气动柔性三肌肉轴向驱动器力学性能研究
2021-08-31 09:46:54许文智武广斌薛皓然周程程孙宇博
吉林化工学院学报 2021年7期
许文智,武广斌,王 佩,杨 航,薛皓然,周程程,孙宇博
(北华大学 机械工程学院,吉林 吉林 132021)
近年来,随着人们生活水平的日益提高,服务型机器人的市场越来越大.服务型机器人具有良好的安全性和人机交互能力[1-7].常见的直线驱动器如直线电机、液压缸等,其重量较大、体积大、柔性差的缺点[8]不能满足服务型机器人对安全性的要求,因此对柔性直线驱动器需求愈发迫切.本文设计研发了一种新型的轴向驱动器:气动柔性三肌肉轴向驱动器.该轴向驱动器具有重量轻、柔性好、无污染性的特点,弥补了常见轴向驱动器重量大、柔性差的缺点.
1 轴向驱动器的结构和变形原理
1.1 轴向驱动器结构
轴向驱动器结构如图1(a)所示,硅氟橡胶管嵌套在轴向密布排列的约束环内部.约束环内部圆孔内装有3个导向杆,导向杆两端有螺纹分别与上、下端盖连接固定.硅氟橡胶管通过上、下堵头进行密封形成人工肌肉,下堵头留有通气口连接快插接头.导向杆为伸缩杆可轴向伸长缩短,利用导向杆轴向伸长来控制硅氟橡胶管的伸长方向.实物如图1(b)所示.
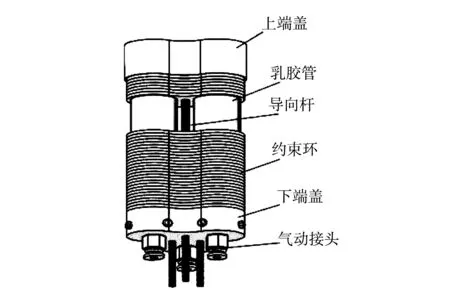
