履带式变形机器人楼梯攀爬运动控制研究*
2021-09-27 12:08崔瑞超司静静迟明路
河南工学院学报 2021年3期
崔瑞超,司静静,迟明路
(1.河南工学院 电气工程与自动化学院,河南 新乡 453003;2.河南工学院 智能工程学院,河南 新乡 453003)
0 引言
随着机器人技术、人工智能技术的迅速发展,履带式变形机器人在民用生活、军用实战、工业生产等方面已得到广泛的应用[1-2]。目前,履带式变形机器人应用于平坦环境的研究已经相当成熟,但对履带变形机器人越障的研究还有很大的提升空间[3-4]。众所周知,楼梯是环境中一种最典型、最特殊的障碍物,研究履带式变形机器人攀爬楼梯的运动控制具有重要的实际意义。
1 总体设计
本文提出一种履带式变形机器人攀爬楼梯控制系统,采用STM32F103作为主控芯片,主要包括主控部分、信息采集部分、执行部分。信息采集部分负责感知环境信息和机器人的机身信息,主控部分负责分析感知到的信息并做出对应的任务规划,执行部分负责完成规划的运动任务。系统整体具有感知环境信息、任务规划以及决策执行等方面的能力,系统框图如图1所示。

图1 系统框图
信息采集部分包括超声波测距模块、烟雾测量模块、姿态测量模块、温湿度测量模块;主控部分接收并处理采集到的数据信息,规划路径和向执行模块发送行为指令;执行部分包括电机、编码器、减速器、驱动电路,根据主控部分发出的行为指令对电机进行控制,并将实时运行信息反馈给控制器。机器人运动控制平台如图2所示。

图2 机器人运动控制平台
2 硬件设计
根据总体设计及功能要求,硬件部分主要包括电源模块、通信模块、传感器模块、主控部分、驱动控制模块、电机。硬件设计框图如图3所示。
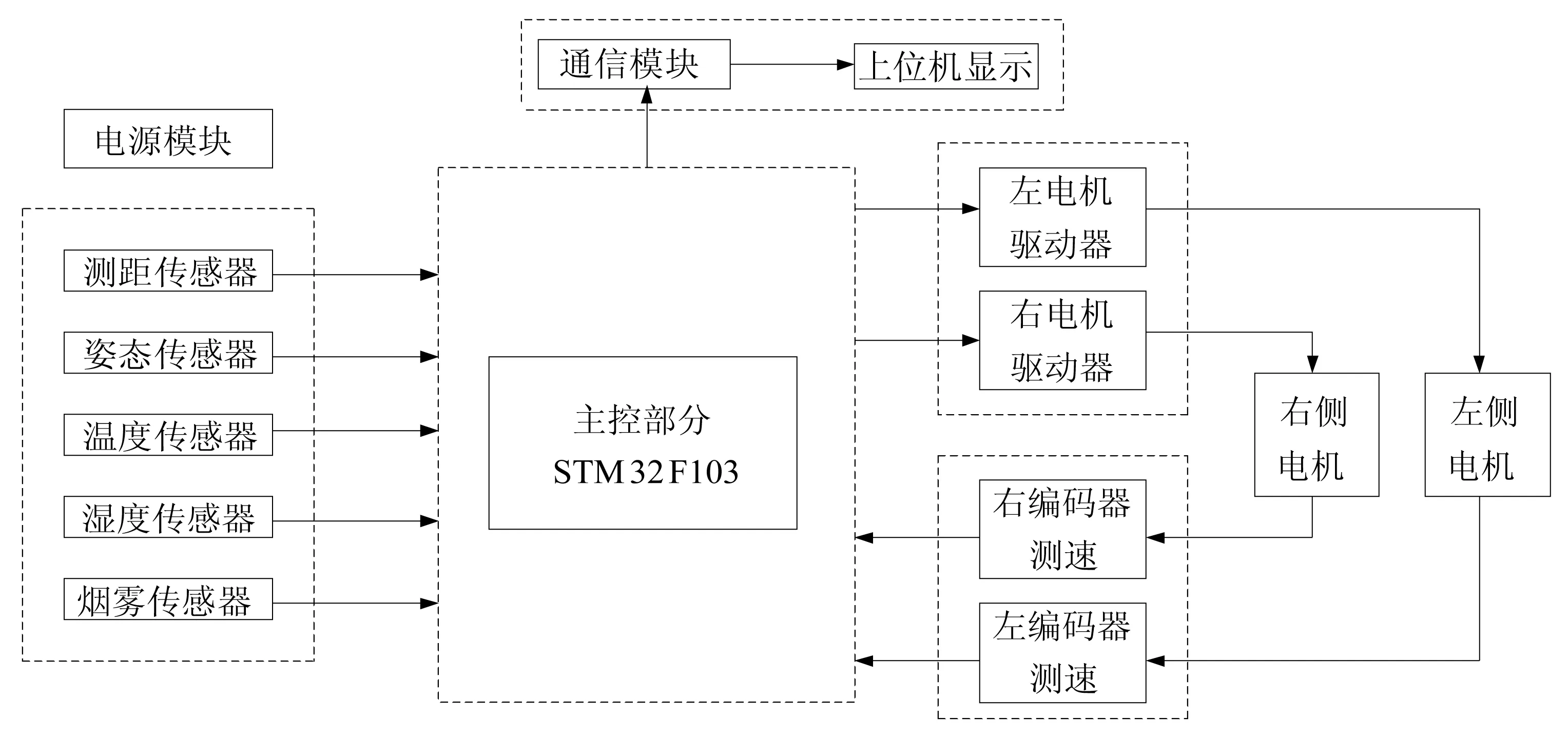
图3 硬件设计框图
2.1 STM32F103主控器
主控部分是整个控制系统的核心,负责处理传感器模块采集到的数据信息,实现对执行部分的控制,使整个系统达到预期的功能要求。
主控器使用STM32F103芯片,该芯片采用Cortex-M3内核架构。STM32F103的SRAM和FLASH分别为64KB、512KB,处理器为32位,CPU主频为72MHz,具有2个高级定时器、4个通用定时器、2个基本定时器、1个CAN、1个USB、1个SDIO接口、1个FSMC接口、1个12位DAC、3个12位ADC、2个IIC、3个SPI、5个串口、112个通用I/O口。STM32F103具有电压能耗低、处理性能高、使用空间大、成本低、实时性能强、集中度高、开发利用相当方便等优点[5-6],可以满足使用者的各种要求。

