基于位移放大机构的压电快速反射镜设计
2021-10-12 11:57刘重飞贾建军戴箭胜
上海交通大学学报 2021年9期
谢 永,刘重飞,贾建军,2,戴箭胜
(1.中国科学院 上海技术物理研究所,上海 200083;2.中国科学院大学,北京 100049)
在现代空间探测工程、激光通信、工业与医疗设备等与国民经济重大相关的课题中,光束的精密指向、跟踪与稳定技术已成为系统不可缺少的重要组成部分.尤其在大气光学应用领域,必须要求光学系统能够精确快速地控制光束的指向,以补偿大气扰动、载体振动共同引起的光束偏转[1-2].
快速反射镜(FSM,以下简称快反镜)是空间光通信、自适应光学等领域的关键器材之一,用于在目标和接收器之间调整光束方向.随着实际应用需求的多样化,现有的小转角快反镜已经难以满足高端技术领域的需求.国外对于快反镜的研究起步很早,技术相对成熟,已经形成商业化产品.德国普爱纳米位移技术公司作为压电陶瓷驱动领域的先驱,其研发的直驱式S-330系列快反镜应用十分广泛,但其偏转范围略小,仅为10 mrad,而S-335型快反镜偏转范围可达35 mrad,线性度为0.05%,重复性为 1 μrad.美国Ball Aerospace & Technologies公司数十年来已生产出不同规格的一系列音圈驱动快反镜,覆盖大部分航空航天方面的需求[3].麻省理工学院研制的先进快反镜,采用自制音圈电机作为驱动元件,可实现±3.5 mrad的偏转角度[4].在国内也有多家单位,如成都光电技术研究所、长春光学精密机械与物理研究所、哈尔滨工业大学、华中科技大学等对快反镜进行了深入的研究,取得了较好的成果[5-7].华中科技大学研制的二维音圈电机驱动快反镜可实现±5° 的偏转角,扫描带宽为200 Hz,线性度约为7%,二维压电陶瓷驱动快反镜采用菱形放大机构可实现±1° 的偏转角度,扫描带宽为 500 Hz,线性度约为2%.显然,采用压电陶瓷驱动可实现更高的精度,但放大机构的引入导致系统线性度有所降低[8].上海技术物理研究所研制的双面压电陶瓷驱动快反镜,采用杠杆式放大机构实现 27 mrad 的机械偏转角度,在压电陶瓷上粘贴应变用于闭环反馈,绝对定位精度优于27 μrad[9-10].随着光学载荷视场的不断扩大、跟踪速度的不断提高,对快反镜的通光口径、偏转范围的要求也越来越高.因此,开展大口径、大转角快反镜产品的研究具有重要的理论意义和实际应用价值.
