
基于针孔成像像面参数提取的单板机镜头显微成像质量评价方法
2021-09-27 02:48吕浩文魏航信
应用光学 2021年5期
李 博,王 方,吕浩文,吴 伟,魏航信
(西安石油大学 机械工程学院,陕西 西安 710065)
引言
机器视觉的显微成像技术可用于微小物体表面形态的观测与分析[1],广泛应用于生物医学、工业生产与加工以及航天探测领域。Michael C等人采用显微成像技术研究解吸电喷雾电离中玻璃表面的样本移除问题[2];Nada N等人利用该技术研究光的散射成像,并将其应用于细胞组织结构分析与临床诊断等领域[3-4];Kim等人利用该技术提出采用一种显微成像系统实时监测热转换设备中的CaCO3污垢处理过程[5];Kassim等人通过显微成像获得机加工件表面纹理图像,用于分析研究刀具磨损程度[6];Liam Pedersen等人将显微成像技术应用于火星探测器,对火星上的土壤和岩石表面的形态纹理进行观测与分析[7]。然而,上述研究多采用专业显微物镜配合高性能电荷耦合器件(charge coupled device,CCD)实现高质量显微成像[8],尽管像差小、成像质量高,但它们的结构复杂,光路长且体积大,仅限于实验室环境下离线使用,难以适用于工业现场狭小空间的在线应用。单板机镜头可实现狭小空间内短光路、低倍率显微成像,采用这类镜头设计在线图像可视铁谱(on-line visual ferrograph,OLVF)探头,具有体积小、结构紧凑等特点,可被安装于装备油液循环系统的管路中,进行磨粒视觉特征获取与磨损过程在线监测[9-10]。目前,缺乏单板机镜头显微成像质量定量评价方法,OLVF探头难以获得较高清晰度磨粒图像,严重制约了OLVF技术发展。
场曲像差是影响单板机镜头显微成像质量的主要因素,现有近轴成像场曲与畸变模型均以镜头透镜组光学结构参数为基础进行建模评价[11-12],通过ImageMaster光学测试仪器测量场曲像差,进而评价光学镜头的成像性能。调制传递函数(modulation transfer function,MTF)作为定量描述线性不变系统成像性能的一个基本物理量[13],可反映光学系统信息传递能力,用于客观评价成像性能[14]。Chao.C等人利用在线光学测试设备获取手机镜头模组MTF[15];Lengwenus等人利用狭缝法获取红外光学镜头MTF[16];Samei与Micheal提出采用刃边法获得MTF用于评价X光照相成像系统性能[17];Liu等人采用MTF定量分析离焦距对大景深显微物镜成像质量的影响[18],证明了MTF方法可用于评价光学镜头性能的可靠性和准确性。尽管这些方法客观准确,但都以镜头光学结构参数和专业测试仪器为支撑,只适用于长光路光学镜头成像质量评价,难以满足小体积、短光路单板机镜头显微成像性能定量评价要求,因此需要专用的测试与评价手段解决OLVF显微镜头选型问题。
为了定量评价单板机镜头显微成像质量,利用针孔法分别获取不同像场位置的光斑图像,基于MTF理论计算单板机镜头倒置使用时显微成像测试系统总的MTF。建立了镜头透镜组MTF数学模型,提取边缘视场MTFA(modulation transfer function area)和MTFA相对变化率作为像面参数,用于评价单板机镜头成像清晰度与像面平整度。不同倍率条件下,提取4款被测单板机镜头的像面参数进行对比分析,确定最佳OLVF显微镜头。利用被测镜头分别获取RGB点阵图像,采用平均功率谱(average power spectrum value,APSV)、灰度平均梯度(gray mean gradient,GMG)及拉普拉斯算子和(laplacian summation,LS)评价点阵图像清晰度,验证本文方法用于单板机镜头显微成像质量定量评价的准确性和有效性。
1 显微成像系统MTF获取
单板机镜头显微成像测试系统结构如图1所示。白光LED平板光源作为透射光源,平板光源上方有星点靶标,光线透过星点靶标的微米级圆孔产生目标光源,星点靶标固定在X-Y方向定位台上。单板机镜头倒置安装于调焦机构中,被测镜头入曈作为系统出瞳,CMOS传感器位于调焦机构上方,光线通过单板机镜头透镜组与出瞳对焦后在CMOS像面上形成放大的光斑。