图4 STM32F103主控器
2.2 测距传感器
测距传感器采用超声波模块,利用超声波测距原理探测机器人到两侧障碍物的距离[7],传感器原理如图5所示。
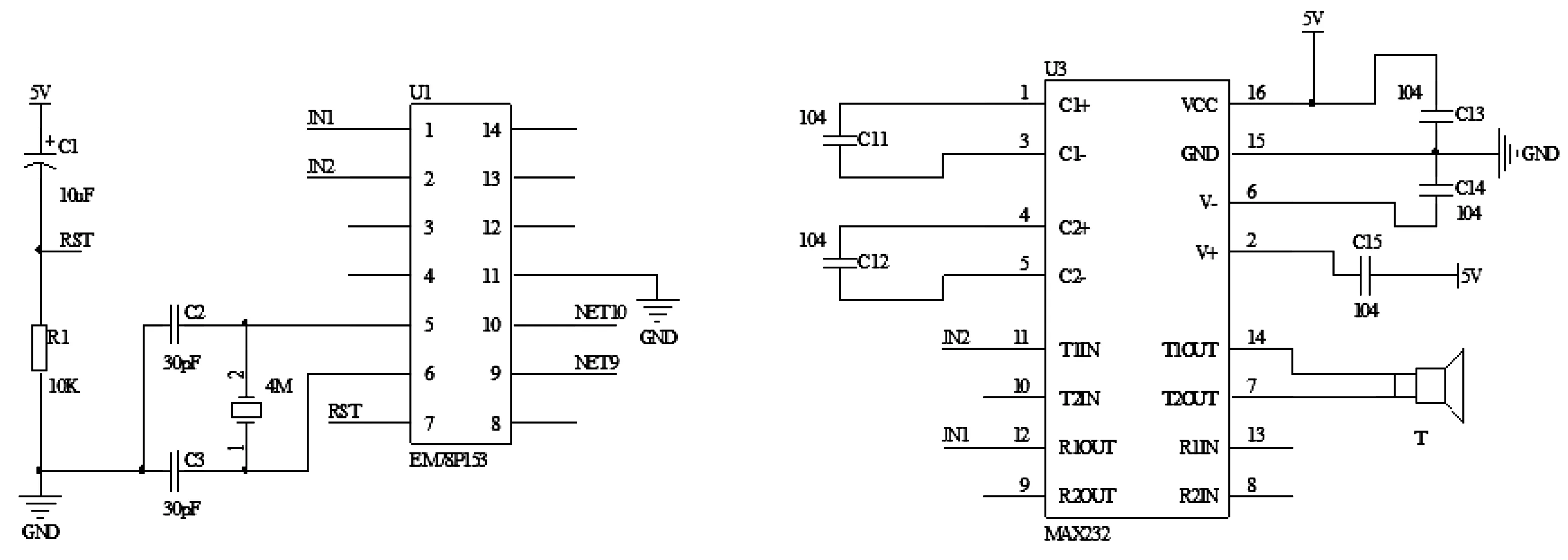
图5 测距传感器工作原理图
2.3 姿态传感器
姿态传感器选用可以独立完成姿态算法处理的MPU-6050传感器,该传感器通过姿态运算,可以把测量的模拟量转化为数字量,算出俯仰角、偏航角、翻滚角[8-9]。其工作原理如图6所示。

