
船用雷达显示控制系统的设计与测试研究
2021-09-08 07:28尚凡葵李正臣
机械管理开发 2021年7期
尚凡葵,李正臣
(海装北京局驻青岛地区第一军事代表室,山东 青岛 266000)
引言
目前,由于我国船用产品功能单一、技术陈旧、工艺落后等因素在实际船舶系统中的应用比例还不到30%,大部分船用产品还是依靠进口。但是,鉴于时长利益等因素,国外船用产品并不愿意于我国签订专利协议,导致我国只能以高价格进口船用产品。尤其是船舶导航配套的电子仪器等,仅有屈指可数的磁罗仪、计程仪以及测深仪等。鉴于我国船舶导航雷达技术处于落后的情况以及国内对导航雷达产品的需求量极大的背景,应大力开展船用雷达系统的研究[1]。本文将着重对传统雷达显示控制系统进行设计、测试研究。具体阐述如下:
1 雷达显示控制系统的总体设计
一般的,传统雷达系统的结构如图1 所示:

图1 船用雷达系统结构示意图
如图1 所示,传统雷达系统由系统上单元和下单元两部分组成。其中,系统上单元主要指的是导航雷达的天线和对应的接收机,具体原理为由天线发射信后,并由接收机接收信号,通过对发射信号和接收信号之间的关系进行分析,得出被测目标的方位、距离以及航行速度等参数。下单元主要包括有数据处理模块和显示系统。其中,上下单元的通信依靠RS422 通信协议实现数据的传输[2]。本文所研究的雷达显示控制系统包括有显示子系统和控制子系统两部分。
1.1 雷达显示子系统的总体设计
针对雷达显示子系统的总体设计具体可从以下三个方面着手:
1)结合当前实际应用的雷达显示部分的系统情况,提出新型传统雷达显示系统的思路。
2)实现雷达显示子系统硬件与上位机操作系统的数据通信。鉴于二者的时钟不一致,主要采用异步传输机制实现硬件与上位机之间的数据通信。
3)基于对用户调研的基础上,设计雷达显示子系统的显示界面,并对各个功能模块进行详细阐述。
目前,传统雷达显示系统主要是基于Intel 处理器所设计的工况机模块,该模块存在图像显示不足、二次开发成本高的劣势。为此,本文提出FPGA 数据处理模块与ARM 显控系统相结合的显示机制为基础完成对雷达子系统的设计;同时,FPGA 数据处理模块与ARM 显控系统采用异步数据传输机制完成信息的传输。
1.2 雷达控制子系统的总体设计
雷达控制子系统的主要任务时对雷达各部分功能的硬件进行统一控制。结合用户控制需求,雷达控制子系统需具备显示扫描、系统设置、界面内容显示、功能提示以及其他一些高级功能。其中,显示扫描功能包括基本扫描模式和中心偏移模式;通过系统设置功能可对雷达门限设置、海浪抑制调节、雨雪抑制调节、杂波抑制、调谐控制以及量程选项进行设置;界面内容显示可对待探测目标的角度线、船尾线、尾迹等进行显示;其他一些高级功能涵盖了距离的测量、报警、对探测目标的跟踪以及对其他数据的采集等[3]。除此之外,雷达控制子系统还可对天线进行控制,可对天线的参数进行设置等。
2 雷达显示控制系统的设计
本节主要完成雷达显示控制系统的硬件部分和软件部分的设计。
2.1 雷达显示控制系统的硬件设计
雷达显示控制系统的关键硬件为ARM 操作系统控制模块和FPGA 数据信号处理模块。其中,ARM操作系统控制模块主要是对与雷达相关所有的设备的运行进行控制;FPGA 数据信号处理模块主要任务是对数据进行处理,并对控制信息进行显示。雷达显示控制系统的整体结构如图2 所示:
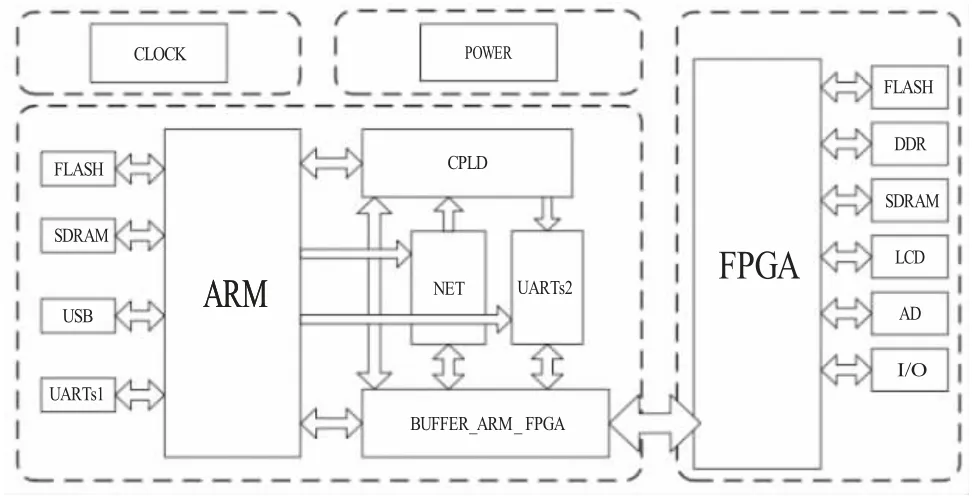
图2 雷达显示控制系统硬件结构框图