图1 显微成像系统示意图Fig.1 Schematic diagram of microscopic imaging system
测试之前需调整成像系统放大倍率,然后调节X-Y轴精密定位台,使光斑位于CMOS像面中心视场与边缘视场不同位置,获取光斑图像,并求取MTF,提取方法流程图如图2所示。
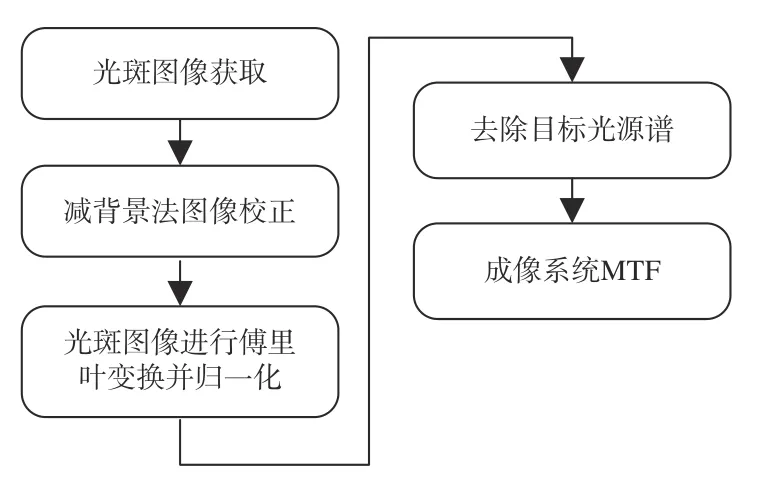
图2 MTF提取方法Fig.2 MTF extraction method
1)如图3所示,移动星点靶标,使目标光斑位于图像几何中心(0,0)位置,像面对焦确保光斑直径最小,获得中心视场位置的光斑图像;

图3 CMOS像面光斑分布示意图Fig.3 Distribution diagram of CMOS image spot
2)以图像几何中心为坐标参考点,沿x轴方向移动光斑至边缘视场(R, 0)位置,以图像几何中心为圆心、R为半径做圆,在圆周上选取n个坐标点,将光斑移至各个坐标点位置,依次捕获不同视场位置的光斑图像,并采用减背景法对光斑图像进行修正;
3)进行傅里叶变换获得光斑图像的像面谱,在空间频域内归一化处理像面谱,从中去除目标光源频谱,最后对所得结果进行取模运算求得单板机镜头显微成像系统的MTF。
针孔法获得的中心视场光斑图像如图4(a)所示。

图4 光斑图像MTF提取Fig.4 MTF extraction of spot image
假设镜头测试系统具有线性及空间不变性,系统的点扩展函数(point spread function,PSF)为FPS(x,y), 目标光斑为f(x,y), 光斑图像为g(x,y),那么g(x,y) 可表示为f(x,y)与FPS(x,y)之卷积,忽略随机噪声干扰,即有:

对(1)式进行二维傅里叶变换,令FMTmeas(ξ,η)为成像系统总的MTF,由卷积理论可得到FMTmeas(ξ,η)为

式中: ξ,η为空间频率;G(ξ,η)为光斑像面谱;F(ξ,η)为目标光源频谱,分别对两者进行归一化处理。已知CMOS像面分辨率为M×N,空间频域内移动G(ξ,η)坐 标至G(ξ−M/2,η−N/2),F(ξ,η)归一化之后可用BESINC函数表示[19],等价于目标光源引入的MTF。令目标光源孔径为d1,成像系统放大倍率为β,则成像系统FMTmeas(ξ,η)可表示为

式中:J1(x)为一阶Bessel函数,可表示为

利用(3)式对图4(a)进行处理,分别求取不同像场位置光斑图像所对应的FMTmeas(ξ,η),当d1=0.1 mm时,在 ξ∈[−100,100]和 η∈[−100,100]区间内的归一化FMTmeas(ξ,η)如图4(b)所示。为了实现单板机镜头显微成像质量评价,需确定镜头透镜组MTF,以提取评价参数。
2 像面参数提取
单板机镜头显微成像系统主要由CMOS图像传感器和镜头子系统组成,显微成像质量受到镜头透镜组、系统出瞳、CMOS像元尺寸以及传感器采样间隔共同影响,这些因素会造成目标光源成像质量下降。构建的系统成像模型如图5所示。假设成像系统总的光学传递函数(optical transfer function,OTF)为FOTmeas(ξ,η),若忽略CMOS相邻像素单元串扰的影响,则可表示为G(ξ,η) 与F(ξ,η)的比值,即为

