气动柔性五指机械手运动空间与抓取实验研究
2021-08-31 09:46:52武广斌
吉林化工学院学报 2021年7期
梁 正,武广斌
(北华大学 机械工程学院,吉林 吉林 132021)
人手的一系列行为包括强力抓握、精巧操作和交流手势等,这些活动的实现主要依靠人手复杂的生物力学结构和神经控制[1-3].这要求研制的机械手首先在结构上具有多个自由度,动作上具有一定的柔顺性[4].目前研究柔性的机械手多数为电机驱动、气液驱动和功能材料驱动等[5].气动柔性驱动器主要由橡胶和增强型纤维组成,适应性和柔顺性比较强,可用于对柔软、脆、嫩等物体的安全抓取[6-7].
本文采用气动单向弯曲关节作为机械手手指关节,完成了气动柔性机械手样机制作、运动空间和抓取实验,机械手可对生活中常见的各种形状的物体进行抓取,具有良好的柔顺性和适应性,为以后机械手的运动学和动力学研究奠定了基础.
1 气动柔性五指机械手结构与功能
1.1 气动柔性机械手手指结构
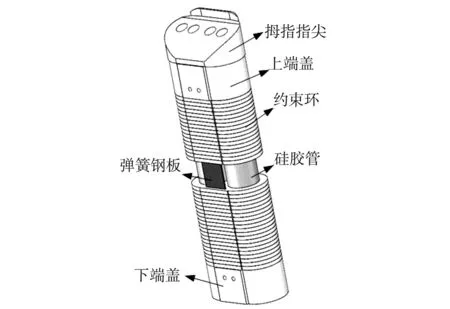
拇指由双驱动单向弯曲关节构成,其关节主要由硅胶管、约束环、弹簧钢板和上、下端盖等组成(图1).
(a)拇指结构三维模型
(b)拇指实物图图1 拇指结构
关节外部为形状相同的一组紧密排布的约束环,约束环一侧矩形孔内装有弹簧钢板,另一侧并列分布两个独立的弹性硅胶管,使用人工肌肉密封件密封硅胶管两端,固定安装于上、下端盖上.通入压缩气体后,弯曲关节向装有板弹簧一侧弯曲,拇指关节夹持力较大,可协同其他四指关节完成对目标物体的抓取.
机械手其余四指由单驱单向弯曲关节构成(图2).单驱动单向弯曲关节驱动原理与双驱动单向弯曲关节相同,结构上采用单气囊驱动结构,驱动力和结构本体较双驱动单向弯曲关节小.在抓取过程中,四指共同作用,每根手指需要的抓取力较小,且体积不能太大,故采取单驱动单向弯曲关节构成.

(a)四指结构三维模型

(b)四指实物图图2 四指结构
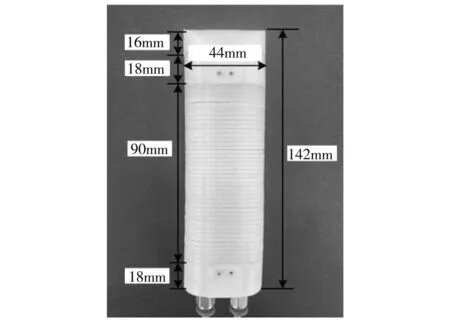
1.2 气动柔性机械手基本尺寸与结构功能
气动柔性五指机械手采用两种单向弯曲关节,共5个柔性关节组成(图3),即有5个自由度.机械手整体尺寸为260 mm*180 mm*180 mm(长*宽*高),约为成年人手的1.5倍.大拇指与手掌平面成空间75°,其余四指均与手掌处于同一平面,相邻两手指成15°夹角,中指与大拇指在同一直线上.机械手手掌、关节约束环、端盖、指尖材料均由3D打印技术加工,材料为强度较高的ABS工程塑料,人工肌肉气囊材料为硅胶管,人工肌肉密封件材料为6061铝合金,弹性钢板为SK5碳素工具钢,其余外形尺寸如表1所示.

