基于图像的空中加油软管平衡拖曳位置测量方法
2021-09-23 08:53:28张建花马晓东
应用光学 2021年4期
张建花,陈 贝,马晓东
(中国飞行试验研究院 测试所,陕西 西安 710089)
引言
“插头-锥管”式空中加油系统是目前众多国家采用的一种空中加油方式。加油锥套对大气紊流较敏感,当受油机和加油机逼近时,两机流场相互影响,加油锥套摆动幅度增大,加油对接困难。因此,计算空中加油软管的平衡拖曳位置是研究“插头-锥管”式加油软管锥套组件动态运动的基础和重要依据[1-3]。常规模式是建立加油机尾流场模型,从软管受力分析出发,通过离散软管质点分析计算空中加油软管平衡拖曳位置[4]。本文设计了一套基于视觉图像的空中加油软管平衡拖曳位置测量方法,避免利用力学和流场分析加油软管平衡拖曳位置的复杂建模和公式推导,解决了飞行条件下加油系统关键参数测试与性能评估的技术难题。
1 测量方案设计
1.1 系统构成
在加油机上加装高清摄像机、高清视频采集记录器、电源变换器、GPS 时码发生器,构成空中加油机载多路高清影像测量系统,该系统如图1 所示。其中,电源变换器将飞机上的28 V 供电转换为12 V,为高清摄像机供电;GPS 时码发生器为系统提供精确到ms 的IRIG-B 时间信息;高清视频采集记录器控制高清像机的同步触发和图像采集记录。
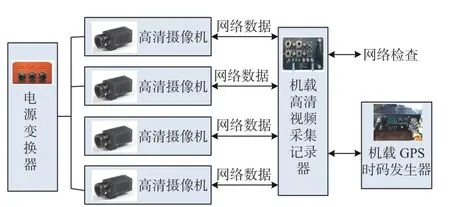
图1 空中加油机载多路高清影像测量系统Fig.1 Airborne multichannel and high-definition image measurement system of aerial refueling
1.2 测量原理
利用空中加油机载多路高清影像测量系统获取空中加油对接过程中加油软管的高清影像。对两路高清影像中的加油锥套识别和跟踪,获取同一时刻锥套中心在每一帧图像中的像素坐标[5]。根据像机标定参数以及摄影测量前方交会原理,构建数学计算模型,计算加油软管随时间变换的运动轨迹,然后分析得出飞行条件下加油软管平衡拖曳位置。
2 关键技术
2.1 多像机同步采集技术
为避免各像机内部时钟不同步引起的测量误差,在空中加油机载多路高清影像测量系统研制中,将飞机上加装的GPS 时码发生器秒脉冲作为时间基准。高清视频采集记录器接收IRIG-B 时间码,根据像机所设置的拍摄频率n,当整秒脉冲信号到来时,发送1 s 的频率为nHz 的方波信号,由方波信号触发像机进行外同步拍摄,使各台像机能在相同的时刻开始拍摄,并在相同的时刻停止拍摄。同步信号产生的同时,采集器记录同步信号对应的时间数据,当像机的影像数据传输到采集器后,与此时间数据合并成带有时间标志的影像帧数据,从而实现了每一帧画面都具有系统时标。
2.2 基于直线射影约束的机载像机标定技术
软管运动范围为加油吊舱尾部向后25 m、向下5 m、左右各偏5 m,视场景深较大。在机库作业环境下,像机标定困难。若仅依靠少量的控制点采用常规空间后方交会法进行标定,会导致标定精度差或无法收敛[6-8]。本文提出基于直线射影约束的像机标定方法,设计以光条图案、外部直线结构为特征的现场标定方案,将像机标定参数中的线性参数(x0,y0,fx,fy,φ,ω,κ,Xs,Ys,Zs)和非线性的畸变系数ki(i=0,1,2,3,4)区分求解[9],线性参数用点元素解算,非线性参数用线元素解算,解决了像机标校的难题。
1)利用点求取像机标校的线性参数
根据计算机视觉原理,任意一个像点(x,y)和对应(X,Y,Z)的物方点[10]满足的中心透视投影关系通过投影矩阵写成:

像机投影矩阵M矩阵与像机内外参数的关系为
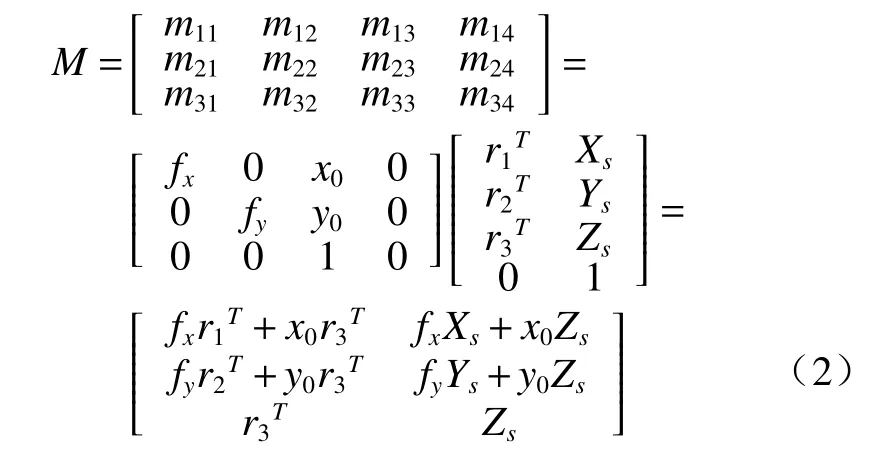
像机姿态角可采用以下公式:

此时,就得到了像机的全部线性参数(x0,y0,fx,fy,φ,ω,κ,Xs,Ys,Zs)。
2)利用直线求取像机标校的畸变参数
像机标校时总能在视场内找到一些具有直线特征的参照物,如机库的门窗、工作梯等。由于镜头畸变系数的存在,直线的像并不一定是直线。因此,用于标定的像直线是通过对直线的像进行线性拟合逼近得到的。依据上一步计算得出的像机线性参数,根据直线的像的曲线方程参数和像直线的直线方程参数计算得到畸变系数[11]。
畸变后像点与理想像点之间的关系:

又因为:

将(4)式、(5)式带入直线的像的曲线方程,可得:

式中,ρi(i=0,1,2)为曲线方程参数,且有:

由此,在得到像机内参数、像直线方程参数以及直线的像的曲线方程参数后,就可以通过对方程线性求解得到畸变系数ki(i=0,1,2,3,4)。
2.3 基于归一化互相关系数法加油锥套识别与跟踪技术
在加油锥套正面、背面无法喷涂测量标志点,采用归一化互相关系数法(normalized cross correlation,NCC)[12],利用统计相关原理来进行影像匹配。通过在2 幅影像中分别定义目标窗口和搜索窗口,根据窗口内像元的灰度值计算互相关系数,互相关系数取得最大值的地方就是最佳的匹配位置。NCC法对影像之间色调上的差异有一定的鲁棒性,可以有效地应对辐射差异。该方法基于图像的相关原理,涉及到的主要公式如下:
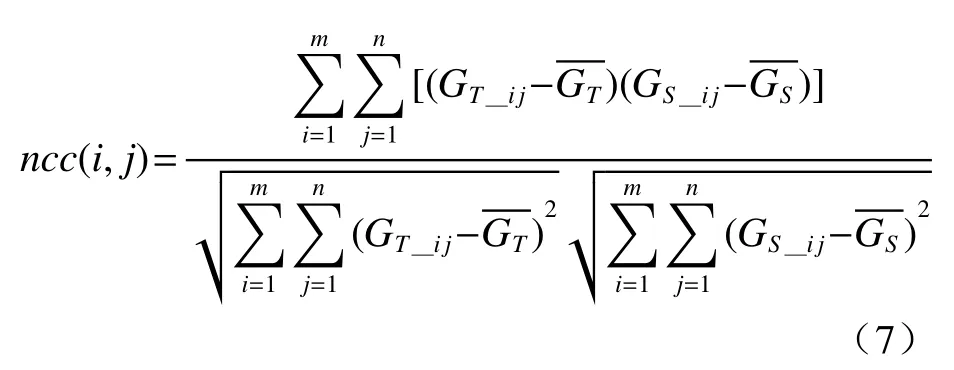
式中:GT—ij与为参考影像像元和所有像元的灰度均值;GS—ij与为待匹配影像窗口的像元和所有像元的灰度均值。通过获取初始点ncc(i,j)的相关参数值,并在下一帧设置范围内进行所有点的相关参数值计算,获得ncc(i,j)参数值矩阵,当某一点的相关参数值与初始值差值小于阈值时,定义该点为该帧的跟踪判读点,完成无参考点锥套跟踪判读。
2.4 解算模型构建
以加油吊舱尾部软管出口为坐标原点O,X轴指向飞机的右侧,Y轴指向上方,Z轴垂直YX平面构成右手坐标系。假设,A为加油锥套上的中心点;则a1、a2 为A分别在2 台高清像机拍摄影像上的同名像点;S1、S2 为2 台高清像机的摄影中心;(x1,y1)和(x2,y2)分别为a1、a2 的像素坐标;x1-y1-z1 和x2-y2-z2 分别为高清像机1 和高清像机2 的摄像空间坐标系。如图2所示。

