基于人工蜂群支持向量机的电动汽车制动意图识别方法
2021-09-16 02:37:04李向杰张向文
中国机械工程 2021年17期
李向杰 张向文,2
1.桂林电子科技大学电子工程与自动化学院,桂林,5410042.广西自动检测技术与仪器重点实验室(桂林电子科技大学),桂林,541004
0 引言
线控制动(brake-by-wire)系统作为一种新型的电动汽车制动系统,具有响应快、性能好、结构简单等特点[1],其制动踏板与制动器之间通过电子控制单元(electronic control unit,ECU)以电信号连接,能够根据驾驶员制动意图制定协调式再生制动控制策略,实时分配电机再生制动力和制动器制动力之间的比例,实现更强的制动性能、更高的能量回收效率和更好的制动感觉,从而提高电动汽车制动的安全性、经济性和舒适性[2]。但由于制动踏板与制动器之间解耦,因此如何根据制动踏板产生的电信号准确并快速识别驾驶员的制动意图是一个难点[3]。如果能够准确并快速识别制动意图,不仅可以保证协调式再生制动控制策略稳定运行,使车辆按照驾驶员的制动意愿进行减速,实现安全稳定制动,并增加能量回收比例和获得更好的制动感觉[4],而且能为防抱死刹车系统(ABS)、自动刹车系统(AEB)、车身电子稳定系统(ESP)等系统的稳定运行提供帮助[5],因此,对驾驶员的制动意图进行识别有着重要的研究价值与意义。
在早期的研究中,一般通过设置阈值来识别制动意图[6-7]。后来,伴随着电子制动系统的发展,对制动意图的识别不仅仅局限于紧急制动意图,为了实现多种制动意图的识别,结构简单、对非线性问题有一定优势的模糊推理方法得到了广泛应用。文献[8-10]采用制动踏板信号和车辆状态参数信号作为输入,通过设置隶属函数和制定模糊规则对制动意图进行识别,采用该方法可以较为准确地识别出是紧急制动还是中度制动抑或是轻度制动,从而指导再生制动控制策略或者换挡策略的建立。文献[11]在使用模糊推理方法识别制动意图的基础上讨论了制动踏板位移与制动意图及制动强度之间的关系。文献[12]在一般模糊推理方法的基础上,以制动踏板位移和位移变化率为输入设计制动意图的模糊推理规则,采用学习向量量化神经模糊系统,建立了制动意图识别模型。
有监督和无监督的机器学习方法凭借高效的非线性问题处理能力以及自适应能力,被用来识别制动意图,获得了较高的制动意图识别精度。文献[13]采用BP神经网络对制动意图进行了识别。文献[14]比较了神经网络和模糊推理两种制动意图识别方法,结果显示神经网络法具有更高的准确性。文献[15]将长短期记忆网络(LSTM)应用于识别制动意图,并与BP神经网络进行了对比,结果表明LSTM具有更高的识别精度。文献[16-17]提出了分层隐马尔可夫模型和自适应神经模糊推理系统(LHMM-ANFIS)耦合的制动意图识别模型,该模型被用于开发自动机械变速器(AMT)的变速控制策略,以提高制动安全性和能量回收效率。文献[18-20]提出了基于经验模态分解(EMD)和熵理论的电动汽车制动意图识别方法,对输入信号数据进行数据挖掘,提取有用特征后采用聚类算法进行制动意图识别,该方法有效提高了缓慢制动和中等制动的识别正确率。