众所周知,压电陶瓷具有出力大、分辨率高的特点,将其作为快反镜驱动器可实现较高的定位精度,然而压电陶瓷的伸长量却大大制约了快反镜的偏转范围.因此,必须采用放大机构对压电陶瓷的位移输出进行放大,并且将放大机构的特性纳入闭环反馈中,有望进一步提供系统的线性度和定位精度.
本文采用二级杠杆式放大机构对压电陶瓷的输出位移进行放大,同时利用粘贴在放大机构上的电阻应变片作为反馈传感器,设计一种新型压电快反镜.通过有限元仿真对设计结构的偏转范围、谐振频率等指标进行分析验证,最后对所研制的产品进行性能测试.
1 快速反射镜结构设计
由于柔性铰链具有无摩擦、无空回、无磨损等显著特点,绝大多数的快反镜都采用了柔性铰链作为偏转轴,该类快反镜被称为柔性轴快反镜.一般而言,快反镜的偏转范围由致动器的输出位移决定,通光口径决定了反射镜的尺寸,而结构的机械谐振频率则是工作带宽的重要影响因素.所设计的快反镜结构主要包括:压电陶瓷、位移放大机构、柔性铰链支撑以及镜座等部分,具体结构形式和基本尺寸参数如图1所示.压电陶瓷和位移放大机构共同构成驱动模块,采用四点驱动形式,同一转轴上的驱动模块构成差分顶拉结构,通过柔性铰链支撑将位移传递给反射镜镜座,从而实现反射镜的偏转.反射镜通过三点粘接方式固定在镜座上.设计中选用的压电陶瓷基本参数如表1所示.为实现更大的位移输出量,将两个相同的压电陶瓷首尾粘接在一起,但共用正负极,在电路上并联使用.
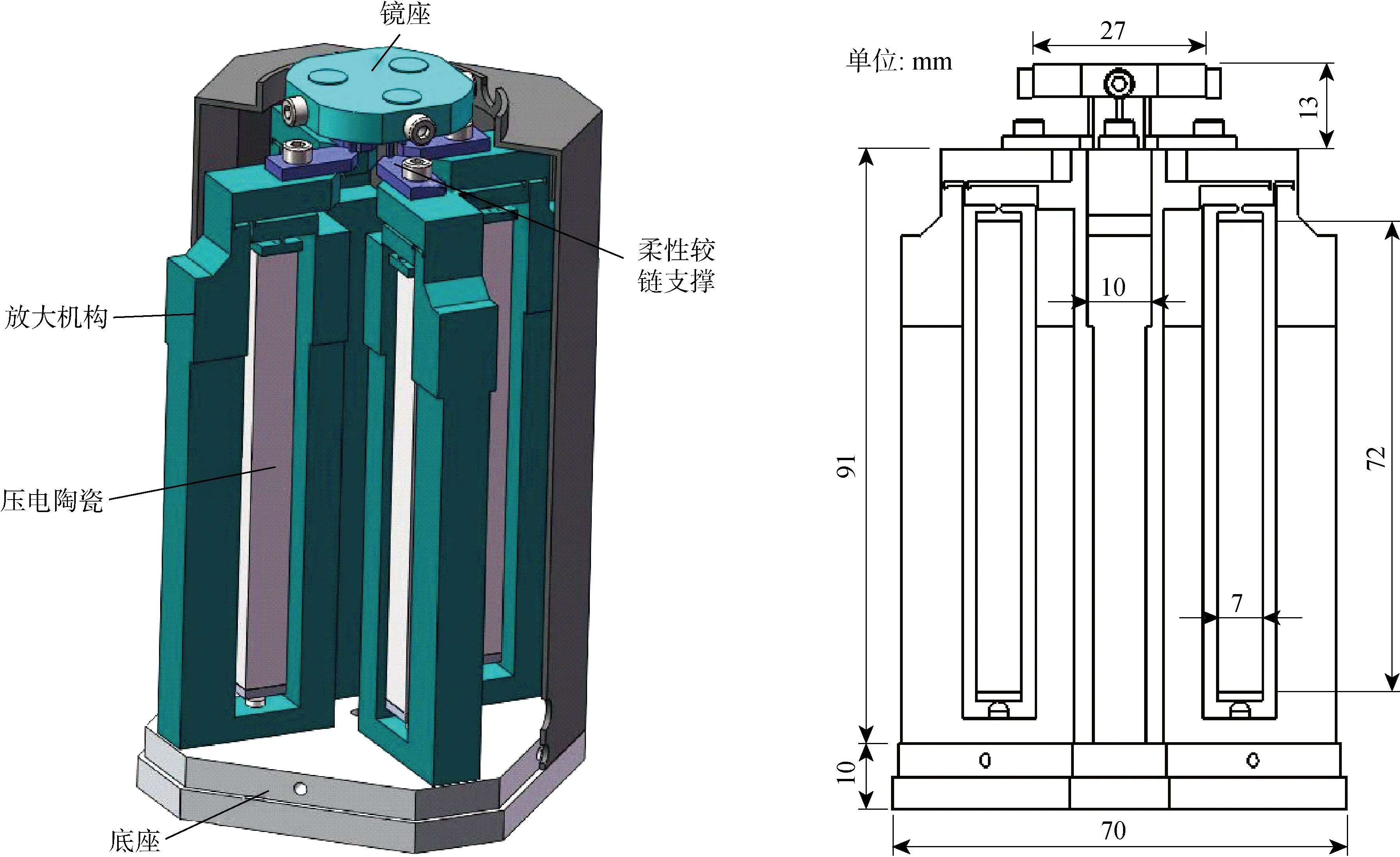
图1 快反镜结构示意图
表1 压电陶瓷基本参数
1.1 放大机构设计
压电陶瓷是利用逆压电效应实现位移输出的装置,具有分辨率高、响应速度快等特点.由于单片压电陶瓷的位移量非常小,通常采用多层压电陶瓷片叠堆在一起的方式实现几十微米的位移输出.尽管如此,仍然无法满足大偏转范围快反镜的要求,因此必须对压电陶瓷的输出位移进行放大.位移放大机构在精密定位领域有广泛的应用,借助位移放大机构可实现几倍甚至十几倍的位移放大效果.其中,杠杆式机构结构简单、体积小、易于制造、累计误差小,更适用于空间紧凑的精密装置.杠杆式放大机构的放大倍数可通过杠杆长度的改变进行调整.采用二级杠杆式放大机构对压电陶瓷输出位移进行放大,工作原理如图2所示.B点相当于一级杠杆支点,压电陶瓷输出力作用于铰链A处,使杠杆末端D点产生一级放大后的位移.在第二级杠杆变形中,C点相当于支点,一级放大的输出即D点,此时相当于二级放大的输入点,推动杠杆臂CE绕C点偏转,在二级放大末端E处产生最终输出位移.