图2 空中加油软管平衡拖曳位置测量示意图Fig.2 Schematic diagram of measuring balance towing position of aerial refueling hose
由于像机中心S[13]、像点及物方点位于一条直线上,构建计算解算模型:

式中:(x,y)是加油锥套中心点的像素坐标;(x0,y0,fx,fy,φ,ω,κ,Xs,Ys,Zs)是像机参数的标定结果;(ai,bi,ci,i=1,2,3)是由像机外方位元素而构成的旋转矩阵;(X,Y,Z)是待求量[14]加油锥套的三维轨迹。
镜头畸变模型为

将上式整理成以下线性方程式:
2 个影像上的1 个同名点可以列出4 个线性方程,通过最小二乘得到加油锥套的运动轨迹(X,Y,Z)。由此,逐帧解算获取空中加油过程中加油锥套每个时刻的运动位置,进而得出加油软管平衡条件下的拖曳位置。
3 试验及精度分析
图2 中S1、S2 为左右像机。假设 ϕ1、ϕ2分别为左右相片的偏角,B为交会摄影基线,A为交会测量点,∠S1AS2为交会角,l为像机靶面到物方点之间的距离。根据该测量模型,加油锥套的运动轨迹中误差数学表达式[15]如下:
假设物距l=25 m,镜头焦距f=24 mm,其中相片偏角ϕ=10°(mx,my),取标志点判读精度为1 个像素,约7.4 μm,根据(10)式计算得:

因此空间定位测量总误差估计为

对空中加油软管运动进行模拟试验,用MATLAB编写数据处理软件,获得加油软管的时间-轨迹历程曲线如图3所示。根据实际工程经验,考虑人为观察误差、处理误差等因素,软管平衡拖曳位置测量解算误差基本可以控制在5 cm 以内。

图3 软管运动时间历程曲线Fig.3 Time history curve of hose movement
4 结束语
本文提出了一套基于图像的“插头-锥管”式空中加油软管平衡拖曳位置测量方法,该方法直观、计算简便,不仅可以获得高精度的测量数据,还可以获取高分辨率的影像信息。经过实际飞行验证,该方法可行,测量结果精度满足要求,为研究空中加油软管锥套运动模型和确定加油机与受油机加油对接位置提供依据,为完善空中加油试飞程序、优化加油控制参数、修订飞行手册和空中加油的国军标提供了重要的试验数据。
猜你喜欢
河北农机(2021年12期)2022-01-06 01:21:42
水泵技术(2021年6期)2021-02-16 01:14:42
科学技术与工程(2020年4期)2020-04-08 08:19:34
地理教育·当代幼教(2020年1期)2020-02-16 14:45:42
现代农业(2016年5期)2016-02-28 18:42:34
飞行力学(2015年3期)2015-12-28 08:38:18
橡胶工业(2015年8期)2015-07-29 09:22:50
航空世界(2014年7期)2014-09-24 19:29:08
飞行力学(2014年4期)2014-09-15 07:49:32
电子设计工程(2014年18期)2014-02-27 12:00:19