(a)机械手结构示意图

(b)机械手实物图图3 气动柔性五指机械手结构
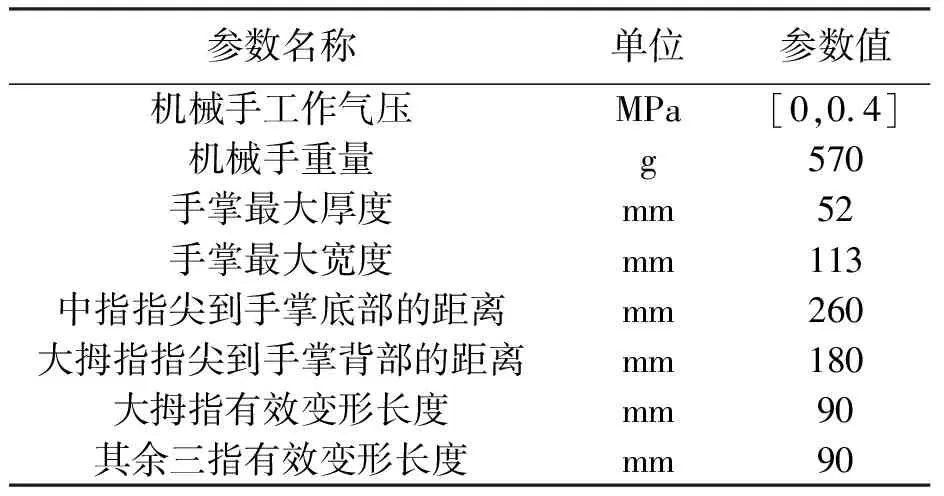
表1 五指机械手本体基本参数
从人体结构仿生学角度出发,设计的具有人手结构外形的气动柔性关节手指和机械手手掌,并具备人手的功能特点.通过控制通入人工肌肉压缩气体的压力值,达到控制机械手各手指运动姿态,各手指密切配合可对生活中常见的各种形状物体进行抓取,下文通过运动空间实验和抓取实验验证机械手运动性能.
2 气动柔性五指机械手运动空间实验
2.1 实验目的
在柔性机械手安装标记点,使用3D运动捕捉系统记录各手指空载时的运动轨迹,利用软件MATLAB对实验数据进行运动学分析,确定机械手五指运动空间.
2.2 实验过程
机械手运动空间实验原理如图4所示.
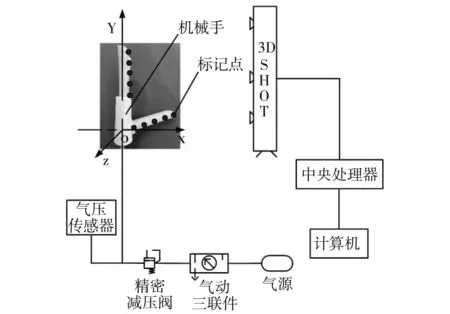
图4 运动学实验原理
实验系统(图5)主要由气源、计算机、3D shot视觉传感器、中央处理器、机械手本体和标记点几部分组成.柔性机械手固定于工作台上,标记坐标原点后,设置采样频率,分别取5个标记点按等间距安置于大拇指和其余四指上,通入压缩气体后,手指关节开始运动,利用3D运动捕捉系统(NDI)采集各标记点坐标随气压值变化的运动情况.