(a) 轴向驱动器三维结构

(b) 轴向驱动器实物图1 轴向驱动器结构
1.2 轴向驱动器变形原理
如图2(a)所示硅氟橡胶管通入气压时的变形原理图,硅氟橡胶管开始膨胀,由于约束环的约束作用硅氟橡胶管不会发生径向膨胀只进行轴向膨胀.硅氟橡胶管膨胀时会挤压带动约束环轴向均匀分布在伸长后的硅氟橡胶管周围继续起到径向约束的作用.人工肌肉轴向伸长推动上端盖沿着伸缩杆的方向进行位移.图2(b)为不通入气压时轴向驱动器原理图.
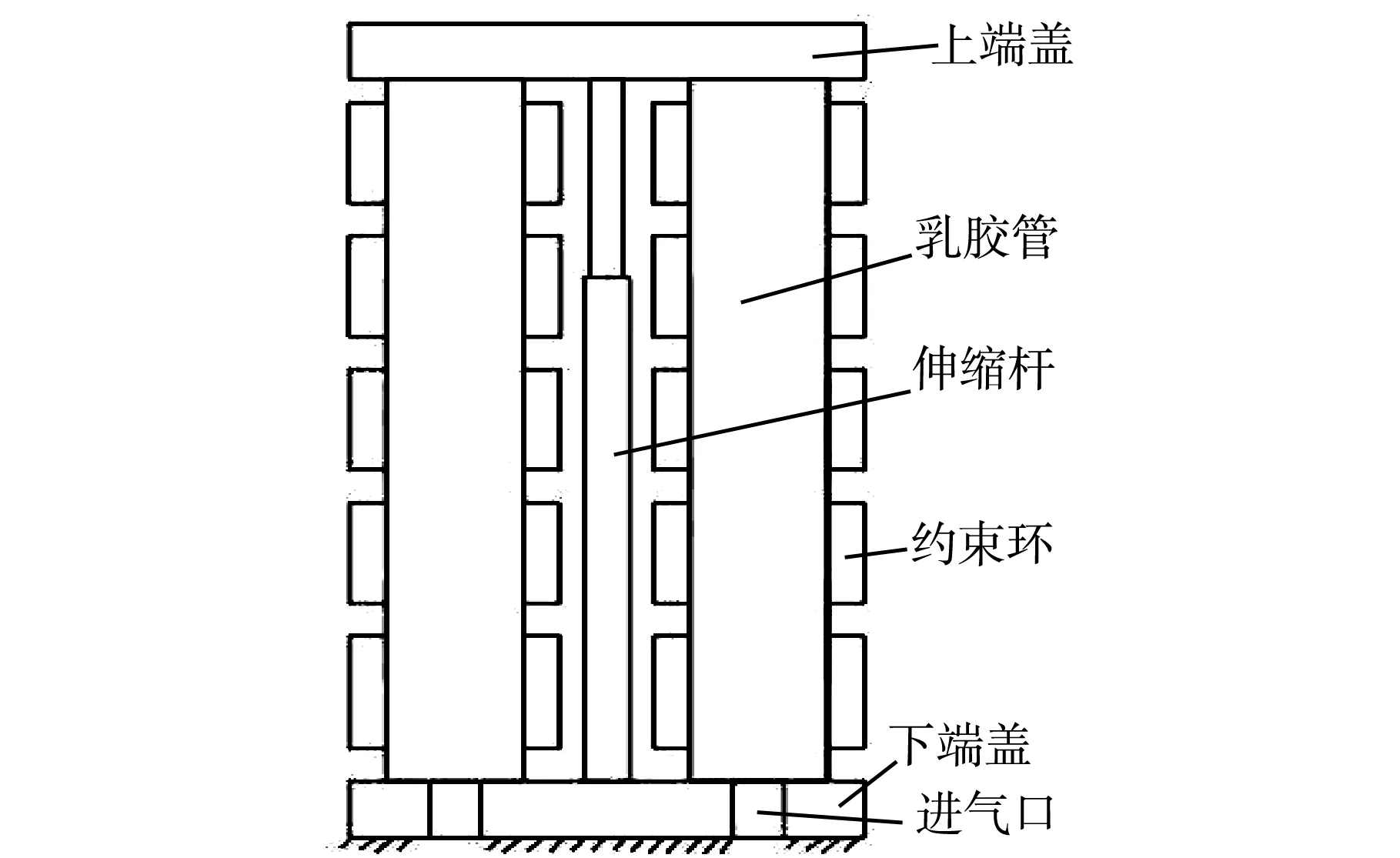
(a) 轴向驱动器通入气压
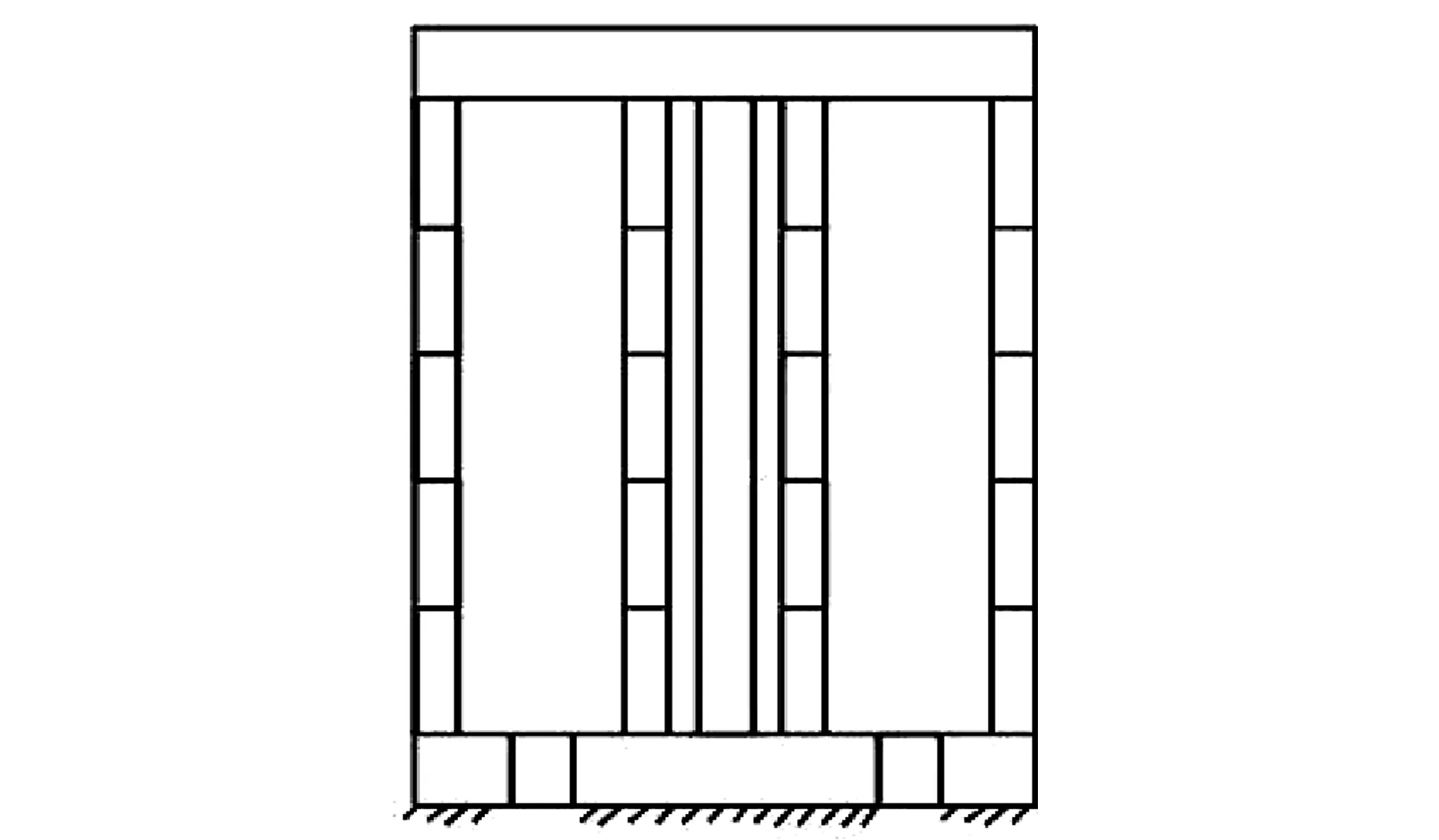
(b) 轴向驱动器不通入气压图2 轴向驱动器形变原理
2 轴向驱动器的基本参数和力学性能的理论推理
2.1 轴向驱动器的基本参数
轴向驱动器的基本参数如表1所示,其中d1为硅氟橡胶管外径;d2为硅氟橡胶管外径;l为硅氟橡胶管有效变形长度;d3为约束环圆形通孔的直径;h为约束环壁厚.
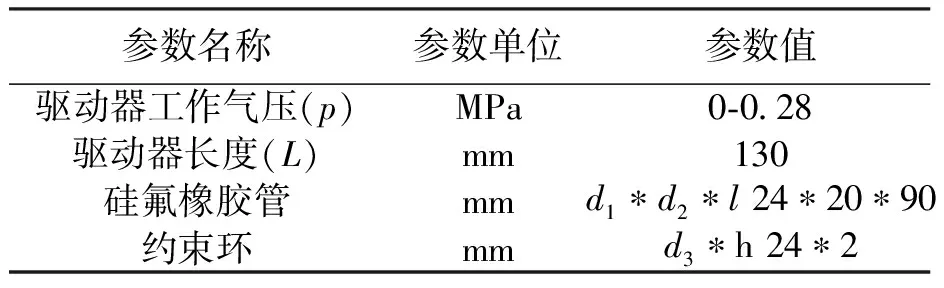
表1 轴向驱动器基本参数
2.2 轴向驱动器力驱动力分析
