
基于混合AUKF和HIFF的锂离子电池SOC估计
2021-09-03 02:29王志福李仁杰
电池 2021年4期
王志福,李仁杰,李 霞
(1.北京电动车辆协同创新中心,北京 100081; 2.北京理工大学机械与车辆学院,北京 100081;3.中车唐山机车车辆有限公司,河北 唐山 060040 )
动力电池是纯电动汽车的核心。准确估计电池的荷电状态(SOC),对整车控制优化、电池系统管理优化及剩余里程估计等都十分重要[1-2]。电池参数辨识是SOC估计的基础。目前,参数辨识的主要方法可分为离线辨识和在线辨识两类。由于各参数对电池的状态非常敏感,离线辨识法已无法满足所需的估计精度。在线辨识法可通过实时测量电压和电流来计算模型的参数,有可能针对不同的电池老化水平和操作条件,实现准确的性能预测[3-4]。目前,锂离子电池SOC估计的主流方法是基于模型滤波的估计方法和多算法融合估计方法,而且单种算法估计不足以满足SOC估计的需要。K.P.B.Chandra等[5]将容积卡尔曼滤波和H无穷滤波(HIFF)结合,形成一种鲁棒估计方法,并验证了鲁棒性。C.Lin等[6]提出了一种多模型融合估计方法来适应不确定的动态载荷和不同的温度,提高了能量状态估计精度和可靠性。
本文作者首先应用Thevenin电池模型和偏差补偿型递推最小二乘法(BCRLS),实现在线参数辨识。在之前研究[7]的基础上,通过仿真实验,证明BCRLS算法对削弱采集数据有色噪声的效果,再针对卡尔曼滤波类算法对模型不准确度和测量噪声不准确度较为敏感的问题,提出一种自适应无迹卡尔曼滤波(AUKF)和HIFF的融合算法,将AUKF的精度和HIFF的鲁棒性相结合,用于SOC的估计。
1 电池建模和在线参数辨识
1.1 模型的建立
等效电路模型具有简单和高效的特点,应用较为广泛。等效电路模型又可分为Rint模型、Thevenin模型、双极化(DP)模型和新一代汽车合作伙伴计划(PNGV)模型等。文献[8]基于赤池信息准则(AIC),综合考虑辨识模型参数精度、模型结构与复杂程度的平衡性计算等因素,认为一阶模型(即Thevenin模型)的AIC最小,效果最优。有鉴于此,实验将以Thevenin模型为基础进行分析。
由基尔霍夫定律推导可知,电池数学模型如式(1)所示(取放电为正)。
(1)
式(1)中:Ut为电池的端电压;Uoc为电池的开路电压;Up为阻容(RC)两端的电压;I为电路中的电流;R0为电池的欧姆内阻;Rp和Cp分别为电池的极化电阻和极化电容。