图6 姿态传感器工作原理图
3 软件设计
履带式变形机器人在攀爬楼梯过程中的两个控制变量分别为位置偏移比值Q和偏航角θ。位置偏移比值Q通过对测距传感器采集的数据进行计算得到,偏航角θ通过对姿态传感器采集的数据计算得到。自主攀爬楼梯控制框图如图7所示,dL、dR分别表示机器人距离楼梯左侧和右侧的距离,Q表示离楼梯左右两侧距离的比值,V为机器人的匀速移动速度。
行驶方向控制器的主要作用是根据传感器测量出的偏航角判断机器人的运行方向,其优先级最高。在攀爬过程中,主控部分首先要判定机器人的偏航角度;当机器人偏航角度较大时,履带可能会出现打滑现象,导致机器人倾翻。居中位置控制器的主要作用是控制机器人沿楼梯中间位置爬行,其优先级低于行驶方向控制器;机器人在攀爬过程中,若偏航角度超过主控部分设定的角度限值,行驶方向控制器发生作用;若没有超过角度限值,居中位置控制器发生作用,并调节位置偏移比例值。
履带式变形机器人以速度V匀速爬行时,主控部分根据传感器采集的数据信息得出的偏航角度和位置偏移比值来控制输出的脉冲宽度调制信号,调节左右电机的速度。
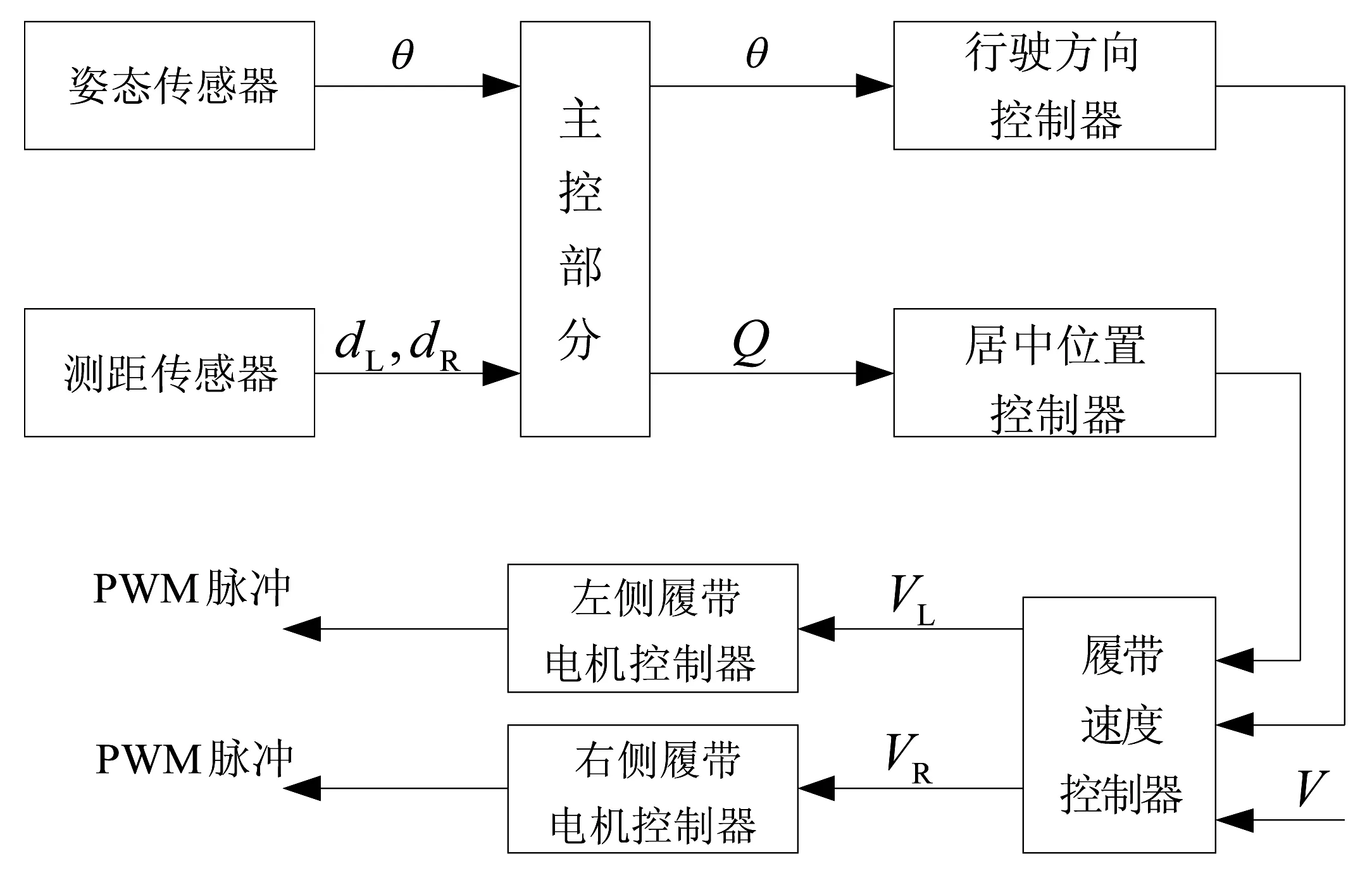
图7 自主爬楼梯控制框图
3.1 摆臂分析
履带式变形机器人的履带臂可以实现0—360°旋转,当其遇到楼梯台阶等垂直障碍时,它的履带臂会进行90°翻转完成攀爬任务。图8为运动模型示意图。