图5 系统成像模型Fig.5 System imaging model

式中:FOTCMOS(ξ,η)为 CMOS传感器的OTF;FOTlens(ξ,η)为镜头子系统的OTF;N(ξ,η)为频域内随机噪声频谱函数。假设成像系统中的随机噪声很小(即有F(ξ,µ)>>N(ξ,µ)),对FOTmeas(ξ,η)取模可得到系统总的FMTmeas(ξ,η)为

式中:FMTlens(ξ,η)为单板机镜头子系统引入的MTF;FMTcmos(ξ,η)为CMOS传感器引入的MTF,可表示为

式中:FMTdetector(ξ,η)为CMOS像元尺寸引入的MTF;FMTsamp(ξ,η)为传感器采样间隔引入的MTF。假设CMOS像元尺寸为w×w,感光区域对每个像素单元的填充系数为100%,则像素孔径可表示为矩形函数p(x,y),则有:

对(8)式进行傅里叶变换,可求得FMTdetector(ξ,η)为
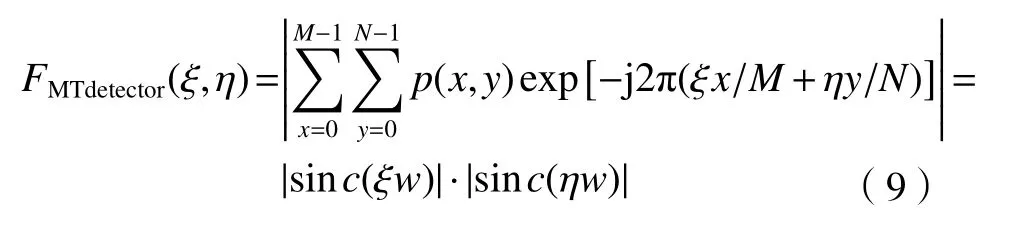
式中 sinc(x) 可 表示为 sin(πx)/πx。CMOS像素单元越小,则同一频率的FMTdetector值越大,表明像面分辨率越高。设定CMOS像面沿x、y方向的采样间隔均为 △x(图1所示),忽略像素阵列间隔,则可得空间频域内的FMTsamp为[20]

将(9)式和(10)代入(7)式,假设CMOS传感器的采样间隔等于像素单元的宽度(即为 ∆x=w),由(6)式和(7)式可推导出FMTlens(ξ,η)为

单板机镜头可被看作是由入瞳和镜头透镜组2部分组成,镜头入瞳作为测试系统的出瞳,沿 ξ与η方向分别提取测试镜头引入的一维MTF,则FMTlens(ξ,0) 和FMTlens(0,η)可分别表示为

式中:FMTpupil为 系统出瞳引入的MTF;FMTlens−A为镜头透镜组引入的MTF。利用非相干成像系统光学传递函数计算理论,对于具有圆形孔径的显微成像系统中心视场,系统出瞳可产生艾里斑光强分布,圆形出瞳引入的FMTpupil−C(ξ)可用衍射受限MTF表示[21]:
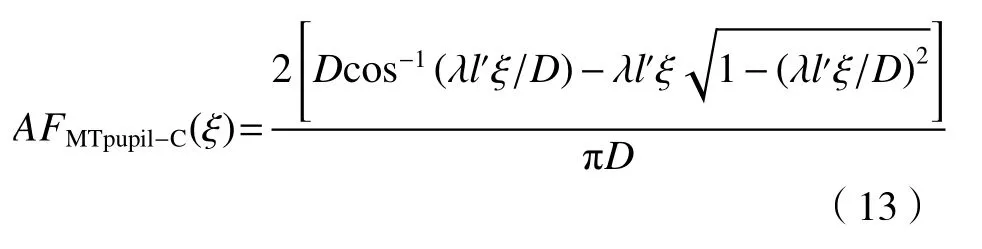
式中:D为系统圆形出瞳直径;D/λl′即为空间截止频率。对于显微成像系统的边缘视场,出瞳形状为椭圆。假设椭圆长短轴分别为a和b,那么边缘视场弧矢方向与子午方向引入的FMTpupil−S(ξ) 和FMTpupil−M(η)可分别表示为
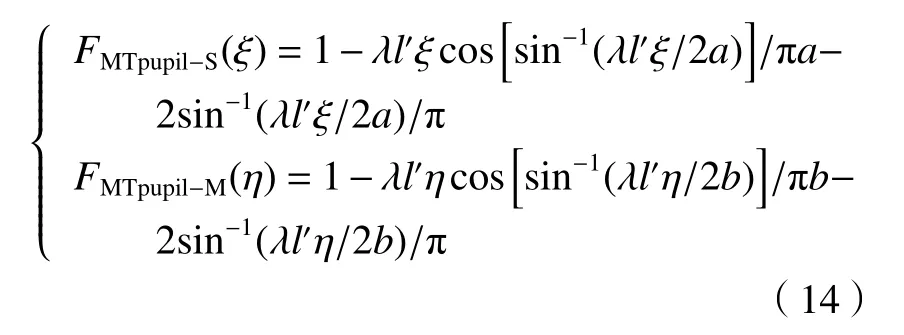
式 中:a为出瞳直径的1/2,即a=D/2;b等 于Dcosθ/2,其中θ为像方视场角。圆形光斑频谱具有良好的对称性,可使频域内边缘视场弧矢方向与子午方向频率取值相等(即有 ξ=η),经过计算分析可得弧矢方向MTF和中心视场MTF完全相同[22],表明FMTpupil−S(ξ) 与FMTpupil−C(ξ)相等。将(13)式和(14)式代入(12)式,结合(11)式可推导出镜头透镜组所引入的边缘视场弧矢方向与子午方向的MTF分别为