轴向驱动器工作时,硅氟橡胶管内通入气压,在压强的作用下会给上端盖一个轴向的推力Fp;硅氟橡胶管变形后会产生变形阻力Fn;还会产生对负载的一个轴向驱动力Fd.如图3所示由静力学平衡方程可得:
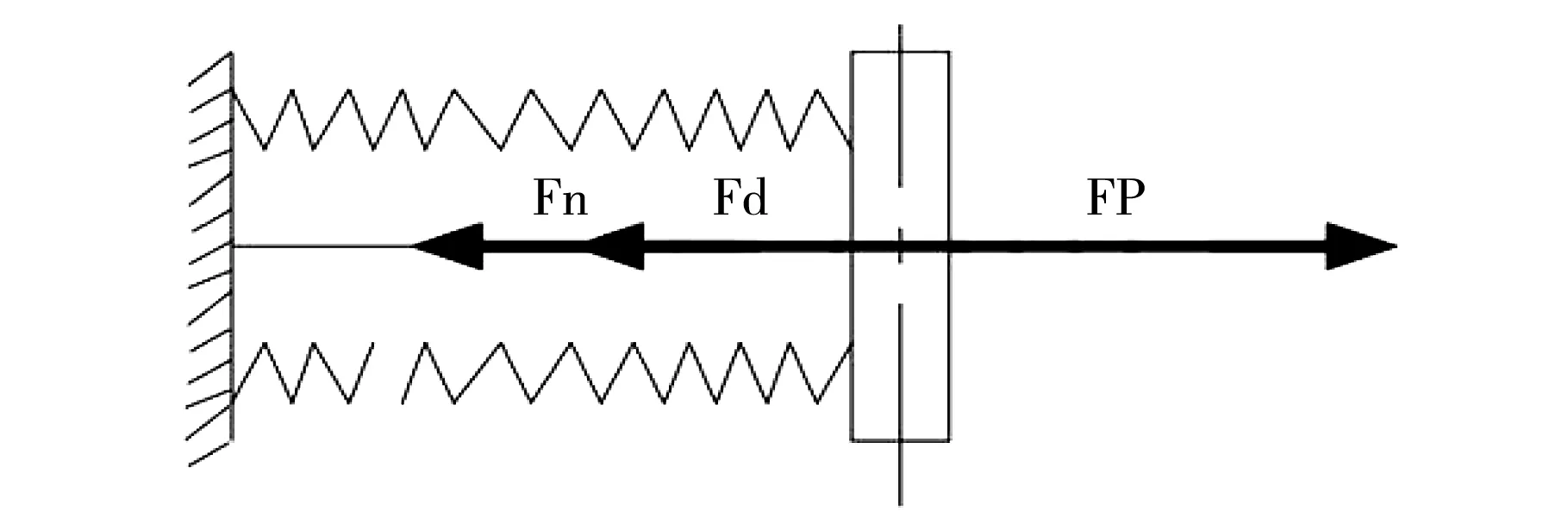
图3 轴向驱动器驱动力分析力学模型
FP=Fd+Fn.
(1)
由力与压强面积的关系可知,压强的给上端盖一个轴向的推力Fp的公式为:
FP=p*s,
(2)
式中,p为硅氟橡胶管内通入的气压;s为硅氟橡胶管内有效的工作面积.
驱动器工作时硅氟橡胶管会伸长变形,伸长量为Δl,由于硅氟橡胶管在变形过程中体积V不发生变化且硅氟橡胶管因为膨胀始终与约束环腔体接触,因此硅氟橡胶管外径d1不变,由此可以得到:
不通入气压时 :
(3)
通入气压时:
(4)
联立(3)、(4)得 :
(5)
联立(2)、(5)得 :
(6)
因为硅氟橡胶管在通入气压后在约束环的作用下轴向膨胀,所以硅氟橡胶管变形可以看作拉压杆大变形.根据弹性力学的经典理论,并考虑硅氟橡胶管大变形后的几何因素,橡胶管的作用力为[9]:
(7)
式中,E为硅氟橡胶管弹性模量,E=1.116 MPa;A为硅氟橡胶管在膨胀情况下的环形截面面积.由上述可知硅氟橡胶管体积V和外径d1不变得:
V=A(l+Δl).
