基于改进型模糊线性自抗扰控制器的SCR脱硝系统优化控制
2021-09-24 05:23牛玉广潘翔峰曹国庆庄志宝
动力工程学报 2021年9期
杜 鸣, 牛玉广, 潘翔峰, 曹国庆, 马 强, 庄志宝
(1.华北电力大学 新能源电力系统国家重点实验室,北京 102206;2.吉林电力股份有限公司白城发电公司,吉林白城 137000)
选择性催化还原(SCR)技术是我国火力发电厂最常用的烟气脱硝技术之一[1]。由于SCR脱硝系统具有大迟延、大惯性、多干扰、时变性和非线性等特点,采用比例-积分-微分(PID)控制器难以获得理想的控制效果,因此需要针对SCR脱硝系统设计更加精确的控制系统[2]。
国内外学者针对SCR脱硝系统提出了很多优化控制策略,其中预测控制技术是一种重要的优化控制方式。刘吉臻等[3-4]利用多变量预测控制技术进行优化控制研究。俞基安等[5]基于阶梯式广义预测控制算法构建了SCR脱硝系统的优化控制策略。侯鹏飞等[6]提出了一种适用于变工况的多模切换动态矩阵控制(DMC)与PID相结合的串级预测控制方法(DMC-PID方法)。王瑾等[7]利用粒子群算法根据出口NOx质量浓度设定值对喷氨阀门开度设定值进行了优化,进而完成了SCR脱硝系统的优化控制。周洪煜等[8]提出了基于混结构-径向基函数(RBF)神经网络(MS-RBFNN)的喷氨量最优控制方法。牛玉广等[9-10]利用单神经元自适应-人工鱼群滚动寻优控制算法(RSNAAFS)对喷氨量进行了优化控制,并提出了一种SCR脱硝系统分区控制方案。针对SCR脱硝系统的控制问题,上述研究中所提算法均较为复杂,对模型精确性要求较高,且现场扰动源较多,因此难以直接应用在电厂组态中。