式中:λ为LED平板光源的主波长;l′为系统出瞳面到像面的距离。假设出瞳面与像方主平面重合,当镜头焦距为f时,则有l′=f(1+β) 。其中c osθ可表示为

式中:R为中心视场与边缘视场图像的光斑中心间距(见图3所示)。当f和 β为恒定值时,R值越大,cosθ越小。结合(15)式可见边缘视场弧矢方向的FMTlens−S(ξ)曲 线宽度不变,但子午方向的FMTlens−M(ξ)曲线变窄,表明随着θ增大,场曲像差随之增大,图像清晰度降低。
采用调制传递函数面积(modulation transfer function area,MTFA),即MTF曲线与空间频率轴所围的面积值定量评价镜头显微成像质量[23]。MTFA值越大,表明镜头所传递的信息量越多,成像 越清 晰。FMTlens−S(ξ)与FMTlens−M(ξ)曲线所对应的弧矢方向AMTFlens−S(ξ)和 子午方向AMTFlens−M(η)可分别表示为

式中: ξcutoff为空间截止频率,其值等于D/λf(1+β)。显微成像过程中,由于单板机镜头存在场曲像差,在图像中心视场对焦的情况下,从中心向边缘视场的像面清晰度逐渐降低。引入MTFA相对变化率来度量镜头场曲变化量,表征镜头显微成像的像面清晰度与平整性。首先利用(17)式分别计算如图3所示的2~7坐标位置光斑图像的边缘视场弧矢方向与子午方向的MTFA,求取MTFA平均值。令上述6个坐标位置光斑图像的弧矢方向AMTFlens−S平 均值为,子午方向AMTFlens−M平均值 为,则MTFA相对变化率可表示为与相对减小量与放大倍率的比值,即:

3 实验结果与分析
选取焦距、光圈数与出瞳直径等光学参数相同的4款商业镜头作为被测镜头(如图6所示),对其进行显微成像质量评价测试。像面中心对焦情况下分别获取不同视场位置的光斑图像,提取各个镜头的评价参数和对比显微成像质量评价参数,确定最佳成像镜头。显微成像测试系统主要部件的参数指标如表1所示。

表1 测试系统各部件参数Table 1 Component parameters of test system

图6 被测镜头Fig.6 Tested board lens
当β分别为1.5和2.0时,对被测镜头的显微成像质量进行测试,设置中心视场与边缘视场光斑位置的坐标间距R为0.8 mm,对不同视场位置的光斑图像进行傅里叶变换,根据(15)式计算空间频域内被测镜头的MTF曲线。当β=1.5时,计算可得ξ∈[0,100]区间内镜头透镜组的FMTlens−S(ξ)和FMTlens−M(ξ)曲线如图7所示。


图7 镜头 FMTlens−AS(ξ)和 FMTlens−AM(η)曲线(β=1.5)Fig.7 F MTlens−AS(ξ) and FMTlens−AM(η) curves of board lens(β=1.5)
改变成像系统光学放大倍率,当 β=2.0时,ξ∈[0,100]区间内的FMTlens−AS(ξ)和FMTlens−AM(ξ)曲 线如图8所示。