(8)
联立(3)、(8)得 :
(9)
联立(7)、(9)解得:
(10)
联立(1)、(6)、(10)得:
(11)
由上述公式可知当伸长量Δl不变时,通入气压p越大驱动力Fd越大;通入气压p不变时,伸长量Δl越大驱动力越小;伸长量Δl为0时驱动力Fd最大为给端盖轴向的推力Fp.
2.3 轴向驱动器伸长量分析
轴向驱动器在没有负载的情况下工作时,硅氟橡胶管内通入气压,在压强的作用下会给上端盖一个轴向的推力Fp;硅氟橡胶管变形后会产生变形阻力Fn.由于没有负载则Fd=0.如图3所示由静力学平衡方程可得:
Fp=Fn.
(12)
联立式子(6)、(10)、(12)得:
(13)
式(13)为轴向驱动器轴向伸长量与气压之间的关系,将式中的高次微小量忽略得到:
(14)
简化公式以后存在一定误差,但是比较微小.
3 轴向驱动器的力学性能实验
3.1 轴向驱动器驱动力实验
搭建实验平台如图4(a)所示,实验平台由气源、精密减压阀、数显式推拉力计、气压传感器、驱动器本体组成.实验原理如图4(b)所示,驱动器通过螺栓固定在XY工作台上且与地面平行.测力计通过螺栓固定在XY移动滑台上面,钢丝绳一端与驱动器上端盖固定连接,另一端与测力计固定连接.气源通过精密减压阀为驱动器冲入不同压强的气压.
