
配电线路绝缘包裹机器人机械本体结构研究
2021-09-23 10:52:48夏文超鲁彩江高宏力
机械设计与制造 2021年9期
夏文超,鲁彩江,高宏力,王 雨
(1.西南交通大学机械工程学院,四川 成都610031;2.西南交通大学先进驱动节能技术教育部工程研究中心,四川 成都610031)
1 引言
目前城乡结合部和农村配电架空输电线路70%以上还是裸导线,每当刮风下雨树障致使配电线路频繁跳闸,尤其是临近房屋、树木、鱼塘等区域,更是配网跳闸和人员触电死亡的重灾区,严重影响了供电效益,产生了不良的影响。面对此类问题,传统解决办法是在停电的情况下,人工悬挂在高压线路上对裸露导线进行包裹[1-4]。如图1所示,a是用于绝缘包裹的绝缘皮;b是传统的人工包裹方法。从图中可以看出,人工安装绝缘皮存在安全隐患,工作效率低。

图1 输电线绝缘皮的外观及传统绝缘改造方法Fig.1 Appearance of Cable Insulation Cover and Traditional Insulation Modification Method
此次研究的目的在于设计与开发一款架空裸露导线绝缘包裹机器人,在架空裸露导线通电情况下实现自动包裹。国内外近两年开始着手于架空配电线路绝缘化改造项目的研究。2017年,华北电力大学研制了一款10kV架空线绝缘修复机器人,能对绝缘导线破损处实施包裹新的绝缘皮、完成线路修复。但机器不能完成对裸露导线的绝缘改造工作[5];2018年2月,新加坡施普林格天然气私人有限公司开发了一款高压输电绝缘机器人,通过橡胶轮驱动圆盘旋转将电工胶布包裹在导线上[6]。该机器结构简单,但用电工胶布包裹的方法可靠性差,需要人工上线安装并放置初始位置,不能带电操作。
为了解决架空裸露导线存在的问题,设计了一款架空裸露导线绝缘包裹机器人,机器人能对架空裸露导线有效包裹,实现自动化运行与带电操作。
2 机械系统设计
2.1 总体结构
绝缘包裹机器人结构图,如图2所示。

图2 绝缘包裹机器人总体结构Fig.2 Overall Structure of Cable Wrapping Robot
机器人主体为框架结构,机架上设有送料机构及用于机器人在导线上移动的行走机构;机架底面设有供线缆进入的开口;机架底层的横梁上固定安装升降机构,升降机构上安装有位于行走机构之间、用于将绝缘皮扣合在线缆上的扣合机构;邻近送料机构的行走机构前轮与扣合机构间的纵梁上安装有进料支撑机构[7]。
2.2 进料支撑与行走机构
进料支撑机构示意图,如图3所示,舵机通过联轴器与转轴连接,夹爪固连在转轴上,通过齿轮啮合实现两个夹爪反向转动,舵机能有效的控制夹爪张合角度。在机器人上线前,将绝缘皮放置在夹爪卡槽内,夹爪的卡槽能卡住绝缘皮起到支撑作用。上线前夹爪张开,导线由夹爪空隙进入;上线后通过舵机带动夹爪闭合使绝缘皮进入包裹准备状态。

图3 进料支撑机构Fig.3 Feeding Support Mechanism
机器人在线上的行走由行走机构驱动,如图4所示,两个行走轮各由一个无刷直流减速电机驱动,电机安装在纵梁上,电机输出轴与转轴孔通过紧固螺钉相连,转轴另一端安装在轴承上。行走机构结构简单紧凑、传动平稳、维护更换方便。行走轮采用V型轮式结构。V型轮能够适应一定范围内的不同线径,采用PVC材料并做表面粗糙处理以增大V型轮与线路之间的摩擦,在遇到线路爬坡情况下可以避免打滑现象[8-10]。
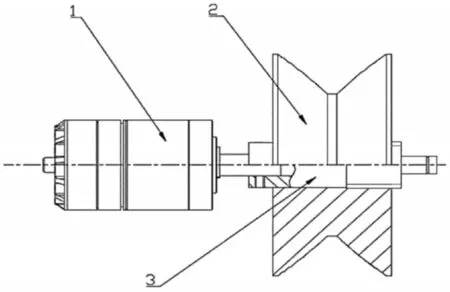
图4 行走机构示意图Fig.4 Schematic Diagram of Walking Mechanism
2.3 进料机构
绝缘层自然状态下是弯曲的,必须压平方便进料,轮子夹紧绝缘层依靠静摩擦力实现连续的送料。进料机构及工作时的截面示意图,如图5所示,电机输出的动力通过同步带传输到主动送料轮,主动送料轮与从动送料轮通过齿轮进行传动。从动送料轮设计成带挡边的圆柱体,挡边之间的距离等于绝缘层内圆周长,即等于绝缘层压平状态下两边的距离,从而绝缘层的左右位置被固定;主动轮的宽度等于绝缘层压平状态卡扣处突起间的距离,主动轮与从动轮的配合进一步消除了绝缘层的偏移的可能[11]。