图5 运动学实验系统
采集数据后利用MATLAB软件实现数据处理,可得到手指在不同气压下的运动轨迹和整体机械手的运动空间,图6为机械手大拇指和中运动轨迹.从图中可以看出,各手指在xy平面内弯曲变形,随着通入压缩气体气压值增大,各手指弯曲幅度逐渐增大,在相同气压下,各手指弯曲变形一致性较好.
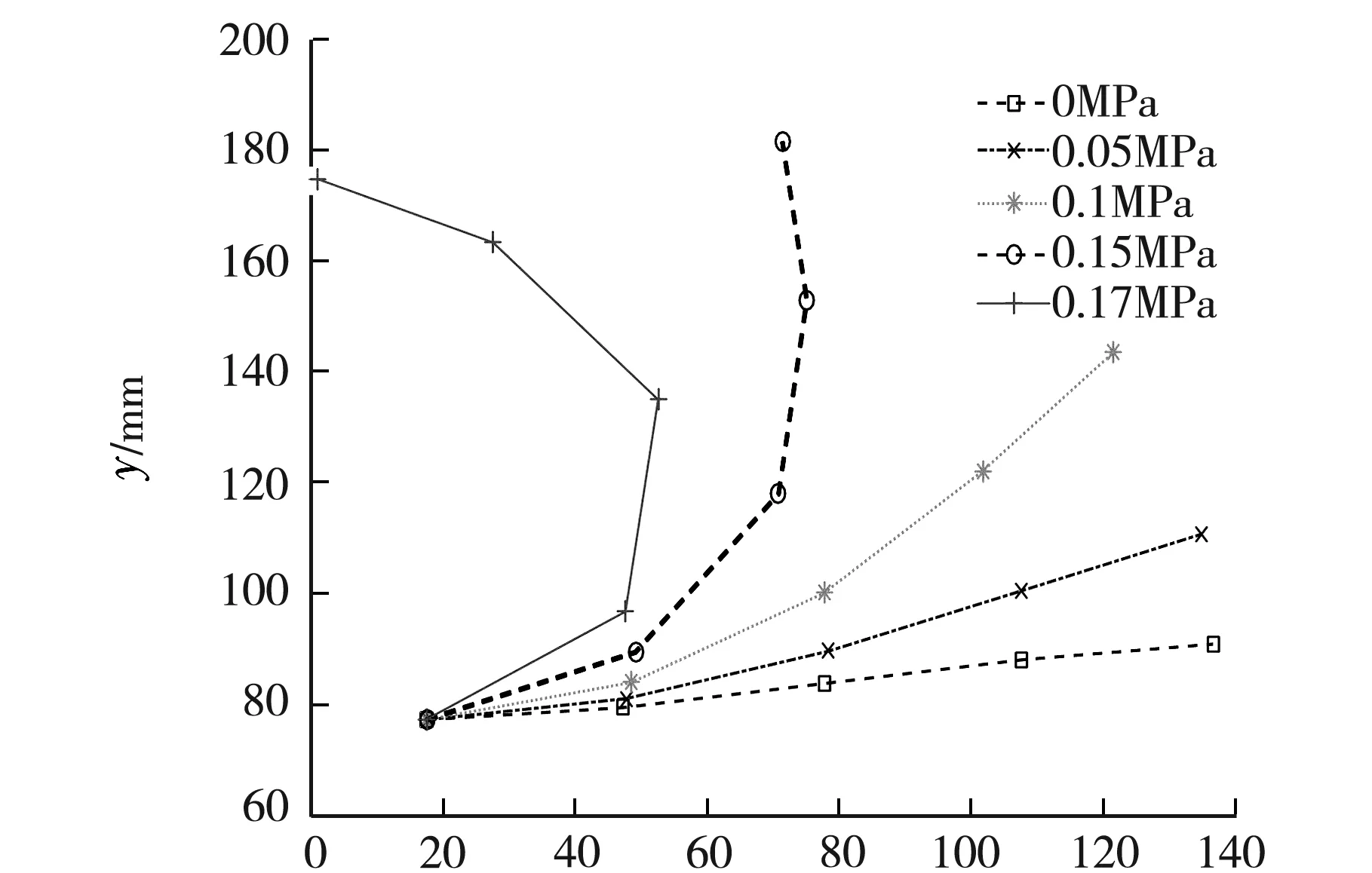
x/mm(a)大拇指关节单独运动

