
下行带式输送机盘式制动系统控制策略的研究
2021-09-08 07:28:48张瑞清
机械管理开发 2021年7期
张瑞清
(山西宁武大运华盛南沟煤业有限公司,山西 宁武 036700)
引言
20 世纪80 年代末,我国首次在倾斜煤层上使用了向下带式输送机。随着我国科学技术的发展和倾斜煤层产量的增加,煤矿对长距离、大容量、大倾角下行带式输送机的需求越来越大。使用该输送机可以大大减少矿山工作量,减少基设投资,缩短建设周期,产生了显著的社会经济效益[1-3]。带式输送机下行传动方案原理如图1 所示。

图1 带式输送机下行传动方案原理图
目前,国内使用的下行带式输送机制动系统主要由液压、液压动力和盘式制动系统组成。此类盘式制动系统因其单级制动、结构简单、技术成熟、成本低等突出优点而得到广泛应用[4-6]。其中,盘式制动系统的控制是保证盘式制动系统运行可靠性的关键技术,但该控制技术存在的不足也亟待解决。
1 制动速度曲线
由于输送带是黏弹性体,在制动过程中应避免应力的波动,以减少对输送带、滚筒、托辊和机架的动载荷。下行带式输送机的理想制动过程应具有以下特点:避免刹车时间过长,刹车减速小于规定减速;最大制动减速尽可能小;避免制动减速时突然变化。
目前常用的制动速度曲线如图2 所示。可以看出,在直线曲线的起始点和终点处,减速的导数趋于无穷。诺德尔曲线在T/2 点减速突然变化,减速导数不连续。哈里森曲线是连续的,没有突然减速的变化。输送机内的张力受到减速突然变化的影响,缩短了其使用寿命,不利于制动控制。因此,我们采用哈里森曲线来分析下向带式输送机的制动过程。
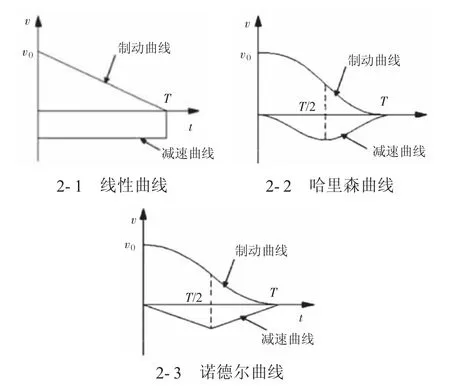
图2 制动速度和减速曲线
2 盘式制动装置
如下页图3 所示,盘式制动装置由盘式制动器、制动盘和车架组成。盘式制动装置采用正常的闭式液压控制,即在没有油压时,盘式弹簧将制动片压在制动盘上,产生最大的制动力矩。通过调节电液阀的输入电压(或电流)比例,输出油压p 可连续调节制动力矩。这样就可以灵活地控制下行带式输送机的制动速度。
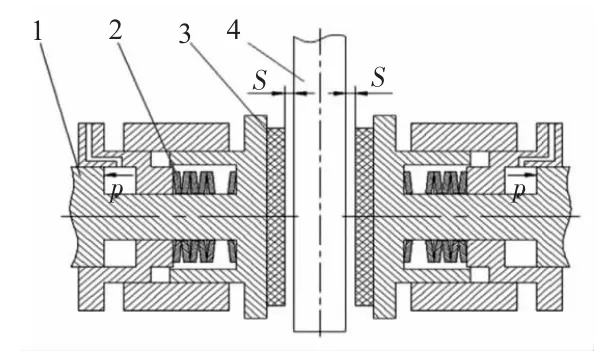
图3 盘式制动装置结构
3 盘式制动系统控制
3.1 闭环速度控制
本文所研究的盘式制动系统为速度闭环控制系统。在该系统中,比例电液阀是核心元件;这种阀门的质量对系统的性能有重要的影响。通过改变电液阀的输入电压(或电流)比例,可调节输出油压和制动力矩,以控制下行带式输送机的制动速度。利用阶跃函数作为输入信号,可以通过MATLAB 仿真系统的动态性能。闭环控制的速度曲线如图4 所示。结果表明,采用闭环速度控制时,系统响应速度过慢,稳态误差过大。因此,必须采取措施来纠正控制系统。
3.2 传统PID 控制
为了使盘式制动控制系统具有更理想的动态性能,首先需要设计并安装PID(比例积分微分)控制器对系统进行校正。在PID 控制器的应用中,其参数的调整是非常重要的。由于Ziegler-Nichols 方法操作简单,效果显著,因此本文采用Ziegler-Nichols 方法来调整PID 参数。调整结果显示,比例系数kp=208.044,积分系数ki=889.077,微分系数为kd=12.191。采用阶跃函数作为输入信号,常规PID 控制的速度曲线如图4 所示。可以看出,传统PID 控制具有响应快、稳态误差小的特点,超调量增加了24%。而超调量的增大会引起制动速度的波动,从而对输送带产生影响,不能满足下向带式输送机柔性控制的要求。因此,为了减少超调,减小对制动系统的影响,必须对PID 控制器的参数进行进一步优化。
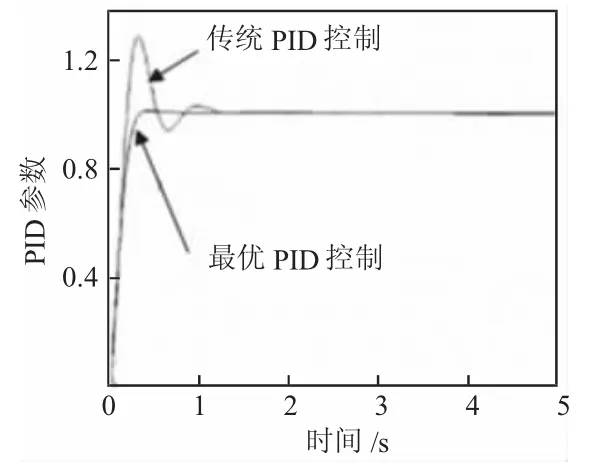