图8 运动模型示意图
在图8中,(X、O、Y)是世界坐标系,(XR、OR、YR)是位于机器人中心的坐标系,XR与YR为正交关系,XR表示机器人的运行方向,VL和VR分别代表左轮和右轮运动速度,b表示机器人车身宽度。机器人在运行中偏离X轴的角度用θ表示,定义θ>0表示机器人做逆时针方向运动,θ<0表示机器人做顺时针运动。
对运动模型进行数学分析[10],可以得到机器人在图形中的坐标变化。机器人运动的坐标用(x,y)表示。设点(0,0)为机器人的起始坐标,经过一段时间t,运动轨迹x(t)、y(t)、θ(t)满足:

(1)

(2)

(3)
机器人的履带臂上安装有驱动电机,机器人遇到楼梯时通过摆臂运动实现攀爬前进。摆臂运动模型和摆臂履带系统如图9所示。
设t=0时,机器人位于原点O处,t时间后,机器人以角速度ω转动左右履带前臂至旋转角度θ处,可得出:
θ=ω·t
(4)
当机器人两个履带前臂的驱动电机接收到相同大小、相同方向的速度信号时,机器人的旋转角速度ω为:
(5)
式中,D1表示电机与旋转臂上齿轮数之比,即减速比;n表示电机转速,单位为r/min。由式(4)、(5)得:
(6)
通过对摆臂运动进行数学分析得出,当机器人旋转履带臂的驱动电机接收到同向同速信号时,机器人会做出摆臂运动来完成攀爬楼梯任务。