根据图2所示的结构尺寸,放大机构选用不锈钢材料.有限元仿真中,在输出端A处分别施加10、20、30、40、50、60 μm的位移,计算输出端E的位移量,柔性铰链放大机构的变形如图3所示.其中:Δd为变形量;ε为弹性应变.有限元计算结果如表2所示.其中:s1为输入位移;s2为输出位移;β为放大倍数.由表2可知,所设计的二级杠杆式放大机构可实现约9倍的位移放大,极大地拓展了压电陶瓷的位移输出,为大角度偏转的实现提供了保障.
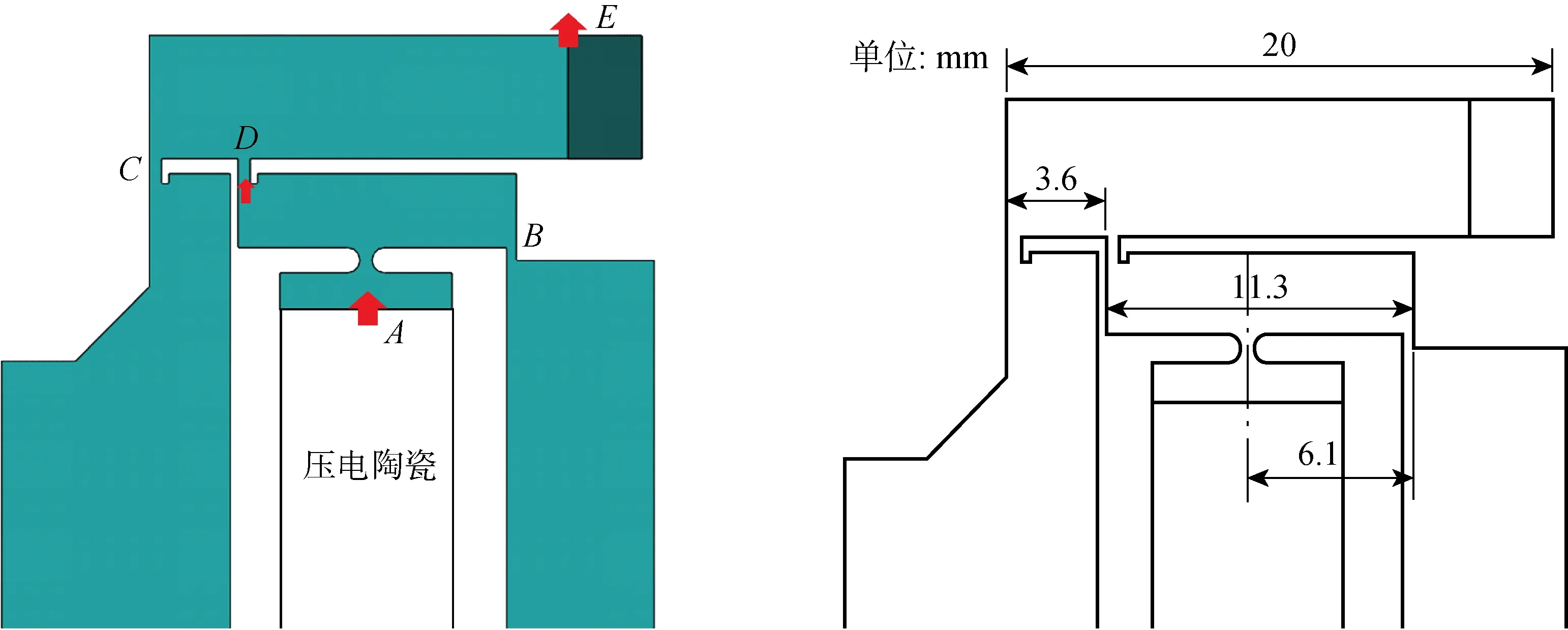
图2 二级杠杆式放大机构
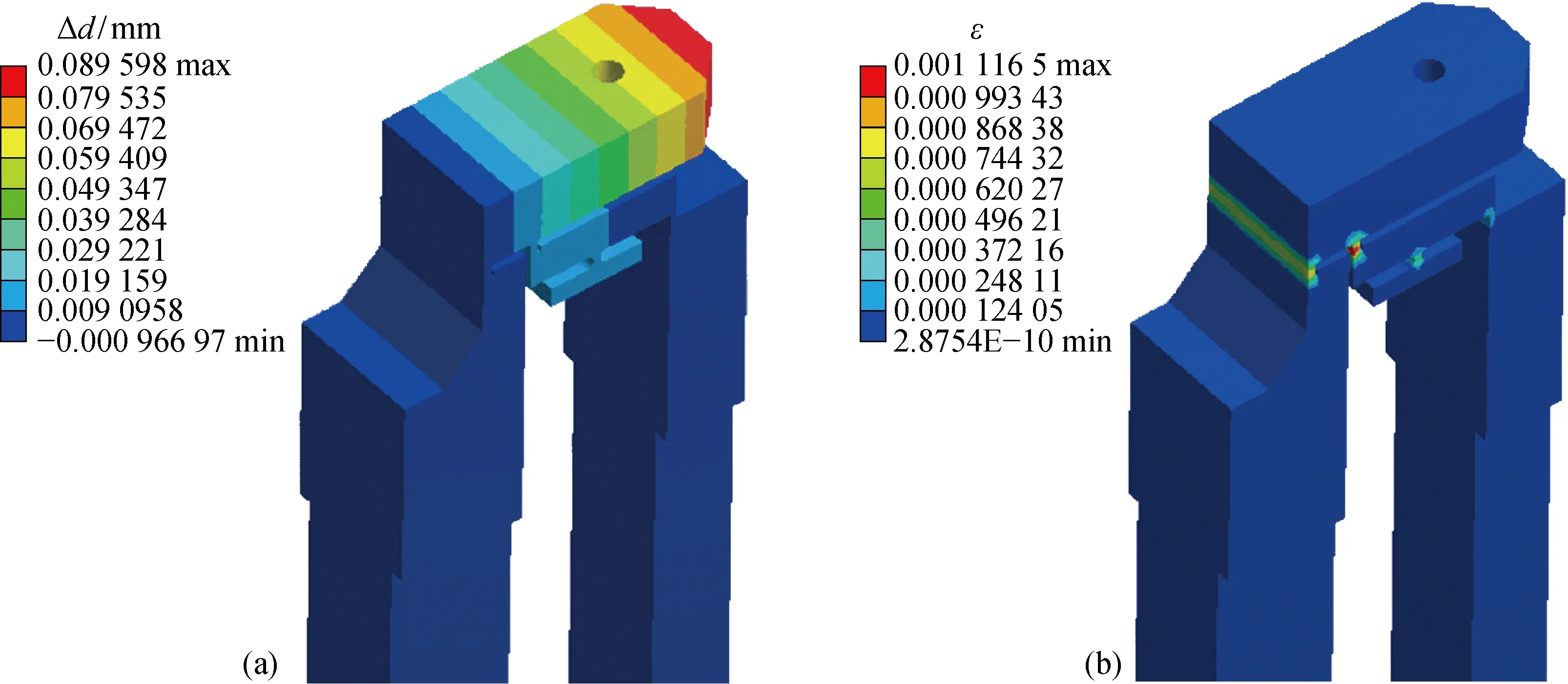
图3 柔性铰链放大机构变形图
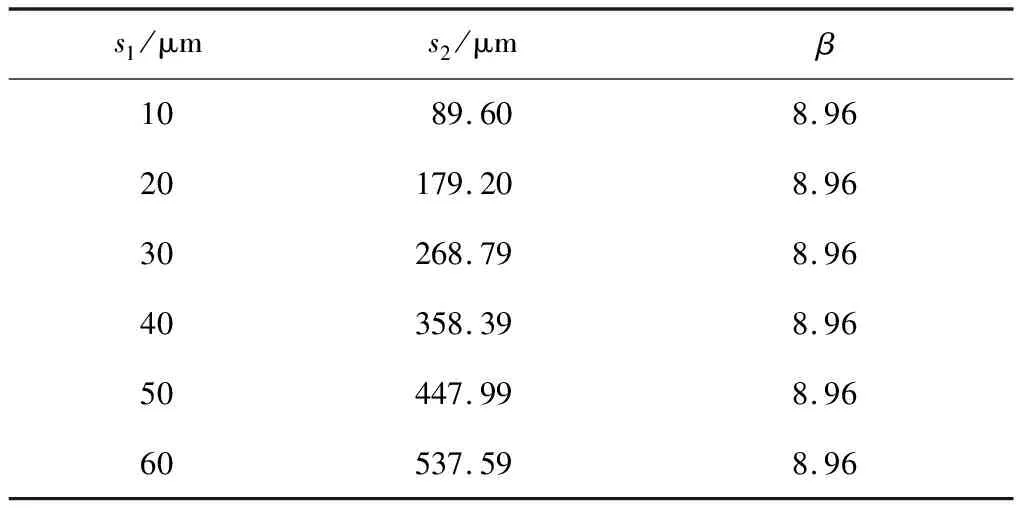
表2 有限元软件分析结果
1.2 位移传感器设计
压电陶瓷在驱动电压升高时的电压-位移曲线与降低时的电压-位移曲线并不重合,这种现象称为压电陶瓷的迟滞特性.此外,给压电陶瓷两端施加一个恒定的电压值,其位移输出量并非直接达到固定的参考值,而是首先在几个毫秒内迅速达到参考值的约90%,然后再缓慢地伸长剩余的变形并逐渐接近最终参考值.这一过程十分缓慢,甚至长达数分钟,这种线性称为压电陶瓷的蠕变特性.正是由于压电陶瓷存在迟滞和蠕变特性,就必须通过闭环反馈的方式对这种非线性特性进行校正,从而保证快反镜的光束指向精度.电阻应变片具有分辨率高、频率响应特性好、体积小、结构简单、便于集成等特点,被广泛应用于各种压电陶瓷精密驱动装置中.通常而言,应变片粘贴在压电陶瓷表面,用于测量压电陶瓷的伸长量,进行闭环反馈控制,如图4中应变片位置2所示.然而在所设计的快反镜中,压电陶瓷的输出位移并非直接作用于反射镜,而是经过放大机构放大后作用于反射镜.那么,应变片粘贴在压电陶瓷表面并不能够将放大机构的特性引入到闭环控制回路中,而放大机构自身的非线性特性必然会影响快反镜的指向精度.对于所设计的放大机构在变形时,最大位移量在输出端即E点(见图3(a)),而支点C(见图3(b))附近的应变量相对较大,且空间相对充足.因此,在此处粘贴应变片作为反馈传感器,完成快反镜的闭环控制.应变片的粘贴位置如图4中应变片位置1所示,结合局部尺寸的限制,应变片选择中航电测BF1000-4BB-AN型号.粘贴位置保证应变片的竖栅位于支点C处,实际中仅使用应变片的竖栅部分.