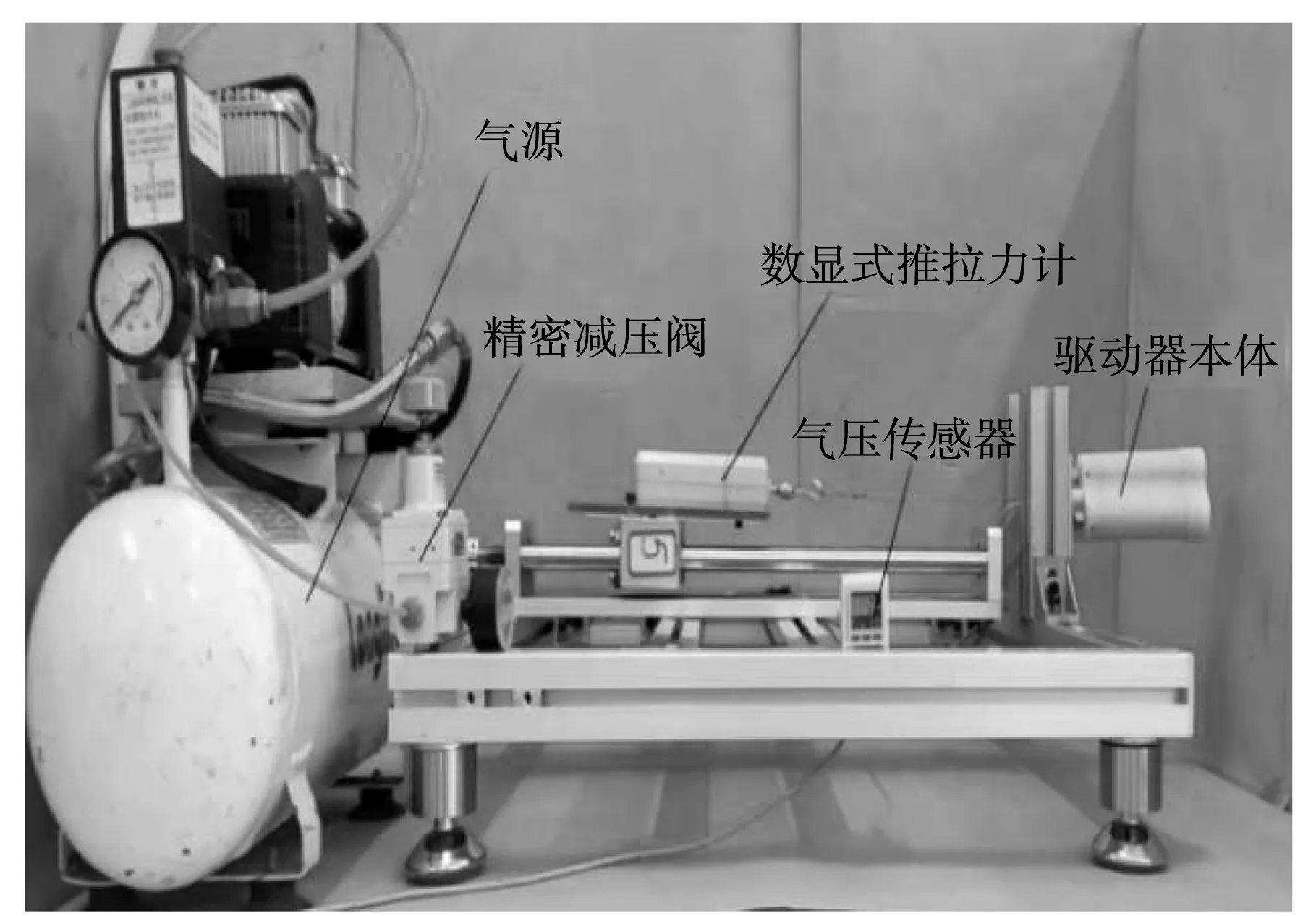
(a) 实验平台
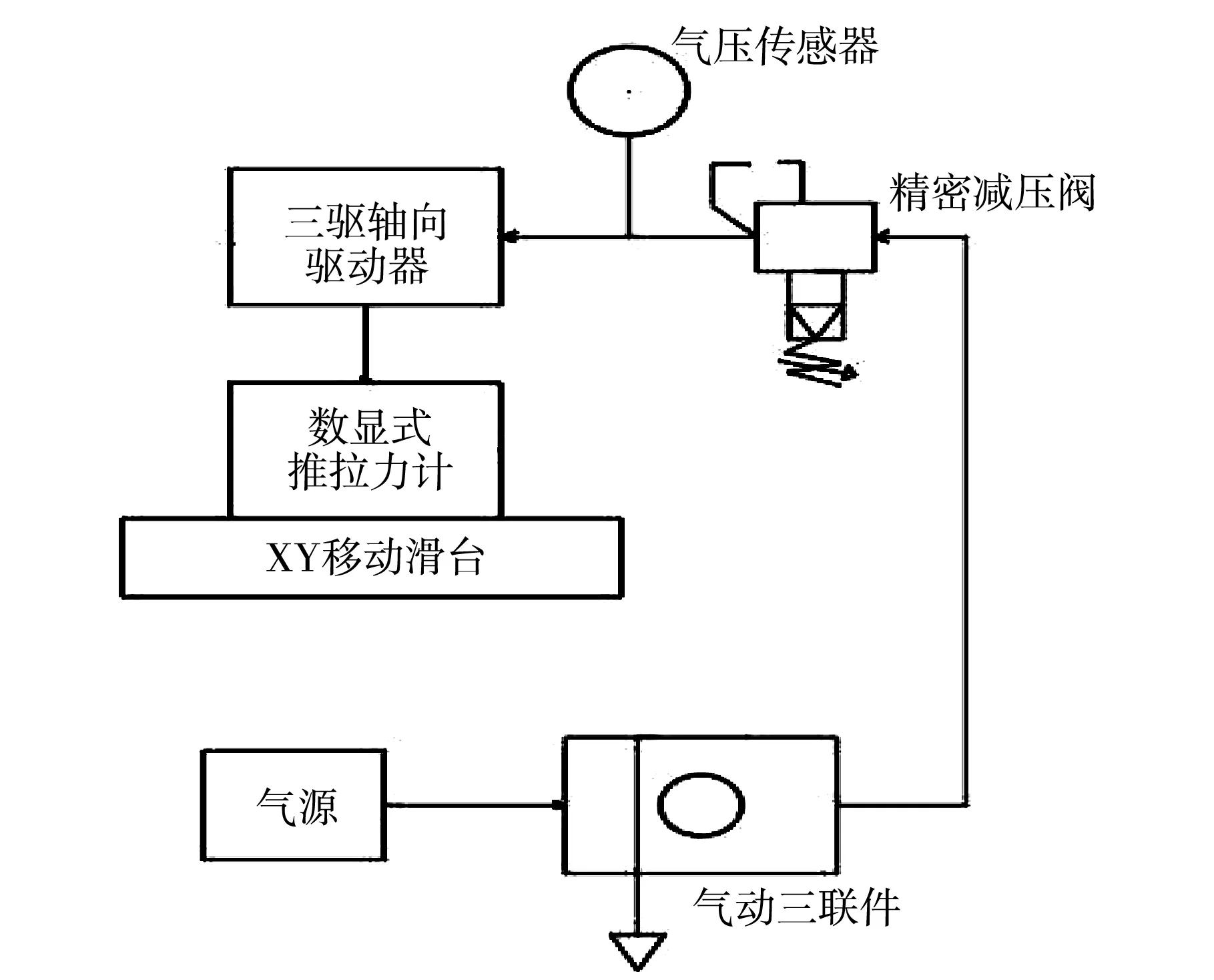
(b)实验原理图4 轴向驱动器驱动力实验
分别测量3次得到驱动器伸长量为0的情况下,驱动力与通入气压的图像,并且与理论进行比较,如图5所示.