图9 摆臂运动模型和摆臂履带系统
3.2 爬楼梯控制研究
履带式变形机器人在攀爬楼梯时,运动姿态直接影响攀爬效果,所以,机器人的姿态控制是本文主要的研究目标。为了更好地识别环境信息,更准确地判断机器人姿态,机器人本体安装有传感器模块,主控器将传感器采集到的信息进行加权融合计算;计算后的数据更接近实际值,然后再将数据与主控器给定的目标指令进行比较;当比较误差较大时,机器人会调节电机转速来减小误差,调整机器人姿态。因此,机器人可以按照设定的轨迹完成攀爬楼梯任务。运动控制流程如图10所示。

图10 运动控制流程图
3.3 控制算法设计
PI(Proportional Integral)调节器是由比例、积分组成的一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例积分和积分通过线性组合构成控制量,对被控对象进行控制。
(1)比例环节是对系统在某一时刻产生的偏差做出反应,即当出现偏差时,向着偏差变小的环节进行调节[11];
(2)积分环节是把偏差变化的累加输出,当出现偏差时积分输出就会累加,输出控制量来消除偏差[12]。
离散的PI表达式为:
(7)
式中,KP是比例系数,e(k)为第k次采样时刻输入的偏差,u0为PI控制的初值,KI是积分系数,T表示采样的周期,TI表示为积分常数。
若采样周期T很短,离散过程有可能接近模拟控制过程,若被控对象是变化的,变化的增量为Δu(k)。
增量式PI表达式为:
(8)
式中,KI为积分系数,KP为比例系数,u0为初始值。由式(7)、(8)得:
Δu(k)=KP[e(k)-e(k-1)]+KIe(k)
(9)
式中,e(k-1)、e(k)分别为第k-1次和第k次采样时输入的偏差。
机器人攀爬楼梯控制的目标就是调整运动姿态,姿态传感器检测机器人位置信息,PI调节器控制机器人两侧电机的运行速度,进而达到调整机器人姿态的目的。机器人姿态控制框图如图11所示,当偏航角度与目标角度θ出现偏差时,机器人会通过PI调节器调节电机转速,实现运动姿态控制。

