通环境下,低CAV渗透率即可对交通性能产生显著作用,低饱和度交通环境下,则需要高CAV渗透率提升交通性能;在CAV渗透率低于60%时,CHV驾驶员服从度对协同诱导策略的性能的影响更为显著。
在本文研究中,交通信号配时方案是固定的,而车辆轨迹优化对于交通通行性能提升是有限的,因此下一步将着力于混合交通环境下交通信号-车辆轨迹协同优化问题研究。除此之外,车辆的网联化不会一蹴而就,网联车辆和非网联车辆混合行驶的情况下如何进行交叉口交通性能优化也是一个巨大挑战,这也是本文下一步的研究方向。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
内燃机与配件(2022年2期)2022-01-17
建材发展导向(2021年19期)2021-12-06
综艺报(2020年19期)2020-11-06
中国计算机报(2019年46期)2019-01-13
记者观察(2017年9期)2018-04-19
财经(2017年24期)2017-10-21
金融经济(2017年9期)2017-09-13