图4 控制系统阶跃响应
3.3 最优PID 控制
PID 控制系统主要有两种参数优化技术,一种是多变量优化技术,一种是随机优化技术。这两种优化技术都基于复杂的计算,需要复杂的编程。利用MATLAB 中的信号约束模块对PID 参数进行优化。该方法具有较好的优化效果。
通过信号约束调整PID 参数,使其与kp、ki、kd的初始范围相关联。经过反复试验,通过“调谐参数窗口”确定其范围,其中kp/5≤kp≤5kp;ki/20≤ki≤5ki;kd/5≤kd≤5kd,优化后的初始值(kp=208.044,ki=889.077,kd=12.191)采用Ziegler-Nichols 方法调整PID 参数,并进入MATLAB 命令窗口。在本文的模拟中,步长是可变的,时间是5 s。模拟的最佳结果是kp=207.805,ki=44.454,kd=19.423。最优PID 控制的速度曲线如图4 所示。可以看出,最优PID 控制的超调量和调节时间明显减少,超调量由24%降低到4%。减小超调量可以使输出速度快速同步预设速度,同时减少输送带在制动过程中的波动和冲击。通过MATLAB 仿真得到下行带式输送机的速度曲线如图5 所示,初始带速v0=2 m/s,制动时间t=20 s。图中预置曲线为哈里森曲线,仿真曲线为最优PID 控制的速度曲线。可以看出,模拟曲线与预设曲线之间存在一定的滞后,但滞后相当小。一般情况下,输出速度能正确跟随预设速度;该控制方法可实现对下移带式输送机的柔性控制。
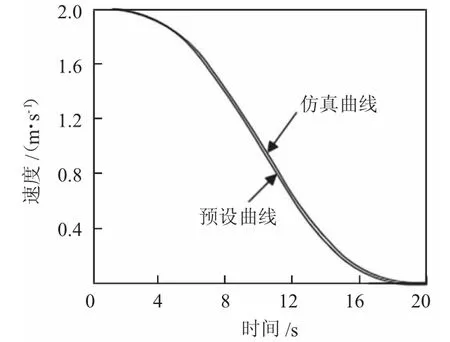
图5 最优PID 控制速度曲线
4 实验
为了验证最优PID的仿真和控制策略,本文开发了一个多功能试验台(如下页图6 所示)来模拟盘式制动系统的制动过程。本文只模拟了过载条件下的制动过程,这是最容易发生事故和严重的情况。在实验中,利用液压绞车模拟了下行带式输送机的过载。模拟实验时间设置为40 s。该系统采用不加修正的闭环速度控制。得到的实验速度曲线如下页图7-1 所示。虽然实测速度曲线与哈里森曲线相似,但与预设速度曲线存在较大的滞后,波动较大。由于系统仅由闭环速度控制而不进行校正,无法获得良好的制动控制性能。下页图7-2 为常规PID 控制的速度曲线,其中被测速度较好地同步预设速度;与闭环控制相比,响应速度快,波动小。图7-3 为最优PID控制的速度曲线,测得的速度正确地同步预设速度,波动较小。这满足了盘式制动系统的柔性控制要求。

图6 实验设备

图7 三种控制方法的速度曲线
5 结论
1)针对盘式制动系统的速度闭环控制特点,利用MATLAB 对传统PID 控制和最优PID 控制进行了仿真。通过分析比较,建立了盘式制动系统最优PID的控制策略。
2)实验结果表明,最优PID 控制能够使被测速度正确地与预设速度同步,满足下行带式输送机的柔性控制要求。实验结果也证明了理论分析的正确性和控制策略的有效性。
猜你喜欢
恋爱婚姻家庭(2023年1期)2023-02-15 13:02:50
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
航空发动机(2021年1期)2021-05-22 01:20:34
冶金设备(2019年6期)2019-12-25 03:08:52
制造技术与机床(2019年11期)2019-12-04 05:49:50
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
橡胶工业(2015年7期)2015-08-29 06:33:00
橡胶工业(2015年6期)2015-07-29 09:20:32
橡胶工业(2015年2期)2015-07-29 08:29:56