图5 进料机构示意图Fig.5 Schematic Diagram of Feeding Mechanism
2.4 升降与扣合机构
升降机构由两个步进电机驱动,电机安装在机器的前后两端,扣合机构的中心位于两个步进电机中心位置,通过丝杠将电机的旋转运动转化为直线运动带动扣合机构升降。在机器人上线包裹之前,升降台处在底端,为机器人的上线留出空隙,当机器人被送上电线后抬升升降台使其与夹爪中的绝缘皮同高,使得绝缘皮能够进入其中实现包裹。
开口状态的绝缘皮通过扣合器机构后变为扣合状态,其上的夹紧轮左右两排对称分布且反向转动,各对夹紧轮从入口处至出口处间距一次依次减小,挤压绝缘皮扣合并辅助绝缘皮移动;传动采用同步带的方式,其传动平稳,有一定的缓冲和吸振能力,机构简单,维护方便[12]。夹紧轮凹槽与绝缘皮形状适配,保证夹紧过程绝缘皮不会从扣合器上脱落且能正确扣合。

图6 扣合机构及扣合原理示意图Fig.6 Fastening Mechanism and Principle Diagram of Fastening
2.5 爬坡分析
绝缘包裹机器人线上行走时,行走轮与导线并不直接接触,行走轮压在绝缘皮上,绝缘皮包裹了裸露导线。为了使机器人上、下坡时有足够的牵引力和制动力,在线上行走不打滑,行走轮和绝缘皮之间要有足够的摩擦。机器人的重力作用使得两个行走轮之间的导线近似一条直线。机器人设计最大爬坡角度为15°,机器人行走受力分析图,如图7所示。
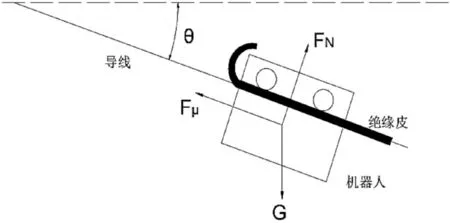
图7 机器人行走受力分析简图Fig.7 Robot Walking Force Analysis Diagram
由图7可知

整理得

当导线倾角θ=15°时,

由上述分析可知,绝缘皮与绝缘包裹机器人行走轮之间的动摩擦因数大于0.27时,机器人上、下坡时有足够的牵引力和制动力。
2.6 工作流程
绝缘包裹机器人的工作流程大体分为三个阶段:包裹准备阶段、包裹阶段、包裹结束阶段。准备阶段需要各个机构运动到初始位置,将绝缘皮经机架顶部的导向机构引入送料机构,经行走机构后卡入进料支撑机构内;工人使用绝缘支撑杆支撑包裹机器人完成机器人的上线、下线。包裹机器人详细工作流程图,如图8所示。