对数学模型进行离散化,再进行化简、合并,最终得到标准化的最小二乘法公式[8]。一般情况下,观测变量伴随噪声,采用均值为0的高斯白噪声,得到离散化的模型方程,最终将式(1)转换为最小二乘法的标准形式:
(2)
(3)
(4)
(5)

1.2 在线参数辨识过程
1.2.1 获取SOC-OCV曲线
利用SOC-OCV实验数据,选定SOC从0到100%的11个点作为标定点,拟合出开路电压曲线,且不再考虑充放电的迟滞效应,而是取平均值。
1.2.2 算法递推过程
在参数辨识的方法中,最常见的方法是递推最小二乘法(RLS),但文献[9]证明,在系统输入噪声为有色噪声时,RLS的估计是有偏差的,会降低模型的准确性。实验提出BCRLS法进行锂离子电池的模型参数辨识,递推过程如图1所示。
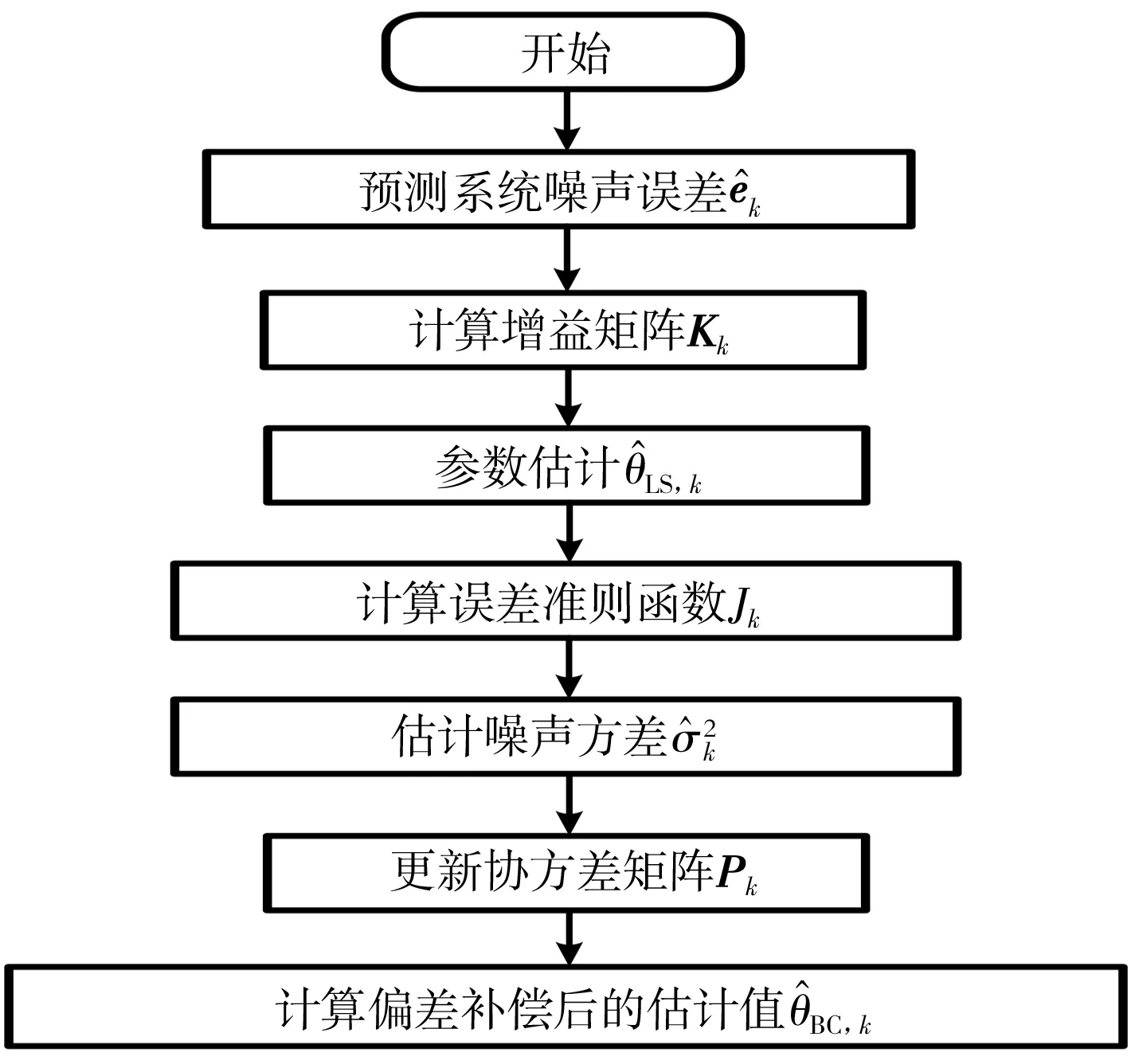
图1 偏差补偿型递推最小二乘法流程
1.3 参数辨识结果分析及验证
进行开路电压测试实验,从而获取电池的SOC-OCV曲线;再进行动态应力测试(DST)工况实验,以验证参数辨识的准确性。在MATLAB/Simulink中搭建参数辨识算法的仿真模型。以Thevenin模型为基础,将BCRLS法得到的辨识结果代入其中,得到模型的输出端电压。输出端电压和实际端电压的对比图见图2。

图2 端电压与模型输出电压比较
从图2可知,仿真结果与实际电池的端电压接近,在SOC较高时,可维持在0.03 V以内;当SOC<10%时,误差显著增大,这是电池的内部特性变化随着电量减小而变得剧烈所导致的,但是该误差仍维持在0.10 V以内。以上结果说明,该参数辨识方法的精度较高,适用于动力锂离子电池的参数辨识。
2 SOC估计方法
在精确建模和参数辨识的基础上,引入AUKF和HIFF的融合算法,并应用于电池充电状态估计中,可提高SOC估计的准确性和鲁棒性。
2.1 基于自适应无迹卡尔曼滤波法的SOC估计算法
卡尔曼滤波主要适用于线性系统估计,而动力电池是一个非线性动态系统,因此提出AUKF算法。AUKF是卡尔曼滤波在非线性领域的扩充应用,更适用于强非线性系统,对电池SOC估计具有更好的效果。
当用AUKF估计电池的SOC时,状态变量可选择SOC和RC网络的电压、电流作为输入量,端电压作为输出量。状态方程和观测方程为:
(6)
(7)
式(6)、(7)中:τ=RpCp,为时间常数;zk为电池k时刻的SOC;Δt为采样时间间隔;Ca为电池在当前条件下的最大可用容量。
结合式(6)与式(7),可得到非线性状态空间方程:
(8)
式(8)中:x、u和y分别为系统的状态向量、输入向量和观测向量;ω、ν分别为系统噪声和观测噪声;A、B、C和D分别为各状态空间方程的系数矩阵。各参数的具体形式如式(9)所示。