自抗扰控制(ADRC)技术将系统未建模动态和未知干扰作为总扰动,通过扩张状态观测器进行估计并在反馈控制中进行消除[11]。ADRC不依赖系统模型,鲁棒性强,适用于复杂的现场控制环境。Gao[12]对非线性ADRC进行了线性化,得到了线性自抗扰控制器(LADRC),并提出带宽概念整定控制器参数。黄宇等[13]将LADRC应用到SCR脱硝系统的外回路控制中,并给出了控制器参数整定方法。姜家国等[14]利用Smith预估器对ADRC进行了改进。李健等[15]对基于迟延部分补偿的改进型LADRC在SCR脱硝系统中的应用进行了理论研究。Wu等[16-17]提出了一种利用高阶惯性环节代替纯迟延补偿的改进型LADRC,并将该控制器应用到循环流化床锅炉的控制中,证明了该类控制器具有相比于LADRC、比例积分(PI)等控制器的优越性。
笔者在现有研究的基础上,首次提出一种改进型模糊线性自抗扰控制器(Fuzzy-MLADRC),并将其应用至SCR脱硝系统的优化控制中。
1 SCR脱硝系统
SCR脱硝系统的一般工作原理如下:利用催化剂使加入的还原剂与烟气中的NOx反应,将NOx还原成N2和H2O,还原剂一般采用氨气。SCR脱硝控制系统中涉及的主要化学反应为:
(1)
通常催化剂的工作温度在320 ℃以上,但随着灵活性改造的进行,在机组降负荷过程中烟气温度降低,当催化剂低于正常工作温度时面临失效的困境。因此,有必要通过相应的改造或使用低温催化剂来提升SCR脱硝系统在低负荷下的安全性。在上述反应过程中,如果喷氨量较小,则还原剂无法与NOx充分反应;如果喷氨量过大,则还原剂会与烟气中的SO2反应,产生的硫酸盐会降低催化剂的脱硝效率和使用寿命,同时会增加运行成本,还会堵塞空气预热器,进而降低锅炉效率。因此,SCR脱硝系统在运行过程中有2个重要的控制目标:控制SCR脱硝系统出口NOx质量浓度达到排放要求;控制氨逃逸率,避免过量喷氨。