x/mm(b)中指关节单独运动
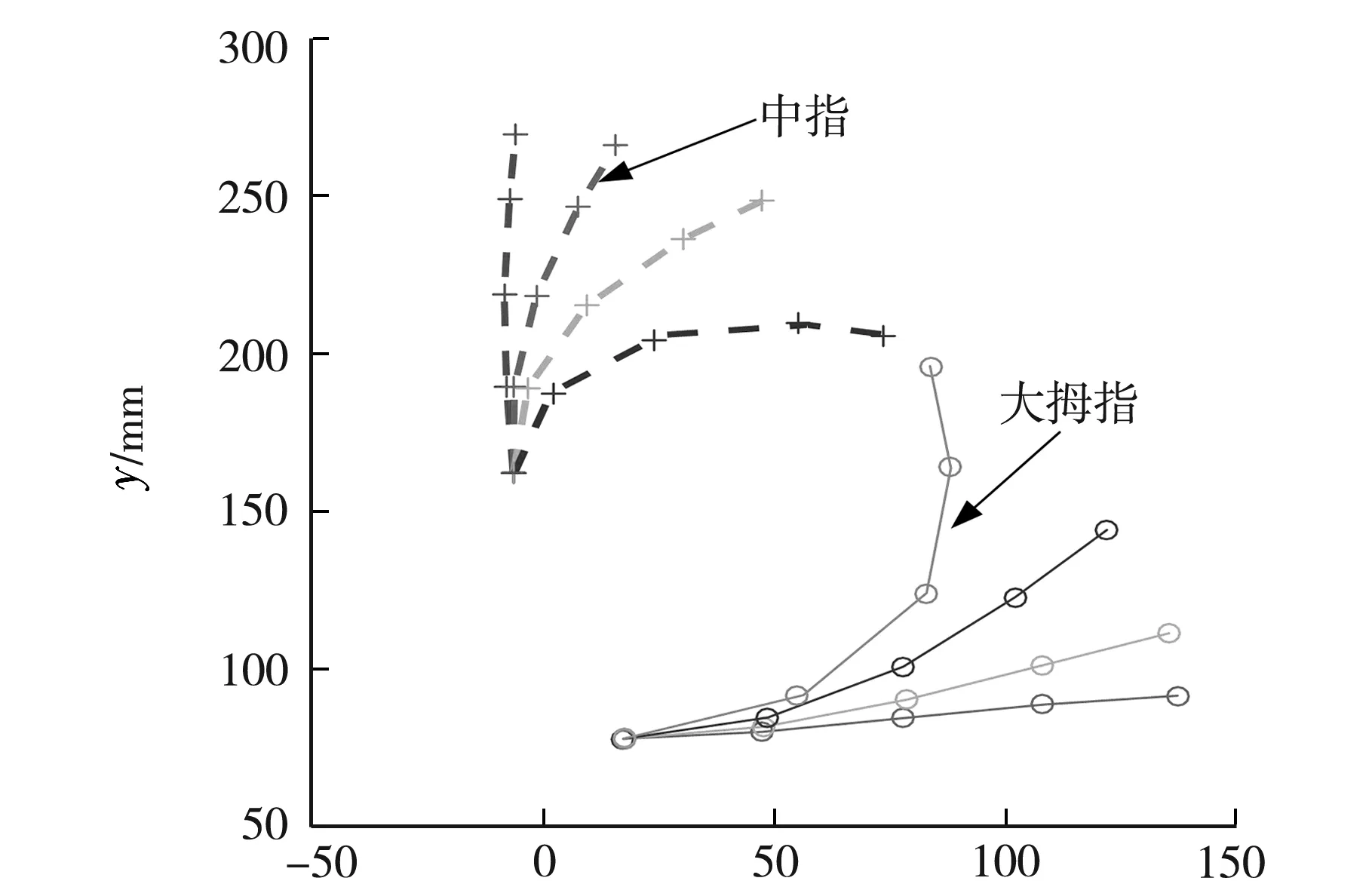
x/mm(c)中指与大拇指“捏”动作图6 机械手手指运动轨迹
柔性机械手大拇指与中指完成“捏”动作时的运动轨迹如图6(c)所示,两手指从初始状态开始通入压缩气体,当大拇指关节气压为0.14 MPa、中指关节气压值为0.13 MPa时,两手指关节指尖接触,可完成两指捏取物体的动作.
气动柔性五指机械手运动空间为图7所示,从图7可以看出,通入压缩气体后,大拇指关节、中指关节和食指关节运动轨迹有重叠交叉部分,说明大拇指和中指可完成两指“捏”的动作,大拇指、食指和中指可完成三指“抓”的动作.

x/mm图7 五指机械手工作运动空间
3 气动柔性关节五指机械手抓取实验
为验证机械手的抓取能力进行了五指机械手的抓取实验,选用了日常生活中常见的物品(表2)进行抓取.根据物体自身外形和质量,常用抓取模式分为五指抓取、三指抓取以及两指捏取.

表2 机械手抓取物品参数
3.1 柔性机械手五指抓取
柔性机械手五指抓取和握取是抓取体积和重量较大物体的常见方式.以接触方式可分为点接触和面接触,握取大直径圆柱体(图8)时多为面接触,通过大拇指指尖和手指弯曲成的包络面握取;抓取不规则物体(图9)时,通过手指指尖接触物体表面,不同接触位置外形会出现不同的接触方式,均能稳定抓取物体,体现了机械手较好的柔顺性和自适应性.