图8 机器人工作流程图Fig.8 Robot Flow
3 实验结果
经样机制作与现场试验,总结绝缘包裹机器人的主要技术指标,如表1所示。

表1 技术指标Tab.1 Technical Index
针对包裹机器人的包裹效率和爬坡能力,在模拟线路和实际线路上做了大量实验,实验结果表明,采用双轮驱动方式为机器人提供了足够的驱动力,行走轮与绝缘皮动摩擦系数为0.48大于0.27,最大爬坡角度超过设计要求最大角度15°;驱动轮采用V型结构能够适应不同的线径;绝缘皮能够与扣合机构适配实现为裸导线包裹的功能;各机构电机转速之间保持一定的线性关系实现机器人以5m/min的速度包裹;机器人整机的重心配在下方悬挂的填料盒中,有效避免了机器人在遇到大风情况下倾覆脱线的发生。
实验表明,机器人运行正常,具备较好的包裹能力。为机器人样机、验测试及实验结果图,如图9(a~d)所示。
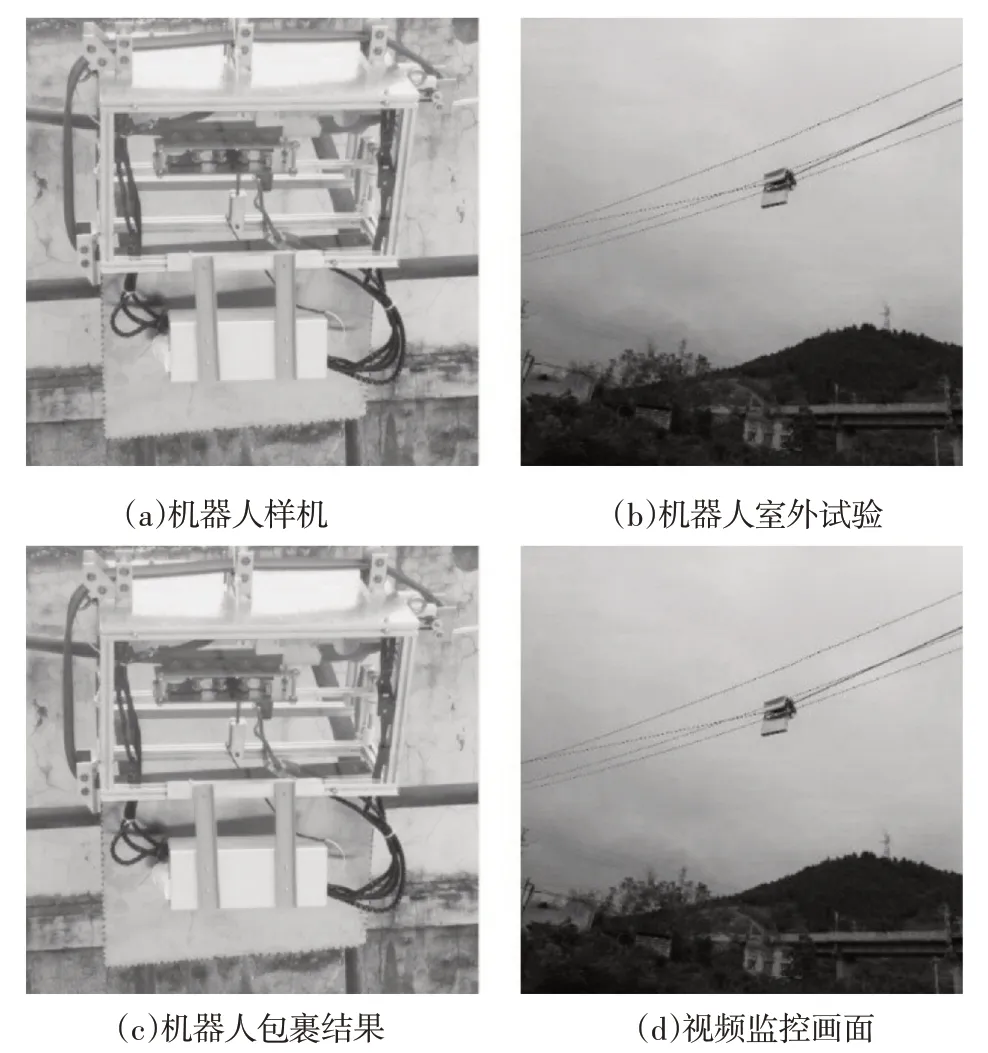
图9 机器人实物、实验测试及实验结果Fig.9 Real Robot、Experimental Test and Results
4 结论
本研究提出一款配电线路绝缘包裹机器人,用于覆盖裸露导线。该机器人结构简单、体积小、重量轻,与现有的电力机器人相比更具有应用价值。机器人具有以下功能:(1)实现包裹裸露导线;(2)包裹故障的绝缘导线,如熔化的电线和腐蚀。实验表明,所开发的机器人系统是一款有效的配电线路绝缘包裹装置。本文的主要贡献在于:(1)设计了一个用于架空配电线路绝缘包裹的轮式移动机器人;(2)提出了一种架空导线包裹的新思路;(3)开发了实验室规模的工作样机。
猜你喜欢
科学家(2022年3期)2022-04-11 23:55:49
云南化工(2021年6期)2021-12-21 07:31:18
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
森林工程(2018年3期)2018-06-26 03:41:04
电线电缆(2018年1期)2018-03-16 02:19:08
电线电缆(2017年4期)2017-07-25 07:49:49
橡塑技术与装备(2016年14期)2016-02-24 22:23:19
设备管理与维修(2015年12期)2015-04-09 06:57:18