通过设置阈值来识别制动意图虽然具有可行性,但是识别率低。模糊推理法结构简单,对非线性不确定系统控制有一定的优势,但其平均识别准确率在90%左右,紧急制动意图识别准确率在95%左右,缓慢和中等制动意图的识别准确率低于90%甚至低于80%[18]。机器学习的方法中,神经网络法具有良好的自学习、自适应性和非线性能力,但当样本数据偏少时,训练的模型性能往往不理想。隐马尔可夫法识别效果会因样本量的增加而变好,对紧急制动意图的识别精度高,但是对常规制动意图识别精度较低。基于熵理论的聚类法可有效提高缓慢制动和中等制动的识别准确率,但识别时间在0.2~0.4 s之间,识别速度较慢。
通过上述分析可以看出,目前的识别方法主要存在两个问题,即识别精度不高和实时性不强。为了解决这两个问题,本文设计了基于人工蜂群支持向量机(artificial bee colony-support vector mechine,ABC-SVM)算法的驾驶员制动意图在线识别方法,从特征选择和优化识别算法两个方面来增加识别精度和速度。为了提高制动意图识别速度,使用制动瞬间0~0.05 s的时域数据来识别一次作用制动踏板的制动意图。为了去除时域信号数据中因噪声导致的不相关特征,提高识别准确率,利用近邻成分分析(neighborhood component analysis,NCA)特征选择算法对特征进行筛选。为了提高SVM制动意图识别算法的识别准确率,利用ABC算法优化SVM的参数。离线和在线试验验证了该方法对驾驶员制动意图识别的准确率高,速度快。
1 试验数据采集
1.1 线控制动系统结构
本文研究对象为搭载线控制动系统的车辆,线控制动系统将传统的液压驱动方式转变为电机驱动方式,利用电缆传输信号和能量。各制动单元均由电机独立驱动,大幅提高了制动单元的响应速度和制动效率[21]。线控制动系统可分为液压式线控制动系统(EHB)和机械式线控制动系统(EMB),原理如图1所示。EHB系统的制动压力由直流电动机驱动的液压泵提供。当ECU接收到制动信号后,首先识别制动意图,然后根据协调式再生制动控制策略进行运算处理,计算出液压制动装置需要提供的制动力,最后通过控制液压泵和电磁阀进行制动,从而实现与制动能量回收系统的协调配合,产生线性度较高的制动效果。EMB系统相比于EHB系统,制动系统中的液压装置全部由电子机械系统代替,以直接驱动电机的方式控制制动器,从而获得更快的响应速度和更好的制动线性度。

(a)液压式线控制动系统
1.2 数据采集
为了研究线控制动系统中ECU如何通过制动信号准确且快速地识别制动意图的问题,本文使用图2所示装置模拟EHB系统和EMB系统中ECU对制动信号采集的过程。模拟装置包括电子制动踏板、dSPACE Simulator Mid-Size和Control Desk调试界面,电子制动踏板是集成了踏板感觉模拟器和电子传感器的制动动作装置,dSPACE Simulator Mid-Size是由dSPACE公司生产的标准硬件在环(HIL)仿真器,适用于系统地、自动地测试汽车ECU,该仿真器集成了DS1006处理器板卡和DS2211 HIL I/O板卡,可用作车辆信号的测量和处理。Control Desk是dSPACE公司开发的用于记录数据和调试参数的软件。
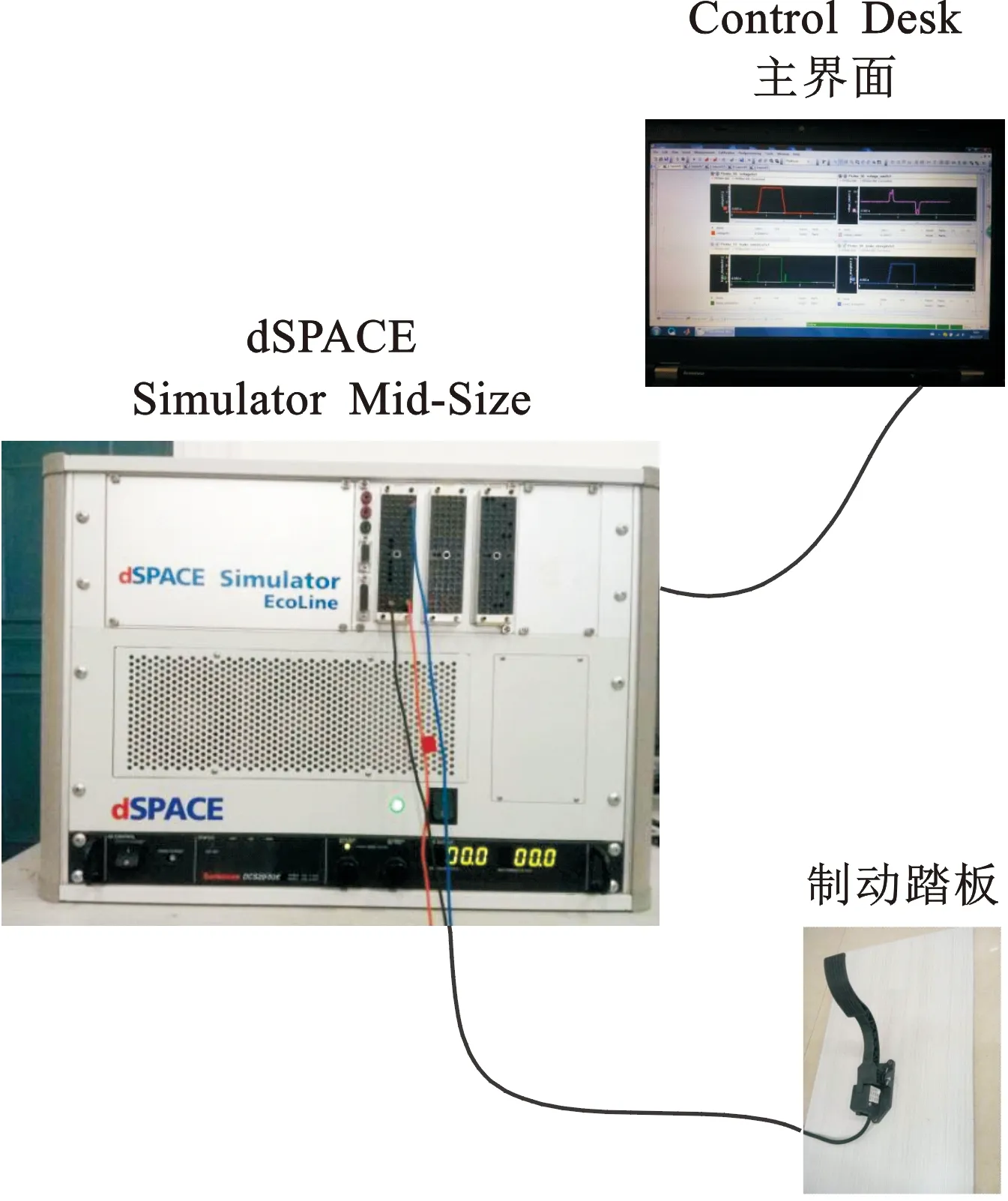
图2 dSPACE半实物仿真平台Fig.2 dSPACE Semi-physical simulation platform