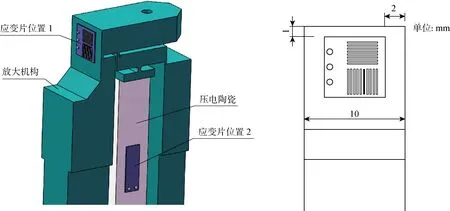
图4 电阻应变片粘贴位置示意图
1.3 驱动控制设计
压电陶瓷存在迟滞和蠕变的特性,就必须通过闭环反馈的方式对这种非线性特性进行校正,从而保证快反镜的光束指向精度.此外,由于采用了二级杠杆式放大机构,必须考虑结构非线性的影响,所以根据1.2节的分析,将应变片粘贴在放大机构的支点C附近,共计4个应变片.快反镜的驱动原理如图5所示,以单轴偏转为例.两个放大机构中的压电陶瓷分别为P1、P3.压电陶瓷P1的负极接地,正极与压电陶瓷P3的负极相连,作为电压输入端U,而压电陶瓷P3的正极则连接固定高压100 V.当U=50 V时,施加在压电陶瓷P1、P3上的电压相同,则其伸长量相同,此时反射镜无偏转.当U=100 V时,压电陶瓷P1上的电压为100 V,伸长量最大,而压电陶瓷P3上的电压则降至0,伸长量最小,此时反射镜发生偏转.同理,当U=0时,反射镜向另一侧偏转.各放大机构上应变片的连接方式、工作原理与压电陶瓷相似,区别在于应变片的恒压为5 V,输入端变为输出端(即反馈信号),电压范围为0~5 V.因此,在快反镜系统中,陶瓷的输入电压0~100 V对应于应变片的反馈电压0~5 V.
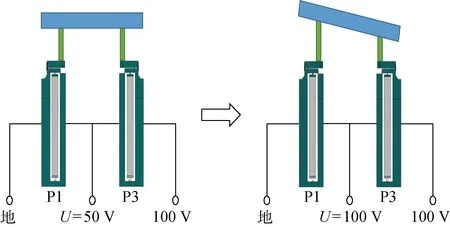
图5 快反镜工作原理
压电快反镜驱动控制回路采用闭环设计,控制流程框图如图6所示,以单轴偏转为例.指令信号(0~5 V)与应变片的反馈信号进行比较后进入比例-积分-微分(PID)控制模块,产生功率放大器的信号,功率放大器将0~5 V的控制信号进行电压和功率放大至0~100 V,从而驱动压电陶瓷,实现快速精确闭环控制.
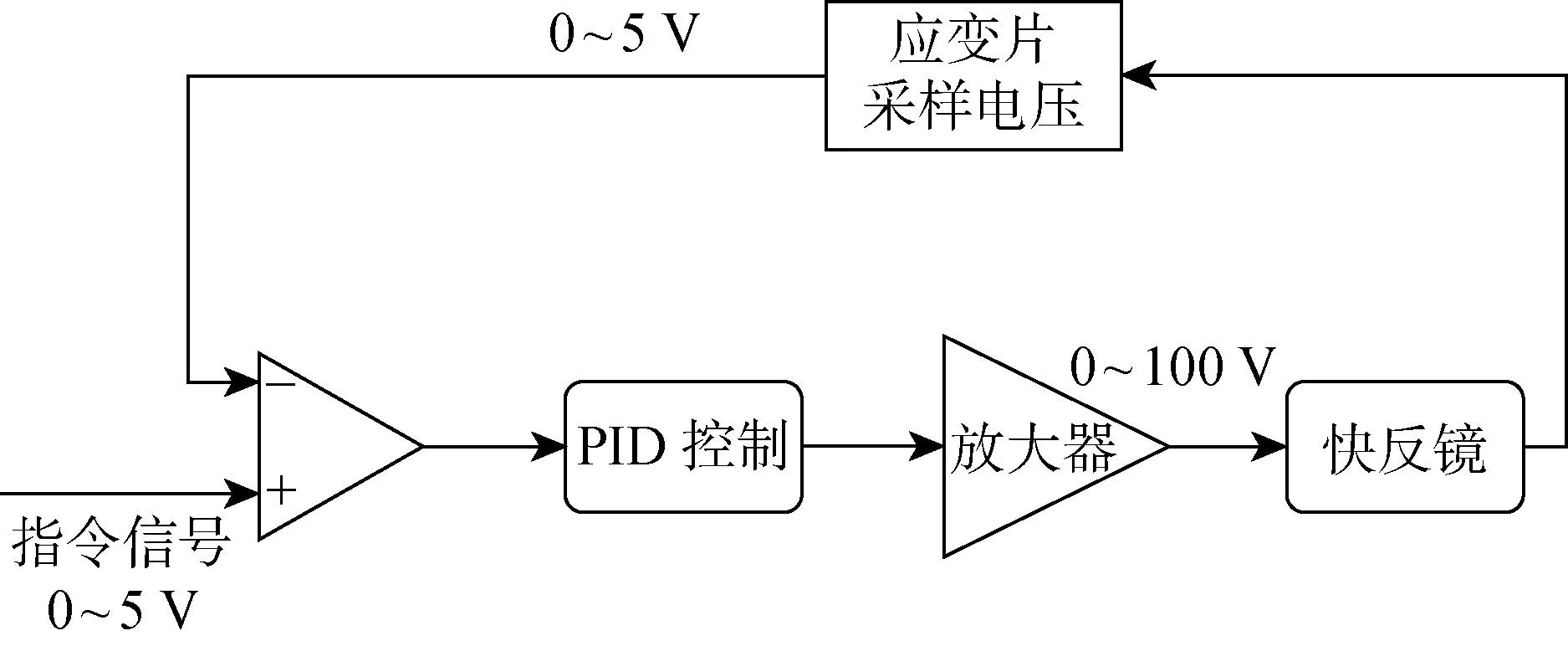
图6 快反镜闭环反馈控制框图
2 有限元仿真
接下来通过有限元仿真,从偏转范围与模态频率两方面对结构模型进行校核,进而对所提结构设计方案进行验证.
进行有限元分析前,对快反镜三维模型进行简化,去除圆角、倒角等不影响计算结果的设计细节.然后,采用ANSYS Workbench软件进行快反镜模型的网格划分、材料参数以及边界条件设置.快反镜采用的结构材料及其基本参数如表3所示.其中:ρ为密度;E为弹性模量;μ为泊松比.压电陶瓷为各向异性材料,但为方便计算,根据表1中的刚度数值,将其简化等效为各向同性的弹性模量和泊松比.反射镜为石英玻璃,尺寸为70 mm×50 mm,厚度为6 mm,并定义反射镜短轴为x轴,长轴为y轴.
表3 快反镜材料属性
边界条件为快反镜底座4个螺栓固定.由于压电陶瓷只能伸长不能收缩,快反镜在工作时,同一轴上的两个压电陶瓷先同时加电压伸长25 μm,然后其中一个压电陶瓷继续加电压再伸长25 μm,另一个陶瓷则降压至0,实现偏转运动.仿真分析时为方便起见,对同一偏转轴上的两个压电陶瓷分别施加25 μm的位移量,但方向相反.计算获得的快反镜整体变形情况如图7所示.根据图7可知,快反镜绕x轴转动的最大变形量约为0.892 mm,绕y轴转动的最大变形量为0.637 mm,进而计算偏转角度分别为0.892 mm/35 mm≈25.49 mrad和0.637 mm/25 mm≈25.48 mrad.