(a)五指握取奶粉罐(正面)

(b)五指握取奶粉罐(背面)图8 握取大直径圆柱体

(a)五指握取笔筒(正面)

(b)五指握取笔筒(背面)

(c)五指握取香蕉图9 握取不规则物体
如图10(a)所示,气动柔性机械手五指抓取体积较大球体时,先向大拇指通入压缩气体,控制其向掌心弯曲,同时控制其余四指与球体接触,准确协调五指弯曲,实现机械手对类似排球等较大球体的抓取.如苹果、橙子等体积较小球形物体,从图10(b)可以看出,通过大拇指、食指、中指和无名指接触物体并完成抓取动作,而小拇指从物体下方起支撑作用,物体不易脱落,有效完成抓取动作.

(a)五指抓取排球
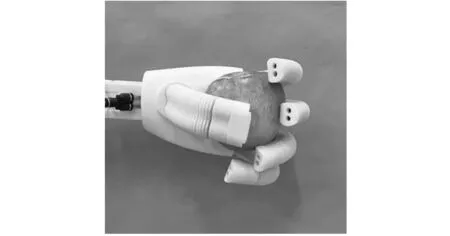
(b)五指抓取苹果图10 五指抓取球体、三角块
柔性机械手的抓取重量是衡量机械手抓取能力的重要指标,也对机械手整体结构的稳定性有更高的要求.为提高机械手的抓取重量,需提高通入压缩气体气压值,增大手指夹持力;指尖部位置有摩擦垫,增大指尖与物体表面的摩擦,实现对物体的抓取.提取和抓取是人类手拿取物体两种常见方式,如图11所示.

(a)提取编织篮

(b)握取大瓶饮料 图11 五指提取、握取重物
从图11(a)中可以看出,提取编织篮时,大拇指与其余四指弯曲形成了闭合的包络面,可实现对1.5 kg重物的提取动作.采用五指抓握,将类箱体形状的大瓶饮料包裹,如图11(b)所示,机械手可根据目标物体外形尺寸和质量的不同,调整手指夹持力,实现稳定抓取.本次实验中,五指机械手抓取重物能力最大可达2 kg.
3.2 柔性机械手三指抓取和两指捏取
柔性机械手对外形尺寸较小、质量较小目标物体的抓取方式多为三指抓取和两指捏取(图12).从图12可以看出,机械手可根据外形结构特点采用不同抓取方式,三指抓取时,见图12(a)~(b),大拇指、食指和中指协调配合弯曲接触物体,施力抓取物体.两指捏取方式可用于抓取直径和质量都较小的圆柱体,控制大拇指弯曲与中指相配合实现捏取,如图12(c)~(d)所示.

