
基于红外视觉的输送带纵向撕裂预警方法
2021-09-08 07:28:24韩斌
机械管理开发 2021年7期
韩 斌
(山西宁武大运华盛南沟煤业有限公司,山西 宁武 036700)
引言
皮带输送机广泛应用于各种矿山现场,如从工作面的煤炭长距离运输到加工厂。输送带是带式输送机的核心部件,其状态直接影响到输送机的安全稳定运行。在采煤过程中,输送带可能会被片岩、金属螺栓等硬杂质所撕裂。此外,皮带的纵向撕裂比水平撕裂更经常发生。一旦皮带纵向撕裂,可能会造成严重的经济损失,威胁到工人的安全。输送带的损坏通常是由多种因素造成的。研究人员提出了各种方法来模拟输送带的应力和应变条件。例如,Taraba 建立了一个数学模型来模拟动力对输送带应力和应变条件的影响[1-2]。Marasová 建立模型,模拟输送带覆盖层在动力作用下的损伤[3]。Grincova 提出了一种测量各种冲击载荷对皮带影响的方法,但上述方法主要是模拟各种因素对输送机的影响带[4]。
然而,上述方法不能对皮带撕裂进行预警。为解决这一问题,乔还提出了一种可见光与红外相结合的实时系统视觉用于皮带的纵向撕裂检测[5-7]。该系统根据红外图像的直方图和固定的阈值检测皮带撕裂。然而,由于工作环境和运行时间等因素,阈值可能会发生变化,从而导致该方法的通用性较差。
通常,带式输送机运行在尘土飞扬和光线较暗的环境中,导致很难捕捉到清晰可见的输送带图像。因此,基于可见图像的泪液检测系统在这种情况下不能很好地工作。然而,红外摄像机在这种工作条件下仍然可以获得高质量的红外图像。
本文提出一种基于红外视觉的皮带纵向撕裂预警方法。该方法首先利用红外摄像机进行图像采集。然后对红外图像进行高斯滤波、图像二值化、形态学处理等操作。最后,在二值化图像中检测连通分量,根据被连接部件的检测结果,确定是否需要发出撕裂预警。
1 预警方法的提出
由于传送带是黑色的,其工作环境通常布满灰尘,很难用可见光相机捕捉清晰的传送带撕裂图像。但是如果传送带受到尖锐坚硬物体的摩擦,传送带摩擦部分的温度会显著升高,而这种现象是可以通过红外摄像机捕捉到的,可以方便地进行撕裂预警,因此可以基于红外视觉进行撕裂预警。输送带和纵向撕裂的红外图像分别如图1 所示。从图1 可以看出,正常带红外图像的灰度值没有明显差异。而输送带摩擦部分在红外图像上形成了明显的亮带,其灰度值明显大于红外图像中其他区域。在上述分析的基础上,提出了一种基于红外视觉的输送带撕裂实时预警方法。
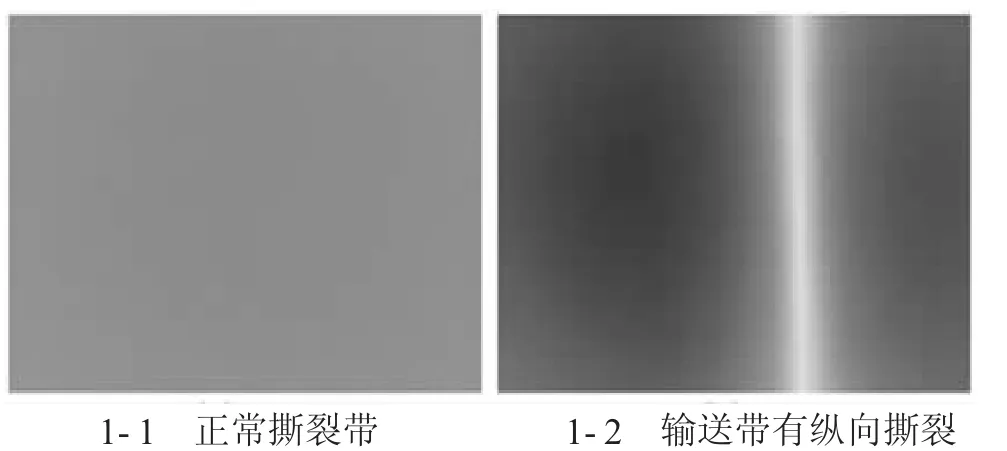
图1 正常撕裂带和纵向撕裂带的红外图像
2 预警方法理论分析
本文所提出的方法主要包括以下几个环节:红外图像采集、图像平滑化、图像二值化、图像形态学处理、连通分量检测和撕裂预警判定。
最初,红外图像是由传送带下的红外摄像机捕获的。为了减轻噪声对红外图像的影响,对红外图像进行高斯滤波平滑处理。为了减少算法的运行时间,提高算法的性能,根据红外图像的垂直投影提取图像的感兴趣区域。然后,通过本文所提出的算法对ROI 区域进行二值化。为了消除小尺寸的孤立区域,对二值化后的图像进行形态学处理。然后,在二值化后的图像上检测连通分量。最终,是否发出撕裂预警取决于连接组件的检测结果。如果出现皮带撕裂预警,输送机将立即停机。
红外摄像机采集的皮带红外图像可能受到噪声污染。为了减轻噪声的影响,对红外图像进行了二维高斯滤波平滑处理。
二值化图像是连通组件检测的前提。二值化阈值对图像二值化有重要影响。OTSU 是一种应用广泛的灰度图像自动阈值选择方法。但是OTSU 是根据当前灰度图像的直方图来计算阈值的,并没有考虑图像之间的相关性。为了进一步提高阈值计算的速度,提高红外图像二值化的质量,本文提出了一种简单的红外图像二值化自动阈值选择算法。该方法基于当前图像的灰度直方图计算一个阈值,并使用该阈值对下一个相邻图像进行二值化。换句话说,该方法是根据相邻的前一幅图像计算当前图像的二值化阈值。