图11 机器人姿态控制框图
机器人开始楼梯攀爬动作时,通道1、2打开,机器人左右电机等速转动,若机器人在运行过程中出现方向偏移,PI调节器自动调节两侧电机速度,进而机器人会自动校正轨迹。为实现对机器人运动姿态的控制分析,本文对机器人左右电机速度进行MATLAB仿真,结果如图12所示。
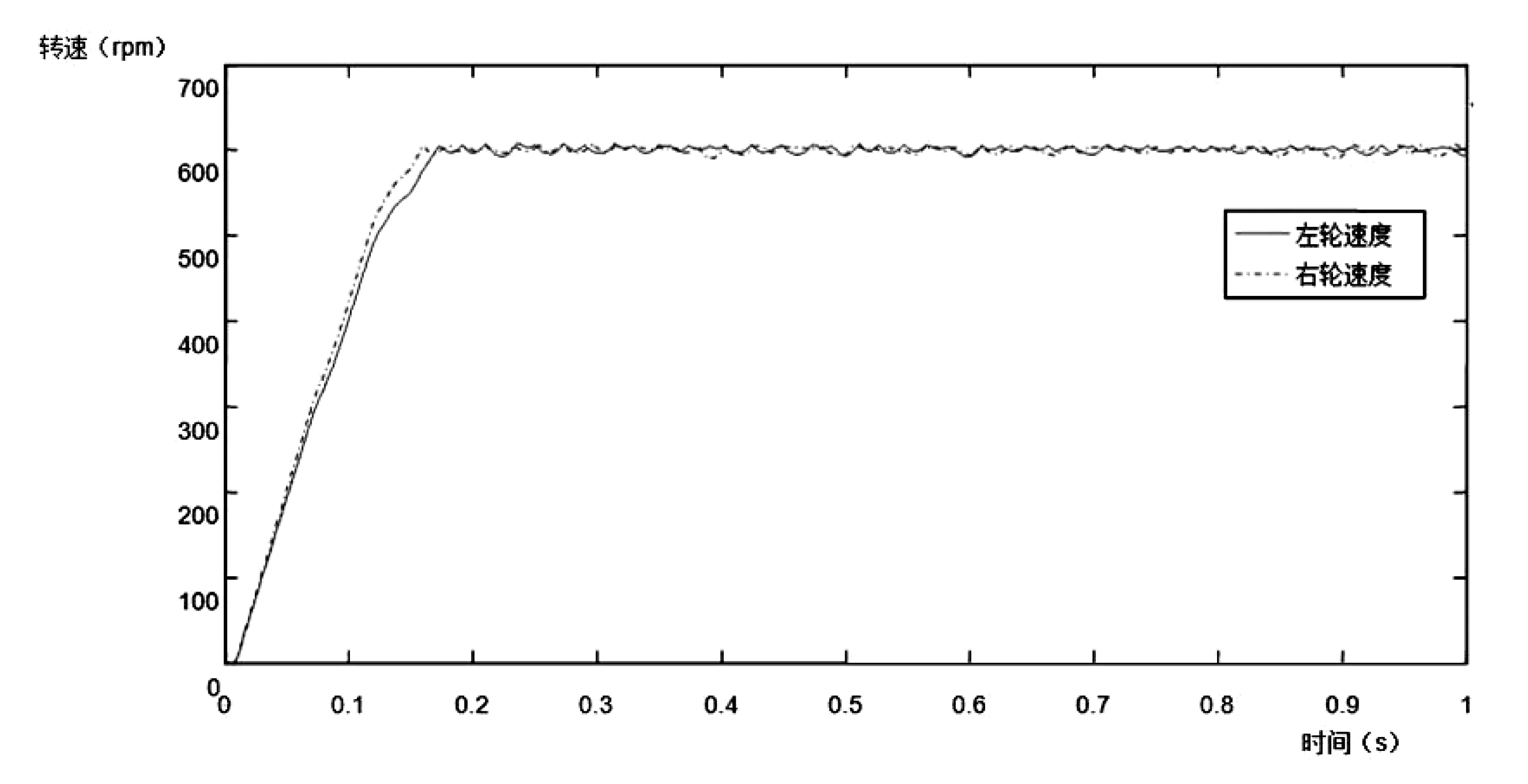
图12 速度仿真图
由图12可知,机器人在运动过程中,左右轮速度基本可以保持同步。
4 试验及分析
为验证前述分析的正确性,制作了实物样机并在实验室楼梯间进行相关测试。测试过程中,通过传感器采集数据信息得到机器人的工作状态,根据机器人的偏航角度和偏移位置实时调节电机速度,最终实现了机器人的攀爬动作。试验中选用的楼梯,每阶宽30cm,高15cm,表1为爬楼梯试验结果。

表1 爬楼梯试验结果
由试验结果可知,当机器人以不同的速度攀爬不同的台阶数时,都会存在一定的误差;当速度增大时,误差会出现增大的趋势,但平均测量误差均保持在3cm内,运行十分平稳。
5 结论
(1)本文设计的履带式变形机器人具备较高的攀爬楼梯的能力,通过搭建的硬件平台验证了机器人具备较强的越障性能。
(2)本文设计的PI调节器能够很好地保证两侧电机运转的同步性,MATLAB仿真结果表明,两侧电机的响应曲线几乎重合。
(3)在实验室楼梯间进行了机器人攀爬楼梯测试,试验测试数据误差较小,证明系统具有较高的稳定性。
猜你喜欢
数学小灵通·3-4年级(2021年5期)2021-07-16
学生天地(2020年3期)2020-08-25
汽车维修技师(2019年7期)2020-01-16
汽车观察(2018年9期)2018-10-23
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
小天使·一年级语数英综合(2016年4期)2016-11-19
诗选刊(2015年4期)2015-10-26
读者·校园版(2015年16期)2015-05-14
新高考·高一物理(2014年4期)2014-09-17