图8 镜头 FMTlens−AS(ξ)和 FMTlens−AM(η)曲线(β=2.0)Fig.8 F MTlens−AS(ξ) and FMTlens−AM(η) curves of board lens(β=2.0)
由图7和图8可见,随着 ξ值的增大,MTF值逐渐减小,表明边缘视场的高频信息衰减严重,图像细节轮廓分辨率降低。当 ξ≥10 lp/mm时,同一频率下弧矢方向FMTlens−S与 子午方向FMTlens−M存在较大的距离偏差,表明镜头存在场曲像差,因而影响边缘视场显微成像质量。当 β 增大时,FMTlens−S与FMTlens−M之间的距离偏差随之减小,表明视场范围内的场曲像差减小,边缘视场的图像解析度提高。利用(17)式和(18)式分别计算镜头显微成像质量评价参数和计算得到4款镜头评价参数值如表2所示。

表2 被测镜头评价参数值Table 2 Evaluation parameter values of tested board lens
在β=2的条件下,利用这4款被测镜头分别获取像元尺寸为100 μm×100 μm的RGB点阵图像,如图9所示。采用平均功率谱值(average power spectrum value,APSV)、灰度平均梯度(gray mean gradient,GMG)及拉普拉斯算子和(laplacian summation,LS)3种客观方法定量评价RGB图像的清晰度[23-24],以验证本文提出方法评价结果的正确性。假设RGB点阵图像中无噪声干扰,傅里叶变换求取图像一维平均功率谱如图10所示。


图9 镜头RGB点阵图像Fig.9 RGB bitmap image of board lens

图10 平均功率谱曲线对比Fig.10 Comparison of average power spectrum curves
APSV、GMG及LS参数值越大,图像分辨率越高,RGB图像的细节轮廓越清晰,计算结果如表3所示。

表3 镜头RGB点阵图像清晰度评价参数Table 3 Definition evaluation parameters of board lens RGB bitmap images
由图10可见,随着频率的增大,RGB点阵图像的平均功率谱幅值逐渐衰减。周期每像素宽度在0~0.1范围内,平均功率谱的低频分量幅值迅速衰减,然后急剧增大,Lens2镜头所对应的功率谱低频分量幅值波动最大,表明该镜头的RGB灰度图像反差较大,像面对比度较高。在0.1~0.5范围内,随着频率的增大,Lens2镜头的RGB点阵图像高频分量幅值衰减程度较小,表明该镜头获取的图像分辨率较高,图像细节轮廓较为清晰。
由表3可看出,反映Lens2镜头显微成像清晰度的APSV、GMG及LS参数值最大。由图9(b)可见,RGB图像边缘视场对比度与分辨率较高,细节轮廓清晰可辨、RGB点阵色彩鲜明,表明Lens2的光学像差较小,更适用于短光路、低倍率显微成像。Lens3和Lens4镜头的成像清晰度评价参数值均小于Lens2,由图9(c)和图9(d)可见,中心视场与边缘视场的点阵图像清晰度较好,但RGB三基色图像颜色产生失真,表明这2款镜头存在较大光学色差,无法准确解析目标磨粒的表面颜色特征。相比之下,Lens1镜头的评价参数值最小,图9(a)RGB点阵图像边缘视场的像面模糊、分辨率低,表明Lens1存在较大场曲像差,图像细节轮廓难以识别、清晰度差。综上所述,Lens2镜头获取的RGB点阵图像清晰度最好,表明其显微成像性能最佳,与本文提出方法的评价结果一致,适用于单板机镜头显微成像质量的定量评价。
4 结论
本文提出采用弧矢方向MTFA的平均值、子午方向MTFA的平均值和MTFA相对变化率作为像面参数,对单板机镜头显微成像性能进行定量评价。运用针孔法获得单板机镜头显微成像不同视场位置的光斑图像,以此为基础,通过傅里叶变换提取单板机镜头显微成像系统的MTF。建立了单板机镜头透镜组MTF模型,基于边缘视场弧矢方向与子午方向的MTF曲线提取镜头显微成像质量评价的像面参数。对焦距、光圈数及出瞳直径相同的4款单板机镜头进行显微成像性能定量评价实验,确定了最佳显微成像镜头。分别采用4款被测镜头获取RGB点阵图像,从中提取平均功率谱值、灰度平均梯度以及拉普拉斯算子和评价RGB点阵图像清晰度,间接反映被测镜头成像性能,其结果与本文提出方法的评价结果相符,验证了像面参数评价方法用于单板机镜头显微成像性能定量评价的正确性和有效性,对于指导低倍率OLVF显微成像系统设计具有一定的指导意义。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
现代电子技术(2022年18期)2022-09-17
中国光学(2021年6期)2021-11-25
科学技术创新(2021年25期)2021-09-11
家庭影院技术(2020年11期)2020-12-28
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
中国医疗设备(2019年1期)2019-01-15
现代电子技术(2016年15期)2016-12-01
中国医疗美容(2015年1期)2015-07-12