典型的SCR脱硝系统串级控制系统结构见图1,其中ρr为出口NOx质量浓度设定值,ρy为出口NOx质量浓度的测量值,d为内外扰动量,GNH3(s)为喷氨量的传递函数,GSCR(s)为烟气脱硝系统出口NOx质量浓度的传递函数,GSCR(s)=K2e-τ2s(1+T2s)-2,s为拉普拉斯算子,K2、T2和τ2分别为该传递函数的比例常数、时间常数和迟延时间。内回路的控制器通常采用PID控制器Gc2(s),而外回路控制器Gc1(s)是本文的研究重点。
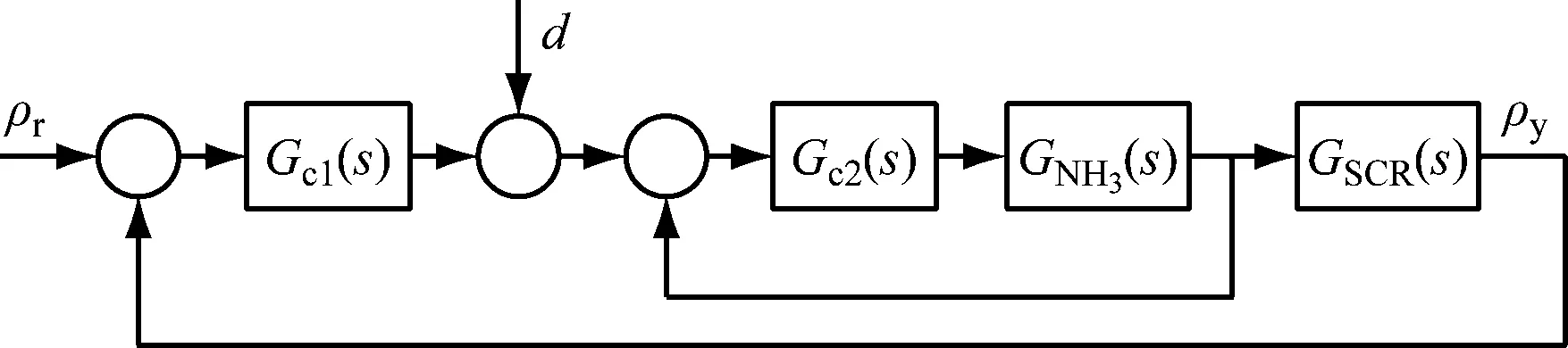
图1 SCR脱硝系统串级控制系统结构Fig.1 Cascade control structure of SCR denitrification system
2 Fuzzy-MLADRC
2.1 2种改进型自抗扰控制器
被控对象通常可以表示为:
(2)
式中:x(t)为状态变量;x(n)(t)为状态变量的n阶导数;u(t)为输入变量;w(t)为扰动变量;y(t)为输出变量;b0为系统增益;g()为系统广义扰动。
将g()扩展为一个新的状态变量,并同时令x1(t)=y(t),x2(t)=y(1)(t),…,xn(t)=y(n-1)(t),xn+1(t)=g(t)。
则系统可进一步表示为:
(3)
其中,

因此,设计的线性扩张状态观测器(LESO)为:
(4)
式中:z(t)为观测器输出估计值矩阵;L0为观测器增益矩阵;uf=u(t)/(Ts+1)n,其中T为补偿环节的惯性时间常数,n为补偿环节的阶次。
基于LESO对系统状态和扰动的估计,系统控制率(即对象的输入变量)可设计为:

(5)
式中:zn+1(t)为广义误差的估计值。
线性状态误差反馈控制率(LSEF)u0(t)为:
u0(t)=k1[r(t)-z1(t)]+k2[r(1)(t)-
z2(t)]+…+kn[r(n-1)(t)-zn(t)]
(6)

进一步推导可得:
u(t)={k1[r(t)-z1(t)]+k2[r(1)(t)-z2(t)]+…+
kn[r(n-1)(t)-zn(t)]-zn+1(t)}/b0=
(7)
式中:Ko为状态反馈增益矩阵。
针对大迟延对象,Zhao等[18]提出了一种改进型自抗扰控制器DLADRC,改进位置见图2。首先,对被控对象的迟延时间进行估计,然后将改进环节Gc(s)设置成对迟延时间的补偿。
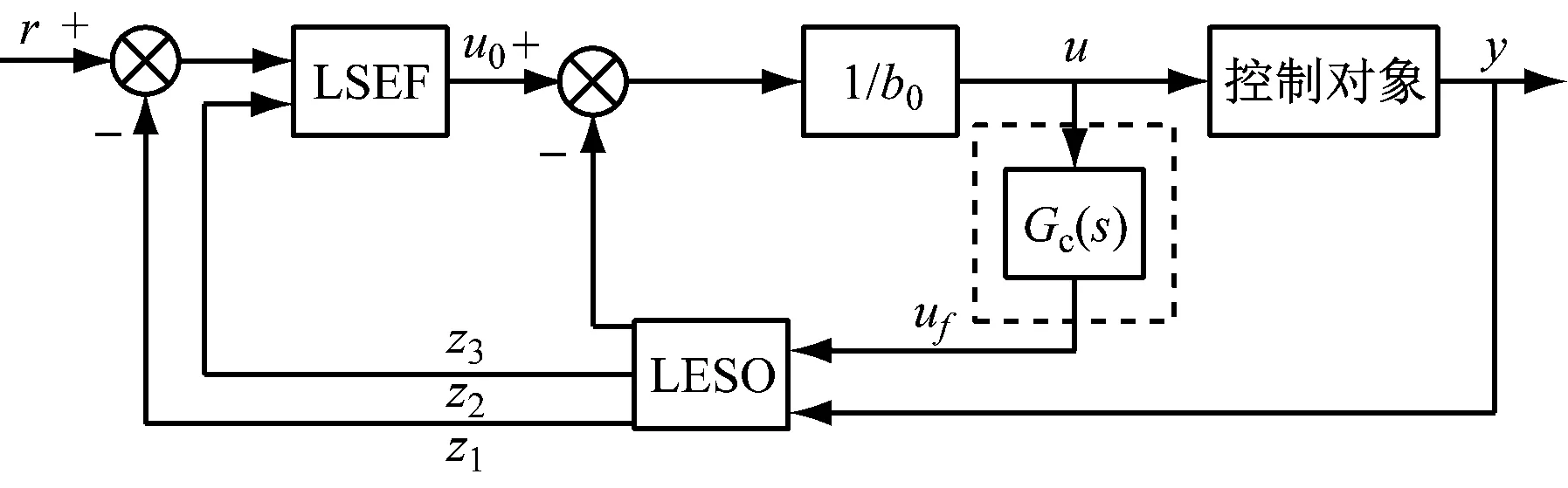
图2 改进型自抗扰控制器的结构示意图Fig.2 Structure diagram of improved ADRC
Gc(s)=e-τs
(8)
式中:τ为迟延时间的估计值。
Wu等[16-17]针对高阶惯性环节提出了另一种改进型的自抗扰控制器MLADRC,该改进之处在于将Gc(s)设置成惯性环节,在扩张状态观测器(ESO)中提前对被控对象的大惯性进行补偿。
(9)
结合带宽概念[17],以上控制器需要整定的参数包括b0、控制器带宽ωc、观测器带宽ωo、补偿环节的惯性时间常数T和补偿环节的阶次n。
以上2种控制器均是利用被控对象的部分信息,在扩张状态观测器中对被控对象的迟延时间进行补偿,其中DLADRC需要对被控对象的迟延时间进行较精准的估计,而MLADRC对模型的精确度要求相对较低,因此笔者基于MLADRC并引入参数模糊法则,提出Fuzzy-MLADRC。
2.2 Fuzzy-MLADRC
如图3所示,首先引入参数模糊化环节,选取b0、ωc和ωo3个参数的修正量Δb0、Δωc和Δωo作为模糊控制器的输出,基于Fuzzy-MLADRC的SCR脱硝系统示意图见图4,其中Δy=r(t)-y(t)。