在以往的研究中,踏板位移、踏板速度、踏板加速度、踏板力、制动管路压力被广泛用于制动意图识别,本文研究对象为线控制动系统的车辆,没有制动管路压力数据,所以不作考虑,踏板力信号受制动踏板间隙大小影响,且踏板力传感器采集的信号存在一定的噪声,踏板加速度信号有尖峰现象,噪声大,相比之下,踏板速度信号噪声小,且能够反映车辆制动的紧急程度,踏板位移信号噪声最小,且不受驾驶习惯影响,因此,踏板速度和踏板位移相结合,能最准确地表达制动意图[22]。本文采集了以表征制动踏板位移的电压值和表征制动踏板位移变化率的电压变化率作为制动信号,5名驾龄超过5年的驾驶员各进行30次制动试验,包含轻度制动、中度制动和紧急制动各10次,获得了图3所示的制动信号采样结果。采样周期为0.001 s,每8 s测1组数据,共获得150组制动数据。
2 制动意图识别方法框架
以采集到的数据作为样本集,设计识别方法,图4展示了本文制动意图识别方法的整体结构。主要思想是:通过ABC-SVM算法对驾驶员的制动意图进行识别,然后在不同制动环境下以不同制动强度进行制动,验证利用制动瞬间生成的数据集进行制动意图识别的可行性。

图4 制动意图识别方法的结构图Fig.4 Structure diagram of braking intention recognition method
制动意图识别方法的主要结构分两部分,一部分是根据样本数据集对识别算法模型进行训练,另一部分是在线识别。离线训练部分在装有MATLAB的计算机中实现,在线识别通过dSPACE半实物仿真平台完成,识别程序在dSPACE Simulator Mid-Size的DS1006处理器板卡上运行。

(a)制动踏板输出电压
首先,对通过dSPACE半实物仿真平台获得的样本数据集进行数据预处理和特征选择。为了在制动瞬间进行制动意图识别,将0~0.05 s作为识别数据集选择的时间范围,提取其中数据进行识别。另外,由于采用踏板位移和踏板位移变化率作为输入量,存在量纲不统一的问题,因此通过数据归一化,将数据缩放到0~1之间,使其量纲一化。再经过NCA算法计算各个特征的权重,设置权重阈值,选择权值高于阈值的特征构建特征矩阵,从而去除信号噪声引起的不相关特征和信号数据本身存在的冗余特征。与此同时,对样本数据集进行分类,并添加标签。根据驾驶员作用制动踏板时的制动目的,制动意图可分为轻度制动、中度制动和紧急制动[23]。轻度制动表示以减速为目的的制动,一般发生在车辆转弯前或进入限速路段时,通常驾驶员通过“点刹”操作或持续小开度踩踏板实现。中度制动表示以停车为目的的制动,一般发生在十字路口红灯或到达目的地需要停车时,通常实现方式为:驾驶员逐渐加大踏板开度,接近目标停车位时以较快速度加大踏板开度使得车辆停止。紧急制动表示遇到紧急情况需要快速停车的制动,通常驾驶员通过快速将踏板踩到最大开度来实现,此时制动效果主要受车辆制动性能的影响。据此,将样本集中的数据分为三类,即轻度制动数据、中度制动数据和紧急制动数据。接下来,将样本集的特征矩阵和样本集的标签送入ABC-SVM算法中进行训练。
在线识别时,首先对采集到的实时制动信号进行数据预处理和特征选择,保证实时样本的特征与离线训练时样本集的特征相对应,即特征的个数和特征在信号中的位置相同以及按相同的规则将数据归一化到0~1之间。然后,利用ABC-SVM算法训练的制动意图分类模型进行实时制动意图分类,实现制动踏板踩下的瞬间预测出本次制动的制动意图,从而将制动意图作为输入量,用于协调式再生制动控制策略的设计,以及ABS、AEB、ESP等系统的设计。
3 制动意图识别方法设计及验证
3.1 数据预处理及特征选择