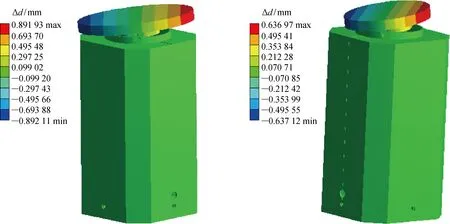
图7 快反镜整体变形图
同样,采用快反镜底座4个螺栓固定的边界条件,计算获得的快反镜谐振频率和模态振型,如图8所示,其中f为谐振频率.整机结构绕x轴偏转的谐振频率约为106.2 Hz,绕y轴偏转的谐振频率约为129.5 Hz.由于反射镜为椭圆形,绕x、y轴的转动惯量不同,导致快反镜绕x、y轴的固有频率存在一定差异.
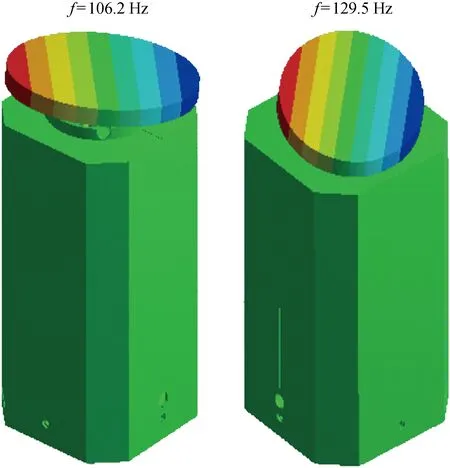
图8 快反镜模态振型
3 实验与分析
对基于放大机构的压电陶瓷快反镜性能进行测试,产品质量约为724 g,快反镜产品实物(带反射镜)如图9所示.实验测试内容包括偏转范围、闭环线性度、重复精度以及机械谐振频率.测试系统由快反镜、驱动控制器、信号发生器、光电经纬仪、光电自准直仪、频响分析仪以及台式计算机组成.其中,信号发生器产生驱动电压信号,控制器驱动快反镜偏转,光电经纬仪和光电自准直仪测量偏转角度,频响分析仪分析快反镜的幅频响应曲线,以获取谐振频率值.
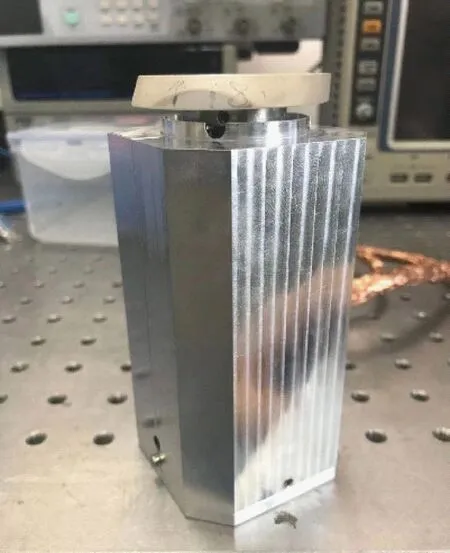
图9 快反镜实物照片
3.1 偏转范围及线性度
由于所设计的快反镜偏转范围高达50 mrad,常用的光电自准直仪量程(±6 mrad)无法满足测量要求,所以采用光电经纬仪进行角度测量.光电经纬仪不具备连续测量记录功能,只能单点读数.