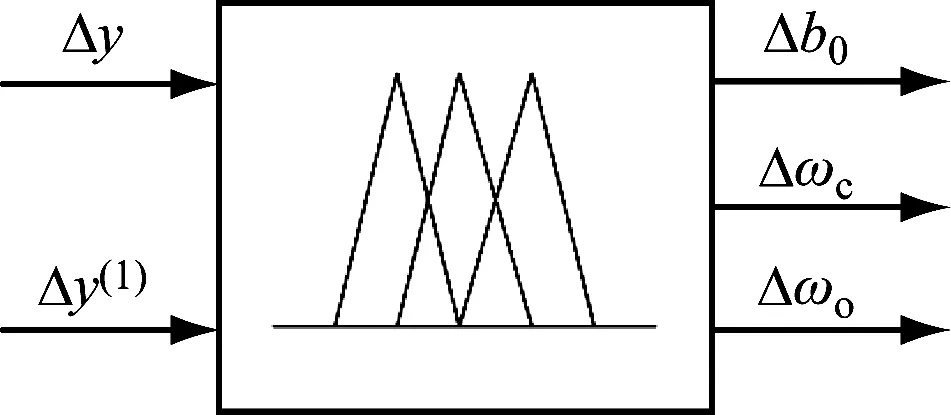
图3 参数模糊化过程Fig.3 Fuzzification process of parameters
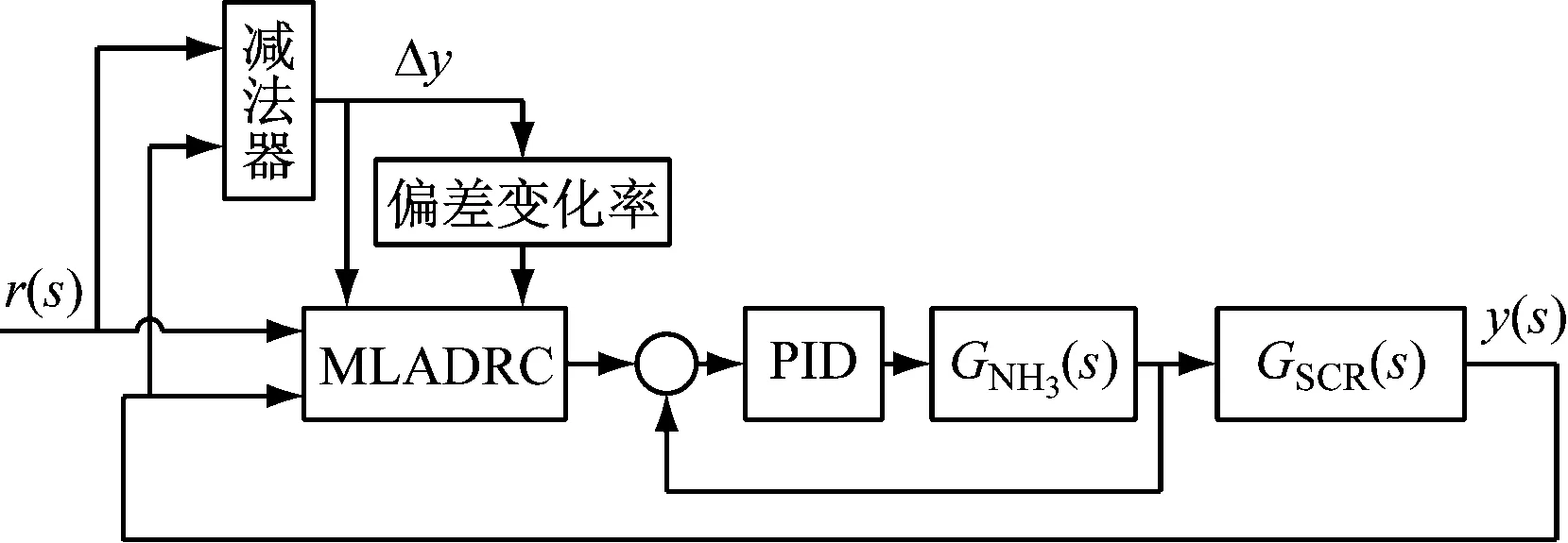
图4 基于Fuzzy-MLADRC的SCR脱硝系统Fig.4 SCR denitrification control system based on Fuzzy-MLADRC
通过式(10)对Fuzzy-MLADRC的参数进行补充。
(10)
式中:b00、ωc0和ωo0均为控制器初始参数。
Fuzzy-MLADRC的输入和输出均采用7个语言变量,相应的语言变量模糊集包括NB、NM、NS、ZO、PS、PM和PB,分别代表负大、负中、负小、零、正小、正中和正大,各语言变量均采用具有较高灵敏度的三角形隶属函数。
b0和ωc决定控制器的控制能力,ωc越大或b0越小,系统响应越快,但会出现超调现象,且振荡加剧。ωo越大,扩张状态观测器对状态误差的控制能力越强,系统的响应能力越强,但对噪声的观测能力也增强,系统输出发生振荡。根据各参数的调节规律,制定各参数模糊整定规则表,见表1~表3。其中,E为输入变量偏差,Ec为偏差变化率。
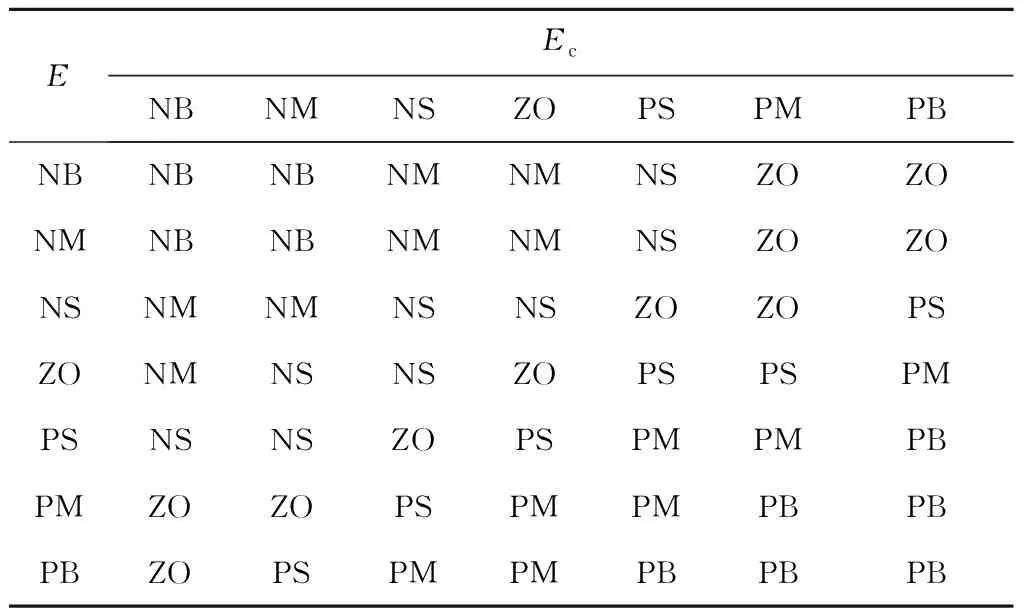
表1 b0的模糊整定规则
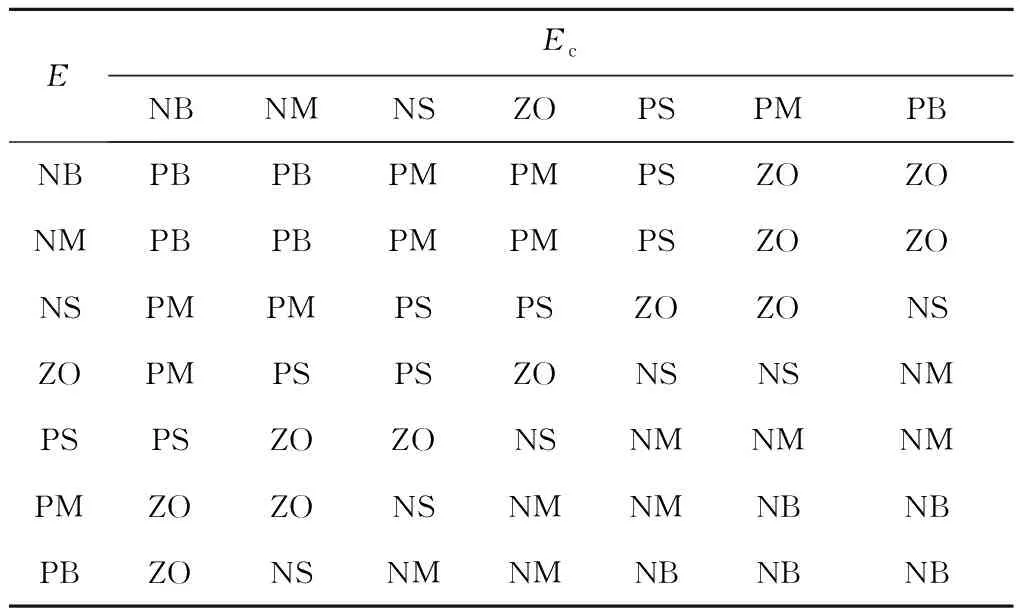
表2 ωc的模糊整定规则
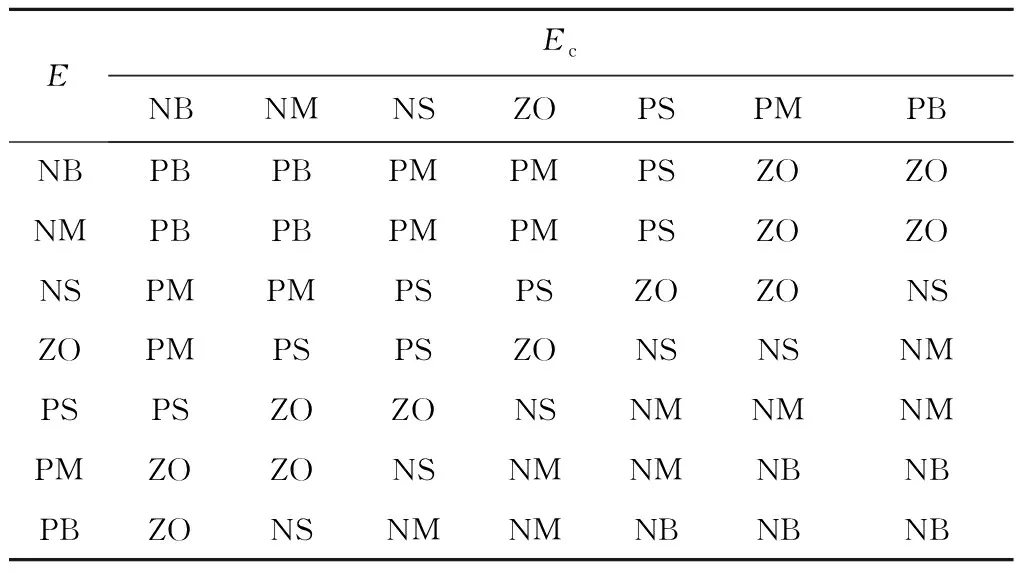
表3 ωo的模糊整定规则
2.3 控制器参数求解方法