3 实验平台搭建和结果分析
为了评价该方法的性能和有效性,在实验室进行了输送带纵向撕裂实验。
3.1 实验装置
如图2 所示,实验室安装了输送带纵向撕裂实验装置。实验装置包括一条输送带,输送带宽度为0.8 m,长度为12 m。输送机的速度为3 m/s,接近煤矿实际使用的速度。传送带由一根钢棒摩擦来模拟传送带被煤中的尖锐物体摩擦的场景。腰带下方安装红外摄像头,获取分辨率为320*256@30fps的红外图像。红外图像通过Eth-传输到PC机,CPU为i7-8550u,内存为16g,ssd为240g并采用基于Win10、QT5.6、OpenCV 开发的方法进行处理。红外摄像机与钢棒的安装位置如图3 所示。

图2 输送带纵向撕裂实验装置
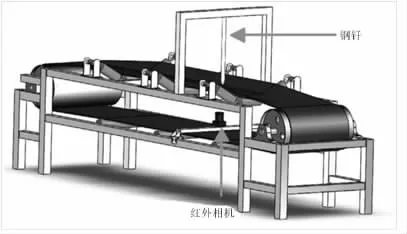
图3 红外摄像机和钢棒的安装位置
3.2 实验结果与讨论
首先评估ROI 操作对方法性能的影响,拍摄了两段三分钟的红外视频,分别是皮带正常工作和钢棍摩擦皮带。然后分别对红外视频进行有ROI 操作和无ROI 操作的处理。为了得到公平的结果,上述过程重复了三次,实验结果见表1。
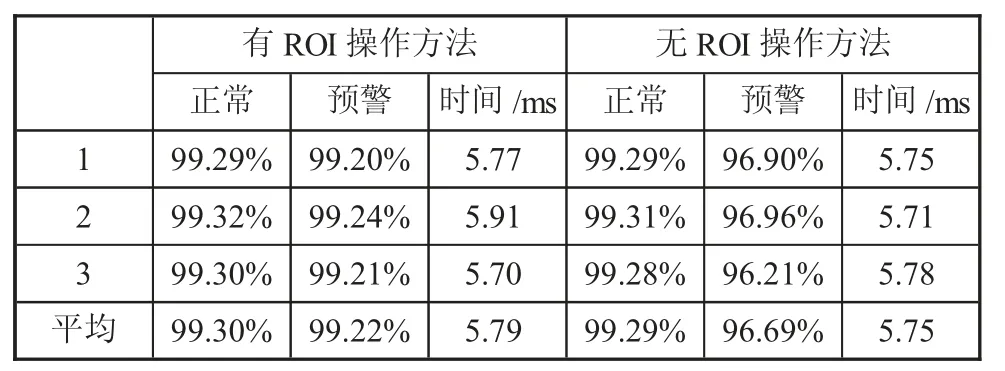
表1 该方法进行了有ROI 操作和无ROI 操作的实验
从表1 可以看出,当皮带工作正常时有ROI 操作的方法和没有ROI 操作的方法具有相似的检测精度。然而,当皮带被锋利的钢棍摩擦时,有ROI 操作的方法比没有ROI 操作的方法检测精度更高。对ROI的处理,有ROI 操作的方法比没有ROI 操作的方法需要更多的时间,但两种方法的时间差非常小。实验结果表明,ROI 操作需要一定的时间,但可以显著提高输送带撕裂预警的检测精度。因此,方法采用ROI 操作,并在输送带撕裂预警检测之前进行。
本文提出了一种新颖、简单的红外图像二值化阈值自动选择算法。为了评估该方法的有效性,分别用OTSU 方法和自动阈值选择算法进行了皮带撕裂预警实验。实验结果见表2。

表2 基于OTSU 方法和基于阈值自动选择算法的实验结果
从表2 可以看出,该算法的平均检测精度达到了99.22%,优于基于OTSU的平均检测精度为99.09%的方法。同样,在传送带正常工作的测试场景中也给出了这一事实。总之,使用阈值选择算法的方法不仅比OTSU 方法具有更好的检测精度,而且该方法比OTSU 方法需要更少的时间。实验结果证明了该方法的有效性。
在本节中,评估了ROI 操作和自动阈值选择算法对所提方法性能的影响。实验结果表明,ROI 处理可以有效提高本方法的撕裂预警精度。红外图像二值化自动阈值选择算法不仅比OTSU 算法工作速度快,而且表现出比OTSU 算法更好的性能。
4 结语
与以往的方法不同,本文提出的输送带纵向撕裂预警方法,只需要一台红外摄像机采集图像,并对红外图像进行分析,就可以确定是否需要发布输送带撕裂预警。实验结果证明所提出的方法的性能和有效性,以及所提出的方法能够满足实时系统的要求。
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
电子制作(2019年7期)2019-04-25 13:17:14
光学精密工程(2016年3期)2016-11-07 09:03:43
公民与法治(2016年4期)2016-05-17 04:09:39
设备管理与维修(2016年5期)2016-03-16 02:20:53
橡胶工业(2015年10期)2015-08-01 09:06:02
电视技术(2014年7期)2014-03-11 15:36:57
河南科技(2014年22期)2014-02-27 14:18:16
河南科技(2014年14期)2014-02-27 14:11:56