(a)三指抓取木块
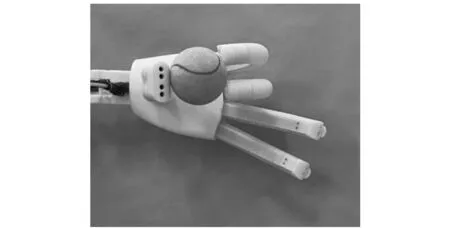
(b)三指抓取网球
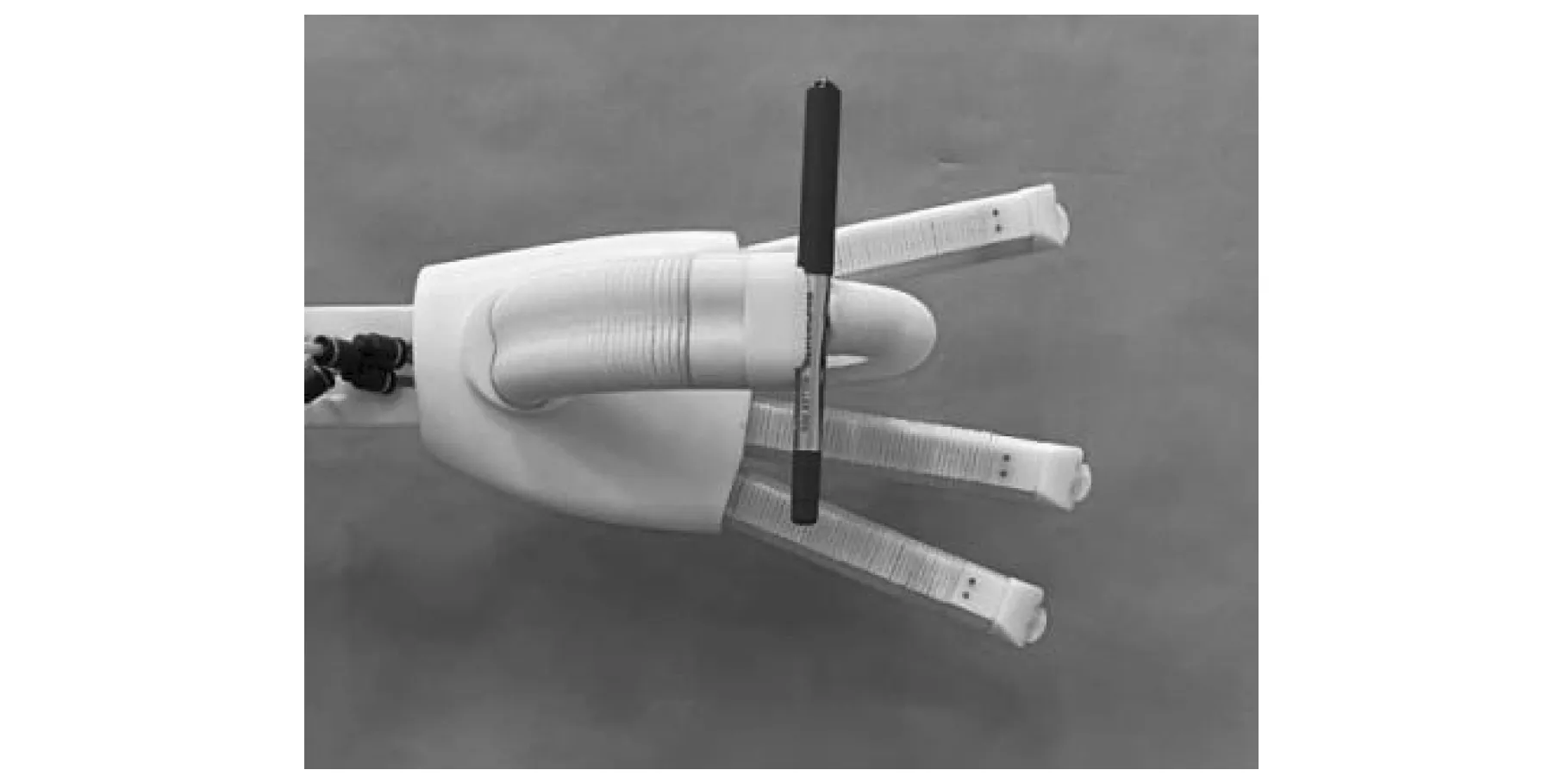
(c)两指捏取签字笔
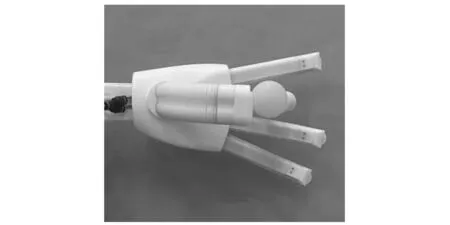
(d)两指捏取乒乓球图12 多指抓取、捏取物体
通过柔性关节五指机械手的抓取实验,验证了机械手具有类似人手的抓取功能,能够对生活中常见的各种形状的物体进行抓取,具有良好的柔顺性和适应性.
4 结 论
(1)基于多驱动单向弯曲关节,设计了一种气动柔性五指机械手,并制作了样机.
(2)利用3D捕捉系统对机械手进行了运动学实验研究,处理数据得到了其运动空间,机械手各手指较好地完成了设计要求,实现各自抓取功能.
(3)通过机械手抓取实验,分析了3种抓取模式,验证了机械手具有类似人手的抓取功能,能够对生活中常见各种形状的物体进行抓取,具有良好的柔顺性和适应性.
猜你喜欢
作文周刊·小学一年级版(2024年16期)2024-05-30 14:52:47
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
纺织科学研究(2021年6期)2021-12-02 20:32:56
数学小灵通(1-2年级)(2021年9期)2021-10-12 05:37:08
装备制造技术(2020年9期)2021-01-26 00:15:08
小学生优秀作文(低年级)(2019年5期)2019-04-25 13:13:18
作文评点报·低幼版(2019年8期)2019-02-18 01:24:28
奥秘(2016年4期)2016-04-21 17:31:28
通信电源技术(2016年1期)2016-04-16 04:57:29
新闻前哨(2015年2期)2015-03-11 19:29:30