由于SCR脱硝系统对象是一个大迟延、大惯性、时变的环节,难以直接确定T和n,因此将其视作待定系数,但从SCR脱硝系统模型中可以对T和n的取值范围进行界定。
采用带有交叉因子的粒子群算法对控制器参数进行寻优,优化目标函数f为:

(11)
3 仿真验证
在80%的机组负荷率下某电厂SCR脱硝系统的控制模型参数见表4。内环采用比例控制方式,比例系数取0.15,外回路分别采用PID、Fuzzy-PI、LADRC、DLADRC、MLADRC和Fuzzy-MLADRC进行仿真研究,自抗扰控制选用二阶LADRC,前4种控制器参数见表5,而Fuzzy-MLADRC的控制器参数在文中已给出,不再赘述。其中,KP为比例系数,Ki为积分系数,Kd为微分系数。

表4 控制模型参数
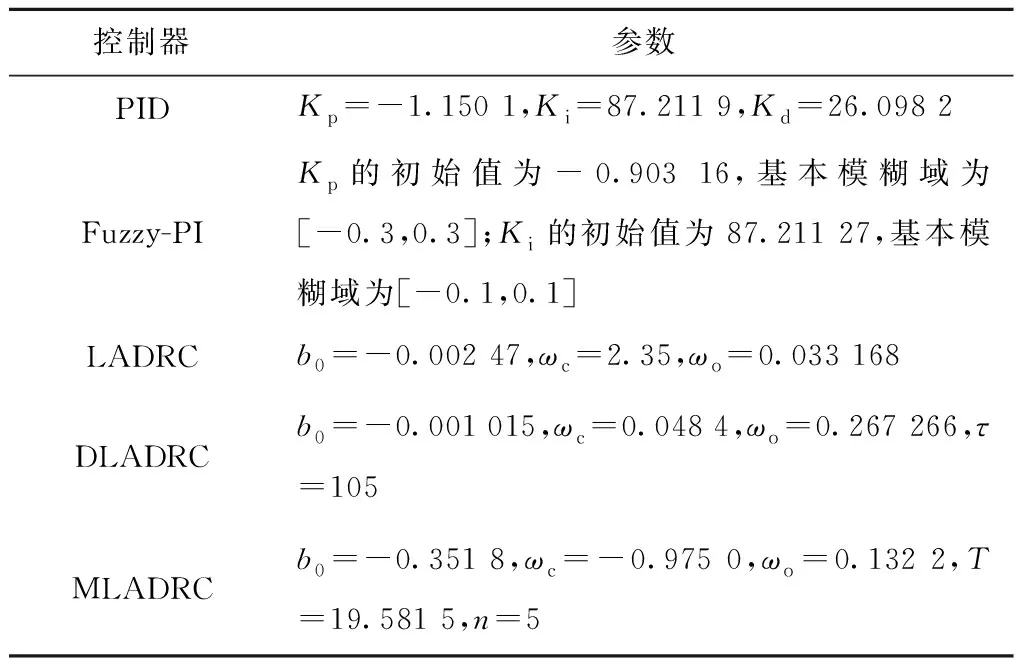
表5 控制器参数
PID控制器结构采用如下形式:Kp×[1+1/(Kis)+sKd]。初始参数b00、ωc0和ωo0采用MLADRC控制参数,选定E的基本模糊论域为[-2,2],Ec的基本模糊论域为[-3,3],Δb0的基本模糊论域为[-0.1,0.3],Δωc的基本模糊论域为[-0.1,0.2],Δωo的基本模糊论域为[-0.1,0.2]。经粒子群算法寻优,得到Δb0的比例因子为-0.094 2,Δωc的比例因子为1.482 0,Δωo的比例因子为-0.111 1。
3.1 控制效果评估
各控制器的设定值追踪效果和抗扰动能力仿真结果见图5和图6。各控制器的性能评估结果见表6。当采用PID和Fuzzy-PI控制器时,最优指标f分别为165.71和196.62,而LADRC的最优指标为158.29,其他控制器的最优指标更低,因此相较于PID控制器,自抗扰控制器普遍能取得更优的设定值追踪效果。