根据驾驶员的制动意图对采集的样本数据进行分类标记,结果如图5所示。

(a)制动踏板输出电压
分析图5中数据可知,一次踩踏板制动的平均制动时长小于3 s,最大制动时长小于4.5 s,由于一次踩踏板制动的时间短,在此期间制动意图发生变化的概率低,因此可利用制动瞬间的信号数据对整段制动过程的制动意图进行识别。本文选取制动瞬间0~0.05 s的信号数据进行制动意图识别。从图5中该区域可以分析出,紧急制动的数据与其他两类数据有着明显的区分,而轻度制动和中度制动的数据完全交叠在一起。文献[18-20]为了解决轻度制动和中度制动识别的问题,将制动信号变换到频域,用样本熵提取信号的特征,该方法有效提高了识别率,但是为了保证提取到有效特征,识别的数据区域较大,导致识别时间在0.2~0.4 s,实时性不强。本文直接将0~0.05 s的信号数据作为特征,在识别速度方面,由于数据区域小且靠近制动开始的0时刻,因此减少了数据采集的耗时,从而缩短了制动意图识别的时间,使得制动瞬间完成制动意图识别的可行性得到提高。在识别准确度方面,直接将信号数据作为特征保留了足够的信息,从而保证了识别的准确度。直接将信号数据作为特征的方法在保留足够信息的同时也引入了噪声,即不相关特征,为了解决这个问题,在数据归一化后,使用NCA算法计算各个特征的权重,然后进行特征选择。
本文参考文献[24]设计了适用于本文数据的NCA特征选择算法,算法原理如下。
设S是一个包含n个样本的数据集,将其作为NCA特征选择算法的输入:
S={(xi,yi),i=1,2,…,n}
(1)
式中,xi为特征向量,xi∈Rp,p为向量的维数;yi为分类的标签。
从样本集中任意取一个特征向量xi,首先计算与其邻近样本的距离:
(2)
式中,dw为距离函数;wr为特征权重;xj为xi邻近样本;r为向量的维数,取值范围为1~p。
xj是xi最邻近样本的概率为
(3)
式中,Ref(xi)表示xi最邻近样本;S-i为除xi外,其余所有样本组成的样本集;k为某个核函数[24]。
使用Ref(xi)识别xi的类别,以Ref(xi)的标签作为xi的识别结果,则xi被正确分类的概率为
(4)
计算Pi的平均值:

(5)
F(w)的值随特征权重向量w的变化而变化,近邻成分分析的目标是计算最大化F(w)时的w,等价问题可写为

(6)
由此可计算出样本集S中各特征的权重。
本文将每组制动数据0~0.05 s的制动踏板电压及电压变化率信号数据合并作为特征向量,构建样本集S,利用设计的NCA算法计算各个特征的权重,结果如图6所示。因为数据采样周期为0.001 s,所以0~0.05 s内共有50个电压数据和50个电压变化率数据,合并组成了100个特征。

图6 NCA算法结果Fig.6 NCA algorithm results
对图6中的特征首先按照权重从大至小进行排序,然后以逐次加1的方式组成100个特征子集,再对各个特征子集组成的数据使用SVM分类方法训练并测试,得到对应的识别准确率,结果如图7所示。分析图中结果可知,当采用特征权重排名前48个特征构建特征子集时,识别准确率达到最大值93.33%,且在最大识别准确率下的特征子集维度最小。因此,本文选择使用这48个特征进行制动意图识别算法模型的训练。

图7 不同特征维度识别结果Fig.7 Recognition results of different feature dimensions
3.2 ABC-SVM制动意图识别算法