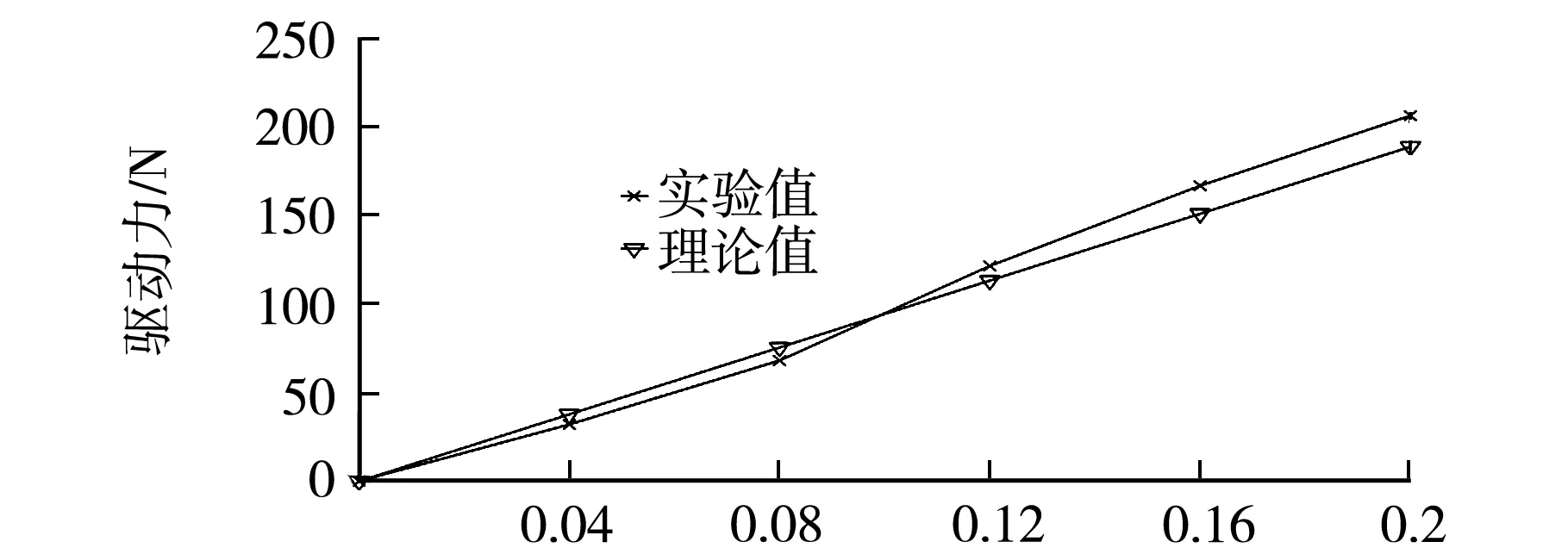
气压/MPa图5 轴向驱动器驱动力与气压关系图
由图5可知在伸长量为0的情况下轴向驱动器的实验值和理论值趋势相对吻合,且驱动力和通入气压呈正相关.
移动XY移动滑台获得驱动器在不同气压下伸长量与驱动力的关系,冲入的气压分为5个等级(0.04~0.20 MPa),分别测量3次得到实验数据后取平均值,并画出实验曲线如图6所示.
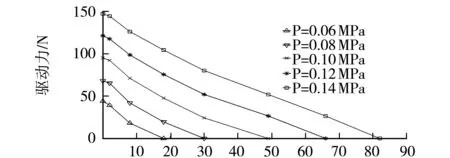
伸长量/mm图6 轴向驱动器驱动力和伸长量关系
由图6可知在相同气压下,随着伸长量的增加驱动力减小,与理论相契合,且在各种气压环境下随着伸长量的增加,驱动力的减小速率先由小变大再变小;伸长量相同的情况下驱动力与气压成正比.
3.2 轴向驱动器伸长量实验
搭建实验平台如图7(a)所示.实验平台由气源、精密减压阀、数据采集处理系统、气压传感器、驱动器本体、三维运动捕捉系统、计算机、标记点组成,实验原理如图7(b)所示.将轴向驱动器固定在底座上与地面垂直,将标记点贴在驱动器上下端盖侧面,气源通过精密减压阀对驱动器人工肌肉进行充压,使轴向驱动器轴向伸长.三维运动捕捉系统通过捕捉标记点的变化得到不同气压下驱动器伸长量的实验数据,通过数据采集系统将实验数据传递到计算机.该实验测量3次,取平均值并于理论值进行比较得到图8.