采用Fuzzy-MLADRC控制器时,控制系统的输出能快速跟踪输入指令,并快速稳定到设定值,其上升时间最短(43.28 s),设定值追踪效果最优。从图6可以看出,DLADRC的抗扰动能力最强,受到扰动后能快速回到设定值附近,其次分别是MLADRC和Fuzzy-MLADRC。
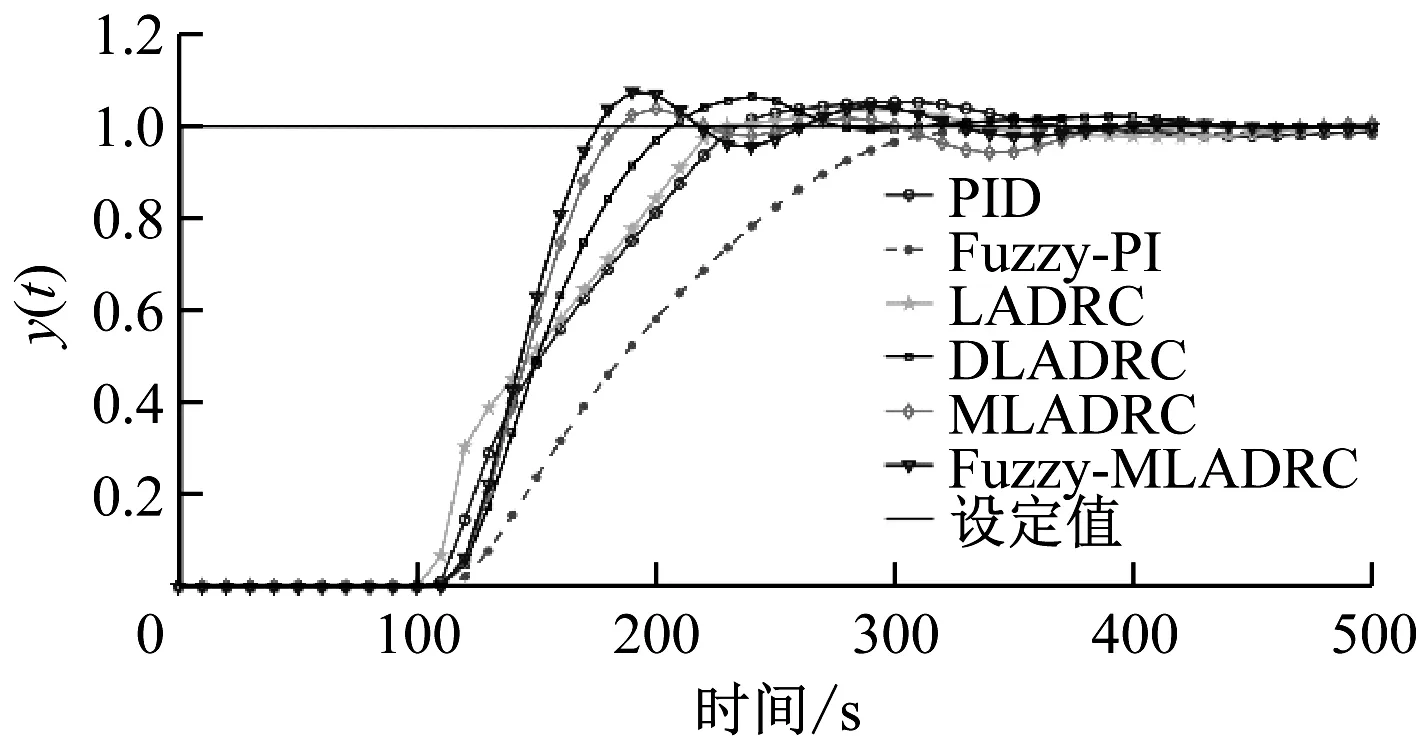
图5 设定值追踪效果Fig.5 Simulation results of set point tracking effect

图6 抗扰动能力仿真结果Fig.6 Simulation results of anti-disturbance ability
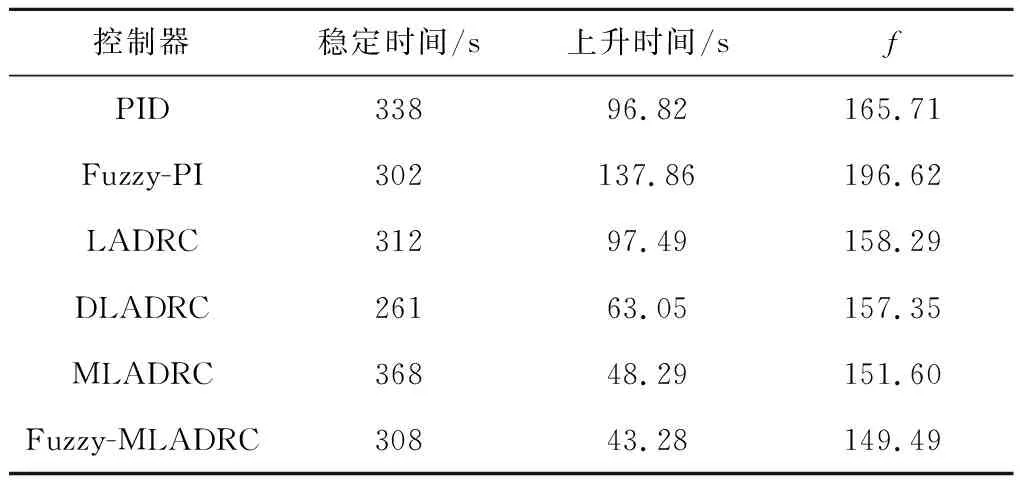
表6 控制器性能评估结果Tab.6 Performance evaluation results of controllers
3.2 控制器的鲁棒性分析
在不同负荷下SCR脱硝系统模型的差异较大,且干扰源复杂,在不同条件下时间常数和迟延时间等变化较大。因此,为检验不同控制器的鲁棒性能,假设扰动引起的SCR脱硝系统模型变化部分全部叠加到外环上。假设模型参数有以下变化:K2=-3.2×(0.8+0.4×ξ1),T2=25×(0.8+0.4×ξ2),τ2=105×(0.8+0.4×ξ3),其中ξ1、ξ2和ξ3∈N(0,1)。在此基础上进行50次蒙特卡洛模拟,结果见图7和表7。

图7 鲁棒性测试结果Fig.7 Results of robustness tests
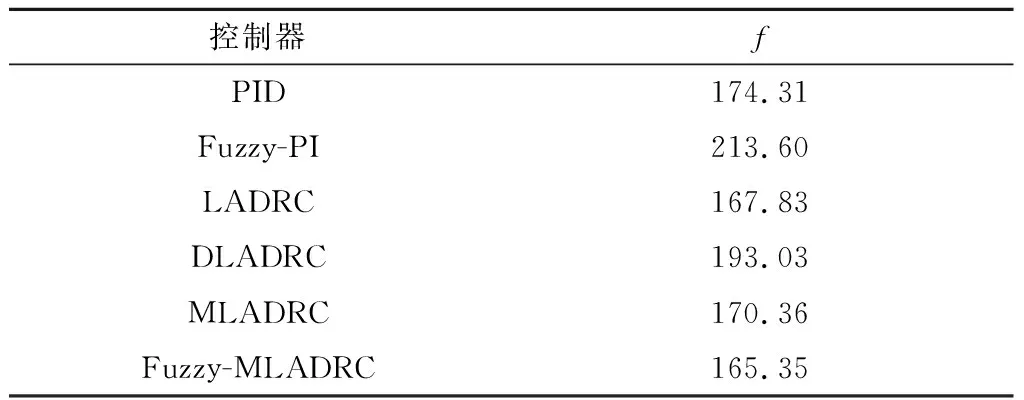
表7 控制器鲁棒性评估结果Tab.7 Evaluation results of robustness for controllers