偏转范围测量中,输入驱动电压范围0.5~4.5 V,分为17个测点,即每次增加0.25 V电压,由光电经纬仪记录每个测点的角度位置.光电经纬测量的是绝对角度位置,以0.5 V电压位置为零点,其余各点角度值减去零点角度值,即获得快反镜在不同电压的角度偏转值.基于测试数据,绘制快反镜x轴和y轴偏转角度与输入电压的关系曲线,并进行一阶线性拟合,如图10和11所示.其中:θ为偏转角度;e为拟合误差.快反镜偏转角度测试结果如表4所示,其中:θx为绕x轴偏转角度;ex为绕x轴最大残差;σx为绕x轴线性度;θy为绕y轴偏转角度;ey为绕y轴最大残差;σy为绕y轴线性度.
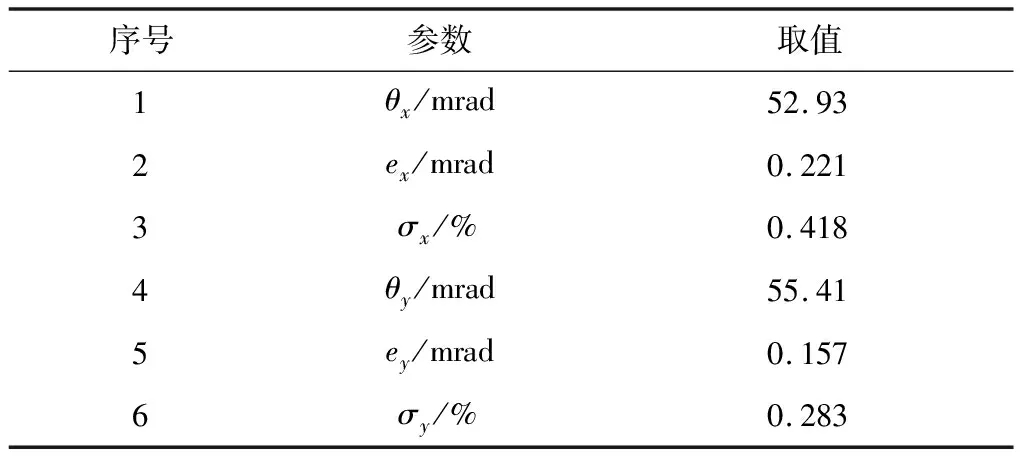
表4 快反镜偏转角度测试结果
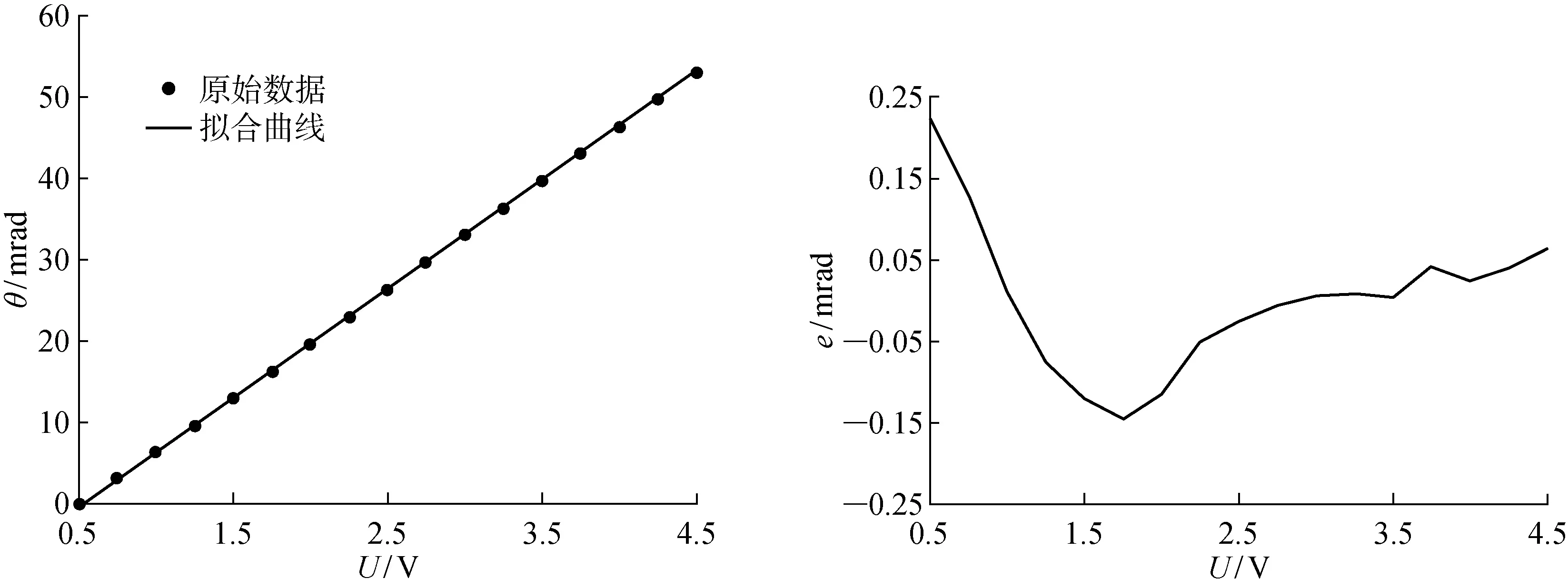
图10 x轴偏转角和拟合偏差
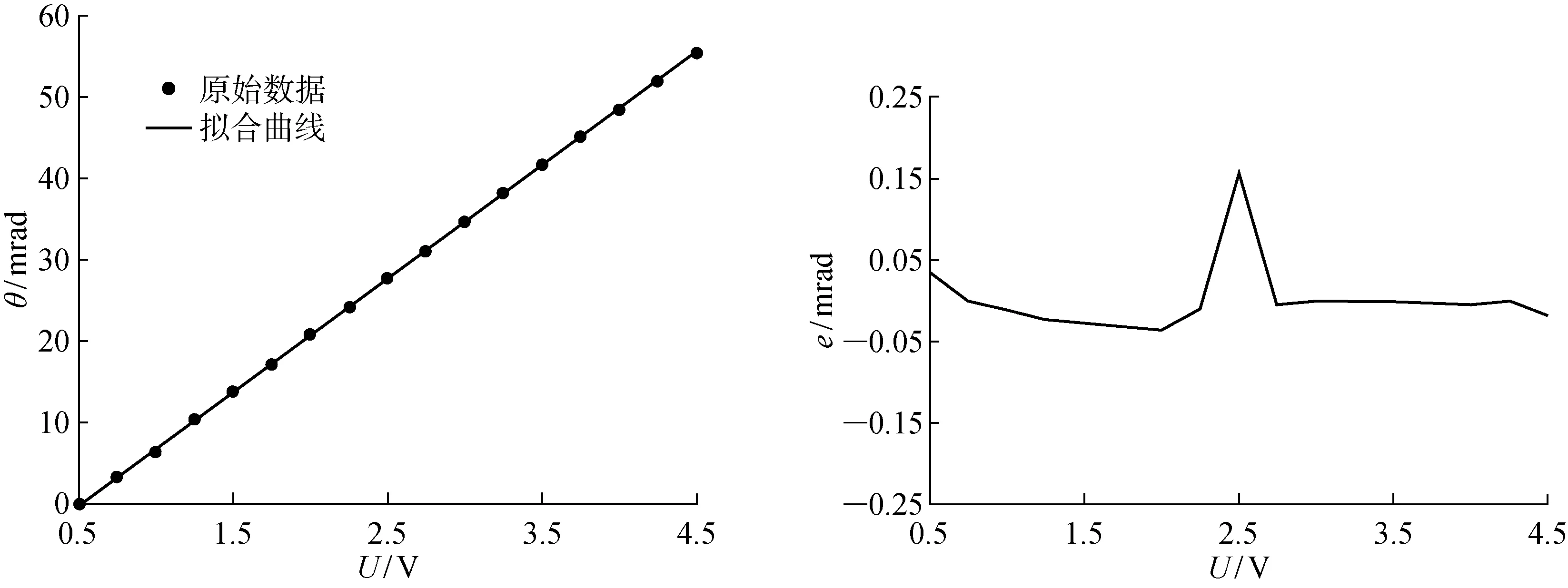
图11 y轴偏转角和拟合偏差
3.2 闭环重复精度
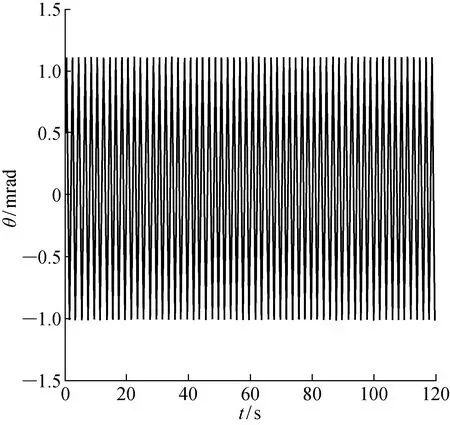
图13 y轴偏转角度曲线
测试方法:由信号发生器产生频率为0.5 Hz、幅值为0.2 V、偏置为2.5 V的正弦交变电压,通过驱动控制器同时加载在快反镜的x轴和y轴上,并利用光电自准直仪连续记录2 min,共 3 000 组角度值,绘制曲线分别如图12和13所示,其中t为时间.