支持向量机(SVM)是建立在统计学基础上的机器学习方法,是解决小样本、高维度、非线性问题的有效方法。SVM算法最初仅用于解决二分类问题,后来经过改进可用于解决多分类问题。SVM多分类方法可分为成对分类法、一类对余类法和只求解一个优化问题的方法,文献[25]证明成对分类法最适合实际应用,因此本文使用成对分类法的SVM多分类方法进行制动意图识别。
SVM成对分类法的核心思想是在每两个类之间构造一个二分类SVM。
对于第i类和第j类数据,训练一个二分类SVM即是求解如下二次规划问题:
(7)
式中,ω为超平面的法向量;C为惩罚因子;ξ为松弛变量;实数b为阈值;x为特征向量;y为分类结果;下标t表示i类和j类的并集中样本的索引;φ为非线性空间映射。
则第i类和第j类之间二分类SVM的决策函数为
(8)

对于本文的三分类问题,一共需要求3个这样的决策函数。
SVM算法处理非线性分类问题时,核函数k起着关键的作用,它将原始特征空间转换到更高维的特征空间,使得原来线性不可分的样本变得线性可分。核函数一般包括多项式核函数、径向基(RBF)核函数、sigmoid核函数等。由于对数据特征进行特征选择后特征向量的维度仅为48,所以选择RBF核函数。
对于SVM分类算法,在选取合适核函数后,其性能主要受惩罚因子C和RBF核函数中表示单个样本的影响波及范围的超参数γ值的影响。本文使用人工蜂群(ABC)优化算法对C和γ的值进行优化。
人工蜂群(ABC)算法在2005年被Karaboga提出,是继遗传算法、粒子群算法和蚁群算法后一种新的智能群优化算法,具有鲁棒性好、不易陷入局部最优的特点[26]。图8所示流程图展示了ABC算法对SVM算法的C和γ参数优化,以及利用优化后SVM算法建立制动意图识别模型的过程。

图8 ABC-SVM识别算法流程图Fig.8 Flow chart of ABC-SVM recognition algorithm
3.3 算法验证
150组试验样本包括轻度制动意图、中度制动意图和紧急制动意图的样本各50组,按照7∶3的比例随机分成两份,即105组训练样本和45组测试样本。为了验证NCA特征选择算法的有效性和ABC-SVM制动意图识别算法的优越性,设计了两组试验。第一组试验中,对比了制动踏板输出电压构建特征向量(U)、制动踏板电压输出变化率构建特征向量(dU)、电压加电压变化率构建特征向量(U+dU)以及NCA算法选择出的特征构建特征向量进行制动意图识别,其中识别算法统一使用未经优化的SVM算法,具体识别结果如表1所示。第二组试验中,对比了SVM算法、BP神经网络算法、遗传算法(GA)优化的SVM算法(GA-SVM)、粒子群算法(PSO)优化的SVM算法(PSO-SVM)以及人工蜂群算法(ABC)优化的SVM算法(ABC-SVM)对制动意图进行识别的结果,其中用于识别的特征向量统一由NCA算法选择出的特征构建。具体识别结果如表2所示。两组试验中,都选取识别准确率和Kappa系数作为评价指标,准确率是指分类正确样本占总测试样本的比例,Kappa系数表示算法分类结果和完全随机的分类结果相比,分类错误减少的比例,其值在-1~1之间,越大表示分类效果越好。
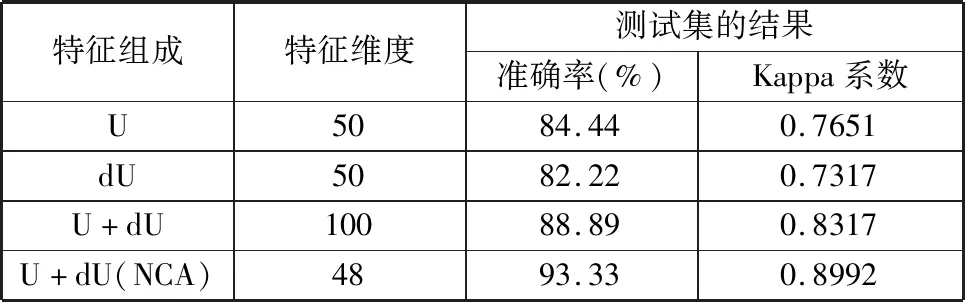
表1 不同特征组成的SVM算法分类结果Tab.1 Classification results of SVM algorithm with different characteristics