如图2 所示,为保证雷达显示控制系统能够正常发挥导航、显示、报警等功能。为ARM操作系统控制模块配置FLASH、SDRAM、USB、UARTsl、CPLD、NET、UARTs2 模块,为增强该控制模块的工作性能为其配置了三星公司的S3C2440 处理器;同样,为FPGA 数据信号处理模块配置FLASH、DDR、SDRAM、LCD、AD、I/O 模块。
此外,雷达显示控制系统的硬件结构的外部时钟由三部分组成,并设置了对应的外部晶振频率,如表1 所示:
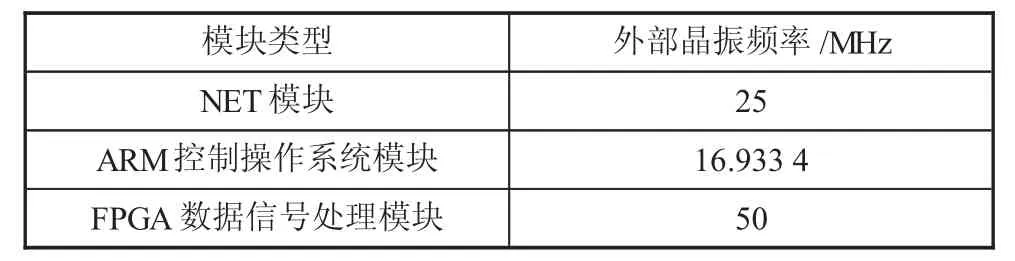
表1 雷达显示控制系统硬件外部晶振频率
2.2 雷达显示控制系统的软件设计
雷电显示控制系统的软件设计包括对雷达系统所获取的数据进行不断的筛选显示;同时,还对雷达底层硬件功能进行有效控制。
雷达显示控制软件从系统上层到驱动层在到中间层最后到底层实现所采集数据和控制信号的通信[4]。其中,雷达对待探测目标的相关参数进行采集,对应的软件控制流程如图3 所示。
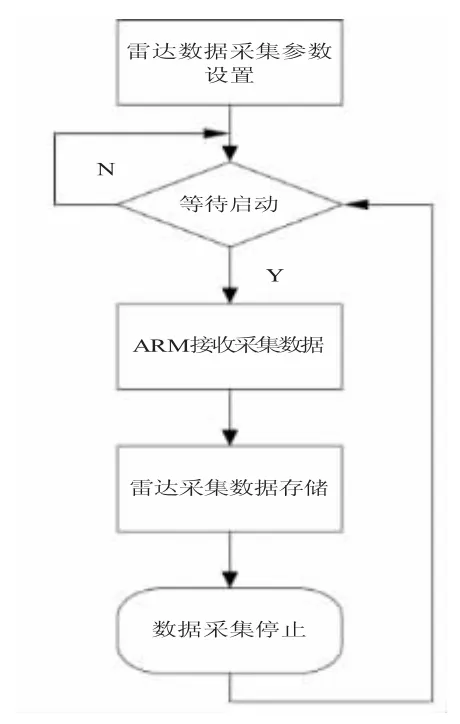
图3 雷达数据采集软件流程图
如图3 所示,针对雷达显示控制系统的数据采集功能,首先需完成对雷达数据采集参数的设置,并在雷达显示控制系统正常启动后,由ARM接收所采集的数据,并将相关数据进行存储;采集完成后等待下一阶段的采集任务。
同时,在实际探测中雷达显示控制系统还结合以采集的数据和实际探测的任务需求对天线系统进行控制,包括对天线的旋转角度、扫描频率参数等进行设置。
3 雷达显示控制系统的测试
为验证上文所设计雷达显示控制系统的性能,本节将主要对雷达显示控制系统的显示功能和控制功能进行测试。
3.1 显示功能的测试
本文所设计雷达显示控制系统加装了LCD 显示驱动设备,同时在嵌入式ARM操作系统控制模块的作用下,雷达显示控制系统所形成的图像和画面能够在15 寸的大屏幕上以高清晰度的状态展现。同时,所形成的图像和画面最大分辨率可达1 024×768。在实际测试过程中发现,所形成的图像和画面能够在上位机上及时显示,不存在卡顿和延时的现象;而且,在图层叠加的情况下对应的画面也可正常显示。
3.2 控制功能的测试
测试人员按照雷达天线参数设置流程操作完成后进行测试。经测试,雷达天线的控制模式可顺利由船舶中心基本模式切换为中心偏移模式;而且在实际控制操作中发现,整个控制响应速度较快,且各项指令传输均不存在错误[5]。总体来说,雷达控制系统满足现实模式转变的系统要求。
4 结语
导航系统作为船舶“眼睛”,其性能直接决定船舶运行的安全性和效率。我国在船舶雷达导航系统方面与发达国家还存在较大的差距,为满足实际应用需求和强化自身技术的目的,应大力开展针对雷达导航系统的研究和设计。本文基于ARM显控模块和FPGA 数据采集模块为核心设计了船用雷达显示控制系统,并经测试该系统在显示功能和控制功能均能够满足实际应用的需求。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
舰船科学技术(2022年21期)2022-12-12
山东冶金(2022年1期)2022-04-19
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2018年8期)2018-11-10
柴油机设计与制造(2018年3期)2018-10-13
中国交通信息化(2017年10期)2017-06-06
兰台世界(2017年9期)2017-06-01
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