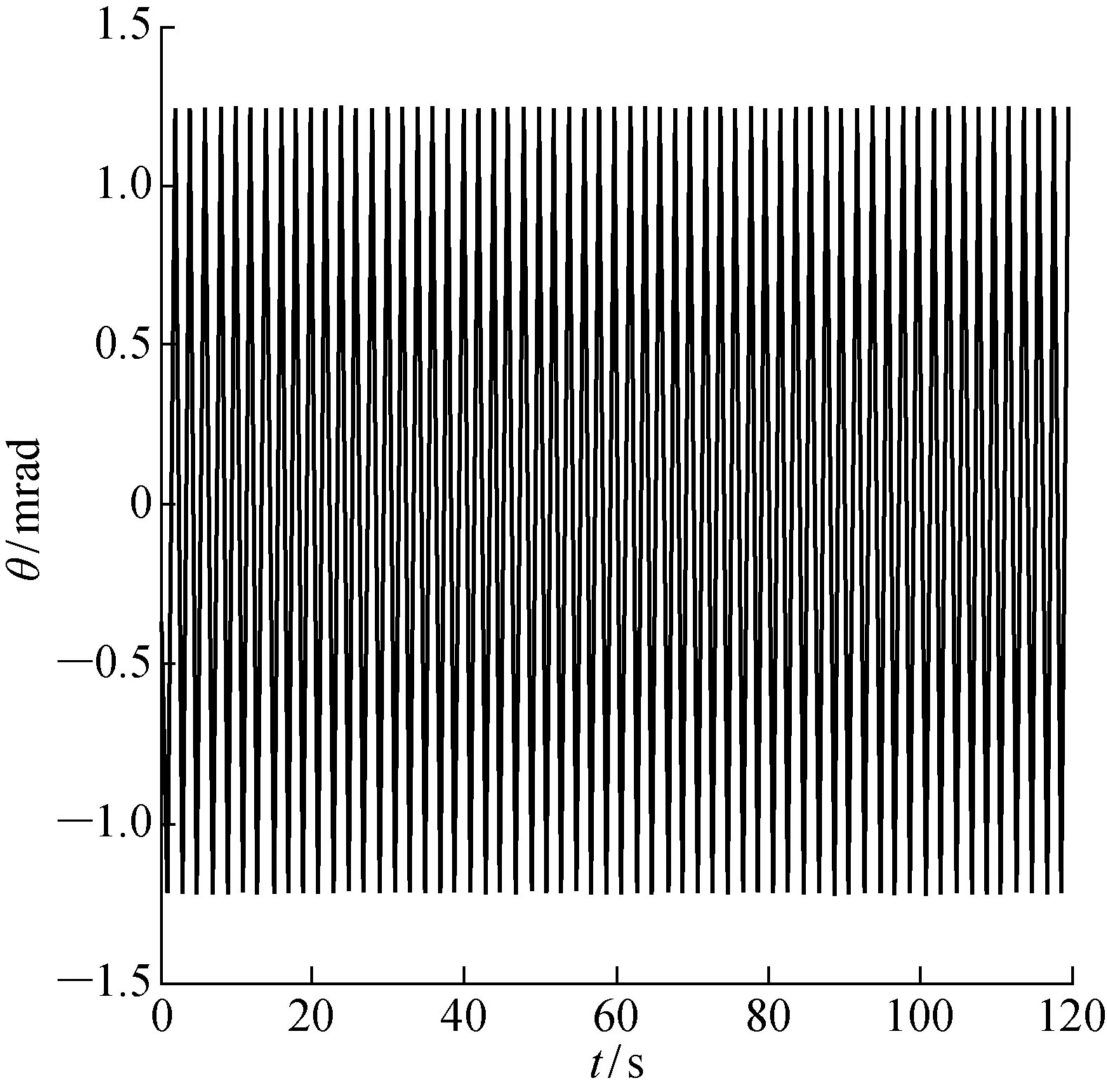
图12 x轴偏转角度曲线
3.3 机械谐振频率
将驱动控制器的输入和输出端口分别连接到频响分析仪的对应接口,分析仪设置0.1 V、1~1 000 Hz频率范围的扫描信号,分别对快反镜x轴和y轴进行扫频分析获得频响曲线,如图14和15所示.其中:A为幅值;Φ为相位;fn为扫描频率.
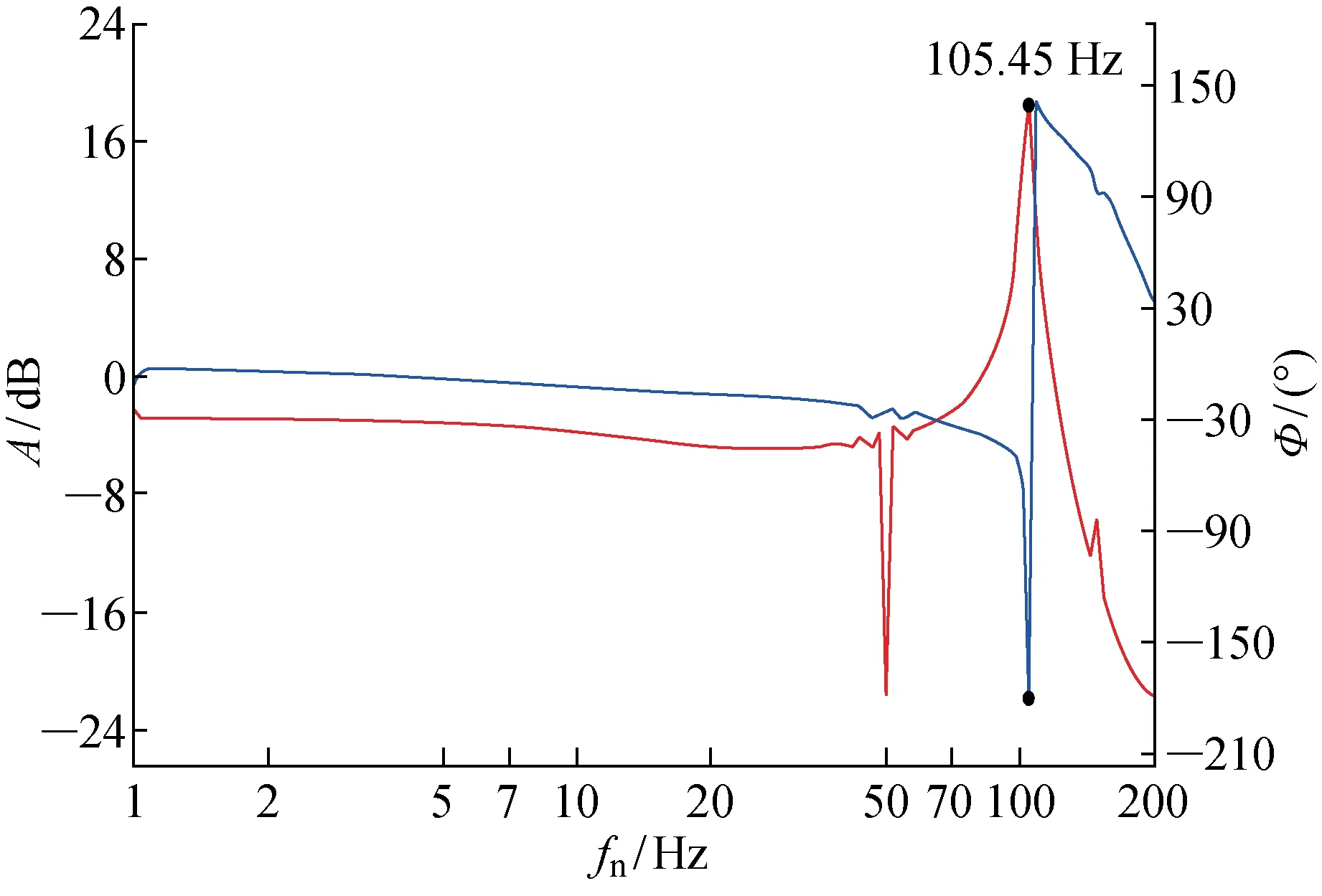
图14 x轴频响曲线
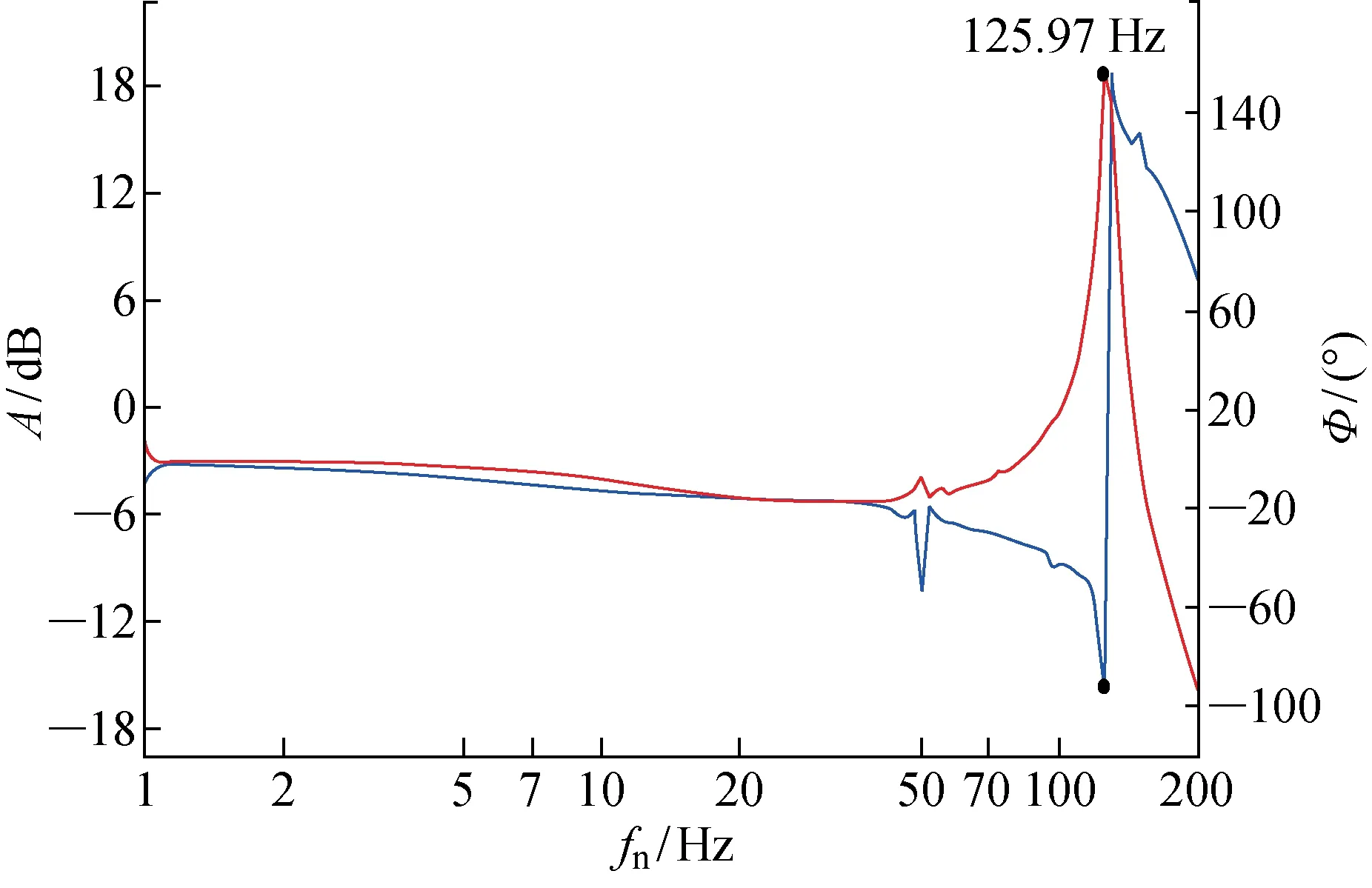
图15 y轴频响曲线
由图14和15可知,快反镜绕x轴的机械谐振频率为105.45 Hz,绕y轴的机械谐振频率为125.97 Hz,与有限元仿真结果较接近.另外,50 Hz处出现峰值的原因为驱动控制器供电电源(220 V,50 Hz)的干扰,需进一步做好连接线缆的外层屏蔽.
对所研制快反镜的测试指标整理如表5所示,其中:σ为线性度;δ为重复精度;D为反射镜尺寸.由表5可知,相比于华中科技大学和上海技术物理研究所研制的放大式压电快反镜,本文研制的快反镜在偏转范围、线性度和定位精度上都有一定程度的提高.但与德国普爱纳米位移技术公司的S-335型快反镜产品指标相比,所研制的快反镜反射镜尺寸较大,偏转范围大于50 mrad,在线性度和重复精度上还有一定差距,需要进一步提高.