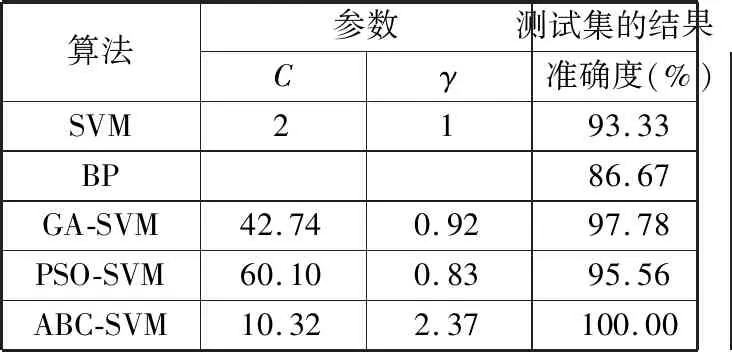
表2 不同分类算法的比较Tab.2 Comparison of different classification algorithms
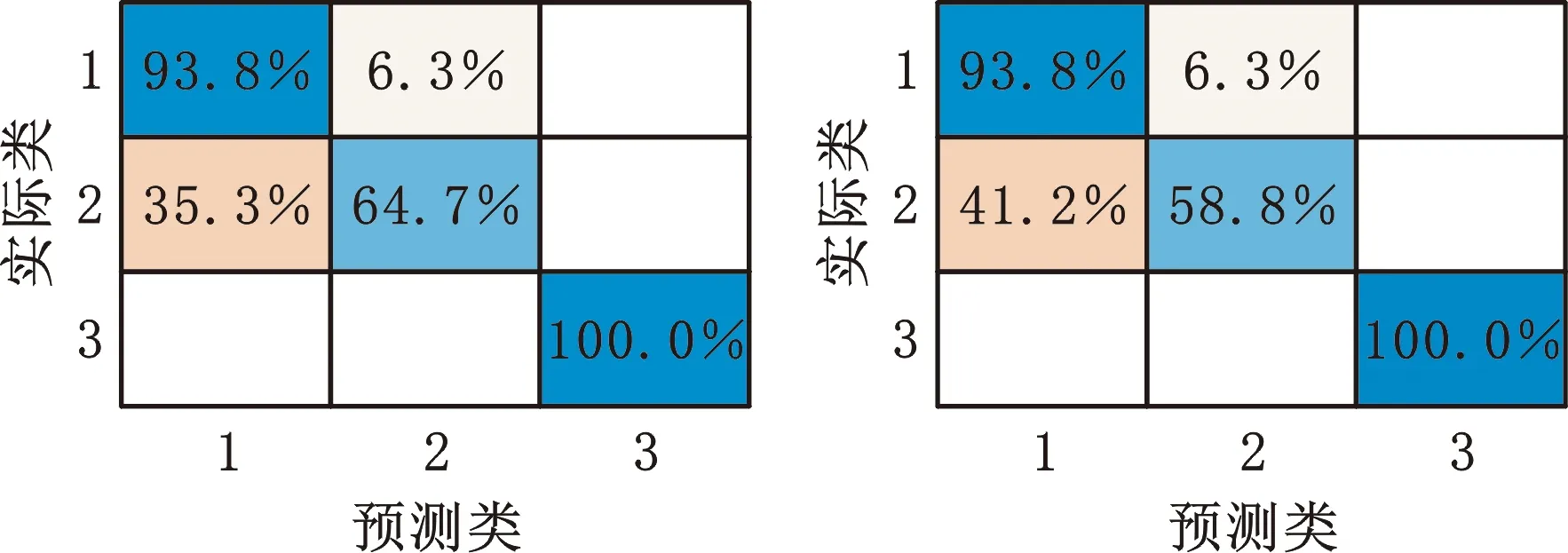
表1中识别结果显示,在单独使用U和单独使用dU组成特征向量进行识别时,识别准确率仅为84.44%和82.22%,Kappa 系数为0.7651和0.7317。而组合后准确率提升至88.89%,Kappa系数增大为0.8317,说明组合后增加了有效信息,将踏板电压和电压变化率作为识别信号能有效提高制动意图识别效果。相比于U+dU组成的特征向量,对NCA算法得到的特征向量进行识别,准确率进一步提高到93.33%,Kappa系数达到0.8992,并且特征维度从100维降至48维。结果验证了NCA特征选择算法的有效性。为了更直观详细地展示识别结果,绘制了图9所示的混淆矩阵图,其中图9a、图9b、图9c、图9d分别对应第一组试验中U、dU、U+dU和U+dU(NCA)构建的特征向量进行识别的结果。混淆矩阵图中百分数表示每一类样本识别正确的比例以及错误识别成其他类的比例,其中矩阵对角线上元素为识别正确的比例。横纵坐标中1、2、3类分别表示轻度制动、中度制动和紧急制动。对比上述四幅图可知,错误识别集中在第1类和第2类之间,第2类识别准确率低于其他两类识别准确率,在图9b所示结果中,第2类识别准确率最低,有41.2%的第2类样本错误识别成第1类。
表2中识别结果显示,相比于SVM算法,BP神经网络算法识别效果较差,准确率为86.67%,Kappa系数为0.7979。经过优化的SVM算法识别结果都好于未优化的SVM算法识别结果,其中GA-SVM算法的识别准确率达到97.78%,PSO-SVM算法的识别准确率达到95.56%,本文采用的ABC-SVM算法针对测试集的识别准确率为100%,此时C的值为10.32,γ的值为2.37。图9d、图9e、图9f、图9g、图9h分别展示了SVM、BP神经网络、GA-SVM、PSO-SVM、ABC-SVM算法更直观详细的识别结果。对比这五幅图可知,GA-SVM算法和ABC-SVM算法对应的图9f和图9h在各类算法中都有着较好的识别效果,仅图9f中第2类有5.9%的样本被错误识别为第1类。
(a)U (b)dU
在表1和表2中,Kappa系数和准确率整体成正相关关系,这是由于试验样本较为均衡,当样本不均衡时,往往Kappa系数能更好地评价算法的优劣。表2中四种SVM制动意图识别方法的识别结果优于利用BP神经网络对制动意图进行识别的结果,表明SVM方法更适合本文的小样本情况,这是因为SVM由统计学习理论发展而来,而统计学习理论是一种专门研究小样本情况下机器学习规律的理论[27]。在三种优化的SVM识别方法中,GA算法、PSO算法和ABC算法都是最初随机构建可行解,然后经过迭代优化得到最优解的,但是由于演化机制不同,最终寻优得到的C、γ也不同,导致识别准确率略有差异。图9显示的结果中,第3类(即紧急制动意图)没有一种算法识别错误,这是由于紧急制动的数据与其他两类有着明显的区分,容易正确识别。