(9)
AUKF算法估计SOC的递推过程如图3所示。

图3 AUKF算法估计SOC
2.2 基于H无穷滤波的SOC估计算法
卡尔曼滤波类算法在最优估计方面虽然效果较好,但噪声矩阵应是已知的,且总体趋势应为高斯白噪声。对于实际情况,无法满足这种噪声要求,因此,提出HIFF滤波算法,以应对因噪声而导致的不准确度。
HIFF滤波理论以估计算法与随机噪声条件的相互博弈为基础,计算新息矩阵并得到使其最小时的状态值。算法的递推过程如图4所示。

图4 HIFF滤波算法估计SOC
2.3 混合AUKF/HIFF滤波算法
针对卡尔曼滤波类算法的缺陷,实验提出HIFF鲁棒性算法。然而,相比于卡尔曼滤波类算法,该算法的初始参数更多,因此更依赖于初始值的设定。且该算法对随机误差不做任何规定,力图适用于自然界使误差最大化的情况,因而其估计过程比较保守。在某些情况下,噪声情况既不是AUKF前提条件中的高斯白噪声,也不是HIFF前提条件中的纯随机噪声,而是介于两者之间的复杂噪声。实验提出一种能够兼具两者优点的方法,即混合AUKF/HIFF法。
AUKF中新息矩阵的方差为:
(10)
当系统模型和噪声统计模型出现偏差时,式(11)成立,卡尔曼滤波器发散。
(11)
式(11)中:λ为安全系数。
为了实现混合滤波算法的权值分配,根据理论推导,定义指标Ji为:
(12)
式(12)中:Tr表示矩阵的迹。
对过去一段时间的指标Ji取平均值,得到:
(13)
式(13)中:M为采样的窗口长度,一般为[10,100]。
之后,定义能够评价滤波精度的上边界和和下边界。当AUKF精度满足要求时,则式(13)中的平均指标小于上边界。若AUKF滤波结果发散或精度很差,则平均指标大于下边界值。对于其他情况,则可以认为滤波的效果一般,平均指标位于上边界与下边界之间。一般取上边界的范围是[1,2],下边界的范围是[30,70]。
设AUKF和HIFF的估计值分别为x2和x∞,则可以根据权值分配方法建立融合估计器:
(14)
式(14)中的自适应加权系数dk+1为:
(15)
式(15)中:a和b用来反映权值自适应调节的灵敏度情况,由经验所得。
根据上述理论,可以设计基于AUKF/HIFF混合算法的SOC估计器。算法结构示意图如图5所示。

图5 AUKF/HIFF混合算法结构
2.4 实验验证和分析
使用DST动态仿真工况进行SOC估计算法的验证。混合算法的优点是综合了AUKF和HIFF的性能特点。为验证该结论,在实验数据的基础上,分别增加了均值为20 mA、50 mA的高斯白噪声(电流偏置)。算法均在MATLAB/Simulink中实现,输入不同实验数据的SOC估计误差见图6。