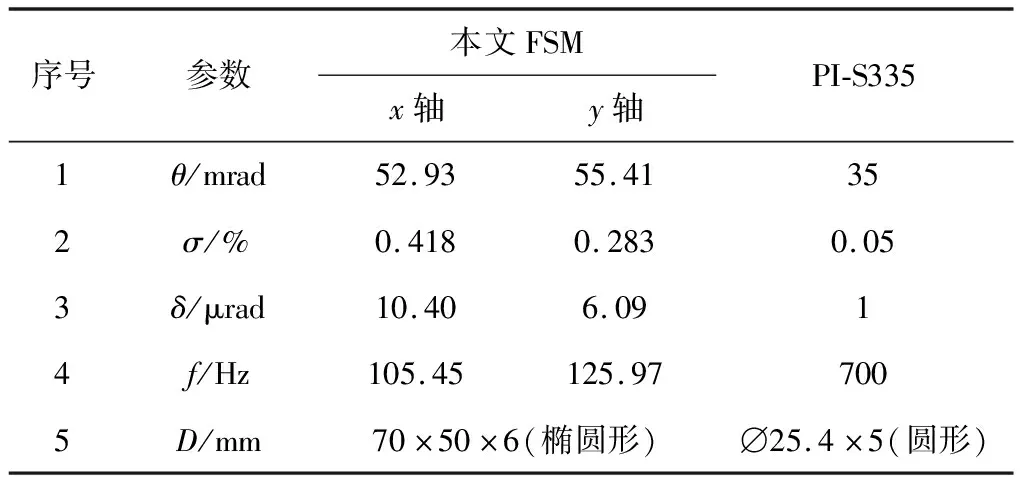
表5 快反镜指标对比
4 结语
本文针对直驱式压电陶瓷快反镜偏转范围较小的现状,设计了一款基于放大机构的新型压电快反镜.首先,采用二级杠杆式放大机构实现了压电陶瓷输出位移的放大,提出了将应变片粘贴在放大机构上实现闭环反馈的传感器设计方案.然后,通过有限元方法分析了结构的偏转范围和谐振频率.最后,实验测试结果表明,本文设计的新型压电快反镜偏转范围分别为52.93 mrad(x轴)和55.41 mrad(y轴),闭环线性度分别为0.418%和0.283%,能够满足大范围光束精确指向的要求.
猜你喜欢
新能源科技(2022年9期)2022-11-20
电工技术学报(2022年20期)2022-10-29
东北大学学报(自然科学版)(2022年6期)2022-07-08
北京航空航天大学学报(2021年7期)2021-08-13
航天返回与遥感(2021年1期)2021-03-16
空间控制技术与应用(2019年6期)2020-01-09
电子制作(2019年7期)2019-04-25
卷宗(2017年1期)2017-03-17
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学物理·高中(2016年4期)2016-05-11