(a)轴向驱动器伸长实验系统
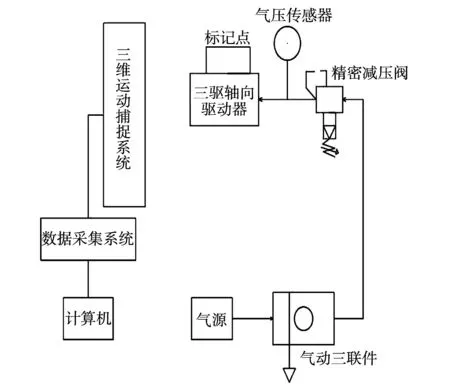
(b)轴向驱动器伸长实验原理图7 轴向驱动器伸长实验
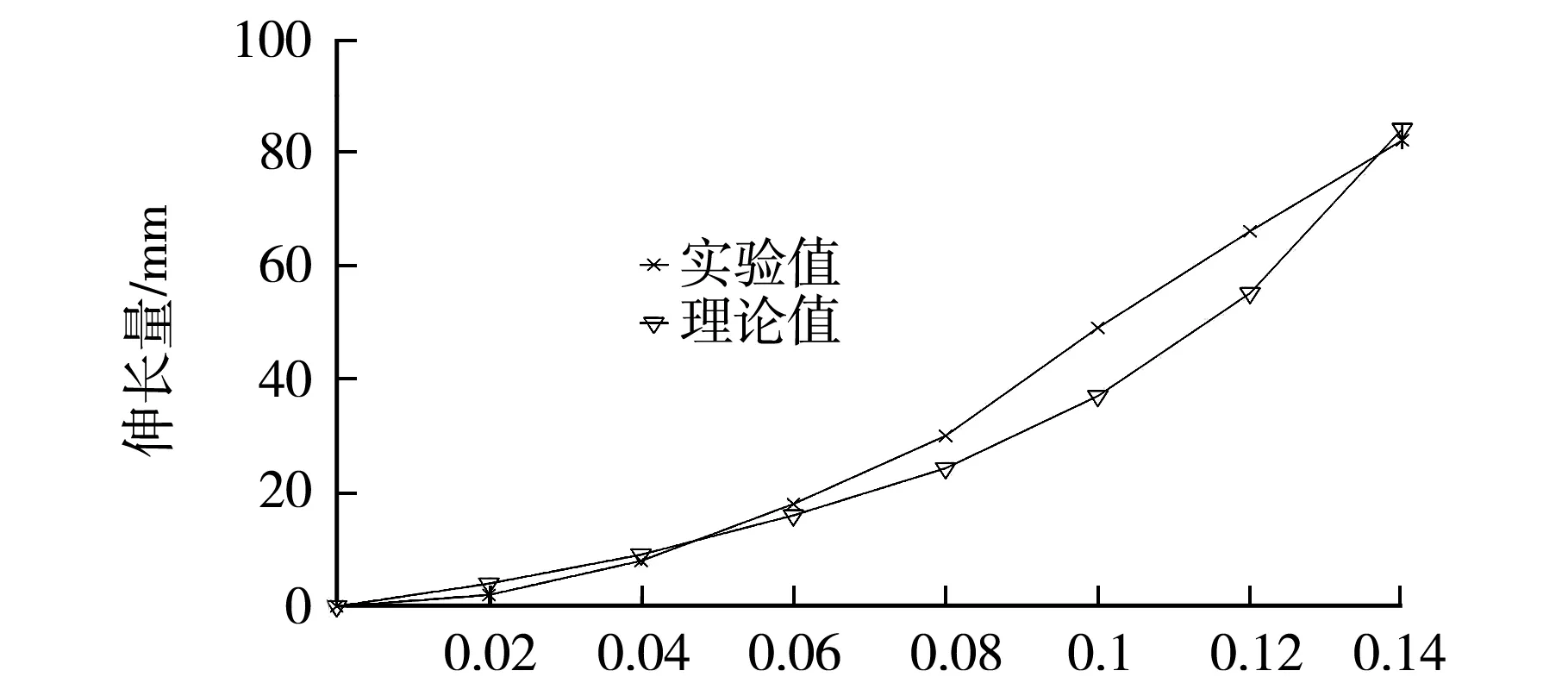
气压/MPa图8 轴向驱动器伸长量与气压关系
由图8可知实验值与理论值对比趋势比较吻合,后半段理论数据和实验数据有一定差距是由于忽略高次微小量导致的.
4 结 论
为了克服市面上机器人所用直线驱动器重量大、柔性差的缺点,设计研发了一款三肌肉气动柔性驱动器.该驱动器具有重量轻、柔性好、无污染等特点.推导出了不同气压下伸长量与驱动力的公式和伸长量与气压的公式,并对该驱动器进行实验,通过实验数据和理论数据进行比较分析.经研究得出轴向驱动器伸长量不变时,通入气压越大驱动力越大.轴向驱动器通入的气压不变时,伸长量越大驱动力越小.为以后轴向驱动器的控制和应用提供了一定的基础.
猜你喜欢
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
中国外汇(2019年9期)2019-07-13 05:46:30
家庭影院技术(2018年9期)2018-11-02 05:31:30
现代企业文化(2018年13期)2018-06-09 08:22:15
家庭影院技术(2018年3期)2018-05-09 07:06:17
橡胶工业(2015年7期)2015-08-29 06:32:54
橡胶工业(2015年11期)2015-08-01 09:08:40
橡胶工业(2015年8期)2015-02-23 23:41:15