第二组试验结果中四种SVM算法的试验结果较为相近,存在结果为偶发性的可能,为了进一步验证ABC-SVM方法相较于其他SVM方法的优越性,利用随机数按照7∶3比例随机划分训练集和测试集18次,用18次的训练集分别训练各算法的模型,再用完整数据集对各个模型进行测试,得到图10所示的结果。ABC-SVM方法在18次试验中共有9次将150个样本全部正确识别,第16次试验的识别准确率最低,为98%,此时GA-SVM方法和PSO-SVM方法的准确率分别为96%和94.67%。在18次试验中ABC-SVM方法的识别准确率均高于其他三种方法的识别准确率,平均准确率为99.55%,GA-SVM方法和PSO-SVM方法的识别准确率相近,平均准确率分别为96.7%和96.78%。未优化的SVM方法识别准确率最低,平均准确率为90.59%。
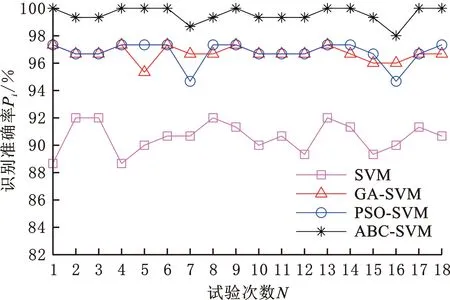
图10 四种SVM算法多次试验比较Fig.10 Comparison of four SVM algorithms for multiple experiments
4 在线识别验证
为了验证制动瞬间通过采集0~0.05 s的信号数据利用SVM方法对一次制动的制动意图进行快速识别的可行性,利用图2所示的dSPACE半实物仿真平台设计在线试验。模糊推理法结构简单,在非线性不确定系统的识别方面具有一定的优势,是国内制动意图识别研究运用最广泛的方法之一,因此选取模糊推理识别方法[11]作为对比试验。首先通过SIMULINK编写图11所示的在线程序,其中除包括SVM识别方法部分外,还包括了模糊推理识别方法部分;然后使用代码自动生成技术将程序载入dSPACE Simulator Mid-Size的DS1006处理器板卡中;最后在图2所示的试验环境下进行在线试验,得到不同制动意图下的试验结果。图12~图14分别展示了轻度制动意图、中度制动意图和紧急制动意图下,SVM识别方法和模糊推理识别方法的试验结果。为了更直观地表示识别的制动意图,分别将无制动意图、轻度制动意图、中度制动意图和紧急制动意图的输出标定为0、1、2、3。
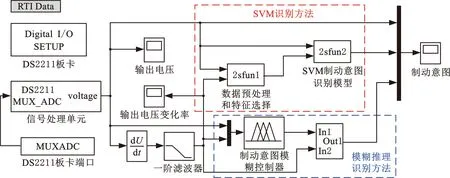
图11 制动意图在线识别程序模型Fig.11 Model of online braking intention recognition program
图12中,在24 s时刻产生制动信号,SVM识别方法在检测到制动信号后,在24.0563 s时刻准确识别出制动意图为轻度制动意图。模糊推理识别方法在24.37 s才识别出制动意图,并且24.48~24.56 s之间错误识别成无制动意图。在制动末期,SVM识别方法能准确识别制动结束的时间,在制动完全结束后才识别为无制动意图。而模糊推理识别方法在制动尚未结束时,提前0.08 s将制动意图输出为0,并且在制动结束时刻出现制动意图跳变现象。

图12 轻度制动意图下的识别结果Fig.12 Recognition results under mild braking intention
图13中,在64 s时刻产生制动信号,SVM识别方法在64.0557 s时刻准确识别出制动意图,在68.1 s时刻识别出制动已结束并输出无制动意图。而模糊推理识别方法在制动初期错误地将制动意图识别为无制动和轻度制动,在制动中后期错误地将制动意图识别为紧急制动,并且在制动末期仍然出现了图12中出现的错误识别现象,仅仅在65.32~65.88 s内正确识别了制动意图,即在整个制动过程中的大部分时间识别的制动意图都违背了驾驶员的制动意图。