从图7和表7可以看出,LADRC和PID均具有相对稳定的控制效果,在每次模拟中最优指标f均保持在相似位置,而DLADRC与MLADRC在模型失配的情况下均出现不同程度控制效果下降的情况,原因在于这2种控制器均对模型精确度有一定要求,特别是对象迟延时间的精确度。当迟延时间失配程度较高时,采用DLADRC时系统会出现发散的情况。随着模型失配的加剧,MLADRC也会出现控制效果变差的情况,但最优指标增幅较小,因此该控制器的鲁棒性比DLADRC更强。与其他控制器相比,Fuzzy-MLADRC的最优指标增幅最小,表明在模型参数失配的情况下该控制器的鲁棒性最好。
4 结 论
(1) 在参数最优化的前提下,自抗扰控制器在该系统中的控制效果优于PID控制器。
(2) DLADRC对模型精确度要求较高,在迟延时间偏差较大的情况下,该控制器的控制效果下降较快,甚至出现不稳定的情况。相比之下,MLADRC对迟延时间的依赖程度较小。
(3) 由于Fuzzy-MLADRC的响应速度较快,最优指标最小,因此其设定值跟踪效果最优。
(4) 在模型失配的情况下,相比于DLADRC和MLADRC,Fuzzy-MLADRC仍能保持较优的控制性能,其鲁棒性较好。
猜你喜欢
湖北农机化(2021年7期)2021-12-07
农业机械学报(2020年2期)2020-03-09
法大研究生(2020年2期)2020-01-19
大经贸(2019年10期)2019-12-09
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
华东政法大学学报(2015年4期)2015-12-24
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17