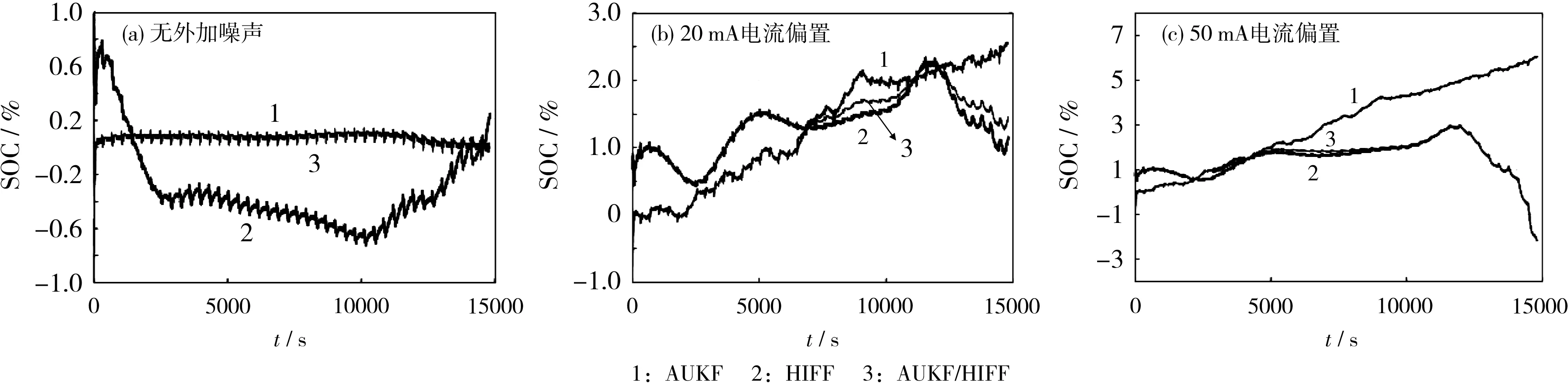
图6 AUKF/HIFF混合算法的SOC估计误差Fig.6 SOC estimation error of AUKF/HIFF hybrid algorithm
从图6可知,当无外加噪声时,两种滤波的SOC估计误差都很小,此时由于未达到设定的AUKF评价指标下限,权值为1,HIFF估计结果未启用,混合滤波曲线与AUKF滤波曲线重合。在增加20 mA的电流偏置之后,AUKF的估计误差增大,并且有逐渐扩大的趋势。SOC的误差随着时间推移变为两段:第一阶段,AUKF的估计精度仍然较好,此时混合滤波曲线与AUKF曲线重合;第二阶段,AUKF估计误差增大,此时融合滤波器开始起作用,混合估计结果为两算法的加权平均,且随着时间的推移,权值不断改变。在增加50 mA的电流偏置之后,模型误差变得更大,AUKF估计误差更大。SOC估计误差随着时间推移变为3个阶段:第一、二阶段与20 mA电流偏置时相同;当AUKF误差继续增大时,可以认为AUKF算法估计结果发散,这时它的权值为0,混合滤波曲线与HIFF曲线重合。
结果表明,混合AUKF/HIFF滤波算法完全满足设计初衷,具有足够的精度和鲁棒性。
3 结论
首先对比了锂离子电池的不同模型,选取了Thevenin模型作为研究对象,并在MATLAB/Simulink中搭建了Thevenin电池模型,提出了利用BCRLS算法进行电池的在线参数辨识,确定了电池的欧姆内阻、极化电阻和极化电容。利用DST工况对模型进行验证,经验证模型具有很高的精度,端电压误差小于0.10 V,适用于动力电池的动态特性。
其次,简要概述AUKF算法和HIFF算法进行SOC估计的流程,针对AUKF算法在有色噪声条件下估计鲁棒性不足的情况,结合HIFF滤波器在有色噪声条件下鲁棒性更强的特点,建立混合AUKF/HIFF估计算法。验证了该算法在有色噪声条件下,能够有效避免AUKF算法的局限性,同时克服HIFF算法估计过于保守从而无法保证估计精度的情况,使估计误差基本控制在2%以内,证明了混合算法能够提高估计精度和鲁棒性。
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
北京航空航天大学学报(2017年9期)2017-12-18
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