图13 中度制动意图下的识别结果Fig.13 Recognition results under moderate braking intention
图14中,在96 s时刻产生制动信号,制动初期,SVM识别方法在96.0569 s时刻准确识别出紧急制动意图。模糊推理识别方法先于SVM识别方法在96.02 s时刻识别出制动意图,但是在制动末期,模糊推理识别方法从98.59 s起便无法正确识别制动意图,而SVM识别方法依旧表现良好。

图14 紧急制动意图下的识别结果Fig.14 Recognition result under emergency braking intention
由对图12~图14的分析可知,SVM识别方法对三种制动意图都有着良好的识别效果,而模糊推理识别方法识别效果略差,主要存在以下三个问题:一是制动初期的延迟识别和制动末期的提前识别为无制动;二是在制动初期和制动末期都有不同程度的制动意图识别结果跳变现象;三是对中度制动意图的识别率较低。存在第一个问题的主要原因是模糊推理识别方法执行的触发条件不合理;存在第二个问题的原因是该方法是对单个数据点进行识别,而制动意图往往需要一段连续的数据才能得以体现;存在第三个问题的原因是模糊规则和隶属函数设计不合理,对于该方法,很难设计出同时正确识别三种制动意图的模糊规则和隶属函数。
SVM识别方法利用制动初期0~0.05 s的数据对一次制动进行识别,有效避免了对单个数据点识别而产生的跳变现象,并且这种方案只需要找到制动初始和制动结束的时刻就可以很容易避免制动初期的延迟识别和制动末期的提前识别为无制动问题,另外相比于按照经验设计模糊规则,通过训练集训练算法模型,更容易准确识别制动意图。
5 结论
制动意图的识别是协调式再生制动控制策略设计的基础,通过提高制动意图识别的准确性和识别速度,可以有效提高电动汽车的安全性、经济性和舒适性。本文针对如何准确并快速识别制动意图的问题,设计了基于ABC-SVM算法的驾驶员制动意图在线识别方法。通过离线验证和在线试验得到以下结论:
(1)NCA特征选择算法能有效筛选掉信号噪声导致的不相关特征,将特征维度从100维降到48维,识别准确率从未进行特征选择时的88.89%提高至93.33%。
(2)针对本文使用的测试集样本,ABC-SVM制动意图识别算法的识别准确率最高可以达到100%,优于SVM、BP神经网络、GA-SVM和PSO-SVM算法。
(3)相较于模糊推理识别算法,ABC-SVM识别算法对制动意图在线识别的效果更好,能够在产生制动信号的0.06 s内识别出制动意图。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
法律方法(2022年2期)2022-10-20 06:42:20
福建基础教育研究(2022年4期)2022-05-16 08:48:40
法律方法(2021年3期)2021-03-16 05:56:58
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
电子制作(2017年23期)2017-02-02 07:17:06
黄河之声(2017年13期)2017-01-28 13:30:17
西北工业大学学报(2015年4期)2016-01-19 03:31:47
振动工程学报(2014年4期)2014-03-01 01:15:41