
一种适用于电控的驻车机构的设计思路及性能分析
2021-08-31 07:24:58叶光海
汽车零部件 2021年8期
叶光海
(赣州经纬科技股份有限公司,江西赣州 341000)
0 引言
驻车机构是自动变速器中常用的防止汽车滑行的停车安全装置,用于汽车长期无限时地停驻在一定位置甚至斜坡上。驻车机构一般采用结构简洁、工作可靠的纯机械式驱动机构来实现,以避免故障。随着近年来新能源汽车及电控技术的发展,越来越多的驻车机构经适当的优化设计应用于电动汽车的减(变)速器当中,用于辅助安全停驻车辆。
由于驻车机构在汽车使用过程中具有重要的作用甚至涉及整车的安全性,因此对于驻车机构的设计和性能分析就很有必要。目前应用于变速器的驻车机构大多采用机械结构手动操作模式,本文作者将以运用于某纯电动汽车减速器的适用于电机驱动换挡的驻车机构为例,对其设计思路及性能进行分析和研究,以提高其在变速器甚至整车应用中的安全性。
1 驻车机构的设计思路
驻车机构最终的使用效果是在整车上体现的,所以设计之前需与所匹配车型客户技术人员进行充分沟通并收集相关的参数和要求。需要了解整车的相关参数及使用工况,如:整车质量、重心位置,驻车的坡度、轴距、轮胎规格、路面附着系数等与驻车功能相关的参数和数模。然后对收集的数据进行分析与研究并展开设计。
根据汽车驻车制动性能要求,驻车机构的驻车效能以汽车在良好路面上能可靠而无时间限制地停驻最大坡度来衡量。轿车等乘用车驻车坡度一般要求为20%~30%,所以驻车机构展开设计前,需对整车爬坡度所对应的坡度角进行计算分析和研究[1]。
汽车在坡道上驻停时的受力情况如图1所示。

图1 汽车斜坡驻车受力示意
驻车所需的地面制动力为:
FL=magsinα
(1)
汽车可能停驻的极限上坡路倾角为α1,可根据后桥上的附着力与制动力相等的条件求得:
(2)
式中:α1是保证汽车上坡行驶时纵向稳定性的极限坡路倾角。
同理,可以推导出汽车可能停驻的极限下坡路倾角为:
(3)
式中:FL为驻车所需的制动力;
ma为汽车最大总质量;
g为重力加速度;
α为法规坡度角;
α1为汽车极限上坡倾角;

L为汽车轴距;
L1为汽车质心到前轮平行轴距距离;
L2为汽车质心到后轮平行轴距距离;
hg为汽车质心与地面的垂直距离;
φ为地面附着系数,一般取0.7[1]。
2 驻车机构的结构分析
某纯电动汽车减速器驻车机构根据匹配和布置空间要求,设计基本结构如图2所示。

图2 驻车机构基本结构
其中驻车齿轮、驻车棘爪、驻车凸轮、回位销、销轴、转轴、扭转回位弹簧、弹性定位座是本驻车机构的实现整车相关功能的关键零件;扇形涡轮及蜗杆用于外接电机的驱动本驻车机构换挡,取代了手动摇臂换挡;利用蜗杆涡轮副大传动比的特点,可以使机构设计更加紧凑,选用功率或结构更小的电机来实现整车的电控P挡。
3 驻车机构的性能分析
驻车机构为满足整车使用需要实现以下功能[1]:(1)汽车在不大于5 km/h时车速行驶时,要能够实现安全驻车;(2)当汽车实现驻车后,包括在斜坡路面上驻车机构不能自动脱挡;(3)当汽车需行驶时,驻车机构应能顺利解锁,使汽车脱离驻车P挡;(4)当汽车处于非驻车工况下,发生任何异常,驻车机构不能自动驻车。
3.1 安全驻车性能
在车速不大于5 km/h时,驻车机构要能实现全驻车,此时车轮旋转角速度为
(4)
式中:v为车速,r为轮胎半径[1]。
如图3所示,驻车棘爪和驻车齿轮齿顶相碰的工况,此时驻车棘爪旋转角度为αjz,驻车齿轮旋转角度为αzc,驻车凸轮旋转角度为αzt。

图3 驻车锁止驻车棘爪未完成入驻受力示意
在啮合运动的过程中驻车棘爪的受力方程如下[2]
(5)
式中:Fzt为驻车凸轮作于到棘爪上的力;
Rjz为Fzt相对棘爪转轴的力臂;


(6)

Thw为扭转回位弹簧扭力矩;
Ftz为弹性定位座对扇形涡轮的作用力;
Rtz为Ftz作用于扇形涡轮转轴力臂;
Twl为蜗杆输入扭矩为Twg时输出给扇形涡轮的扭矩,可通过以下公式计算:
Twl=iwTwg
(7)
式中:iw为蜗轮涡杆副传动比。
当Twg完成挂P挡输入扭矩零时,即Twl=0,则受力平衡方程为:
(8)
此时,满足式(8)中的弹性定位座弹力可以确保驻车机构实现安全驻车。
3.2 防自动脱挡性能
驻车机构P挡锁止工作时,驻车棘爪所受力Fzc基本上由销轴(分力Fzc2)与转轴(分力Fzc1)所承受,如图4所示,为了确保防止自动脱挡,弹性定位座在P挡工作位置,可进一步防止本机构自动脱挡。
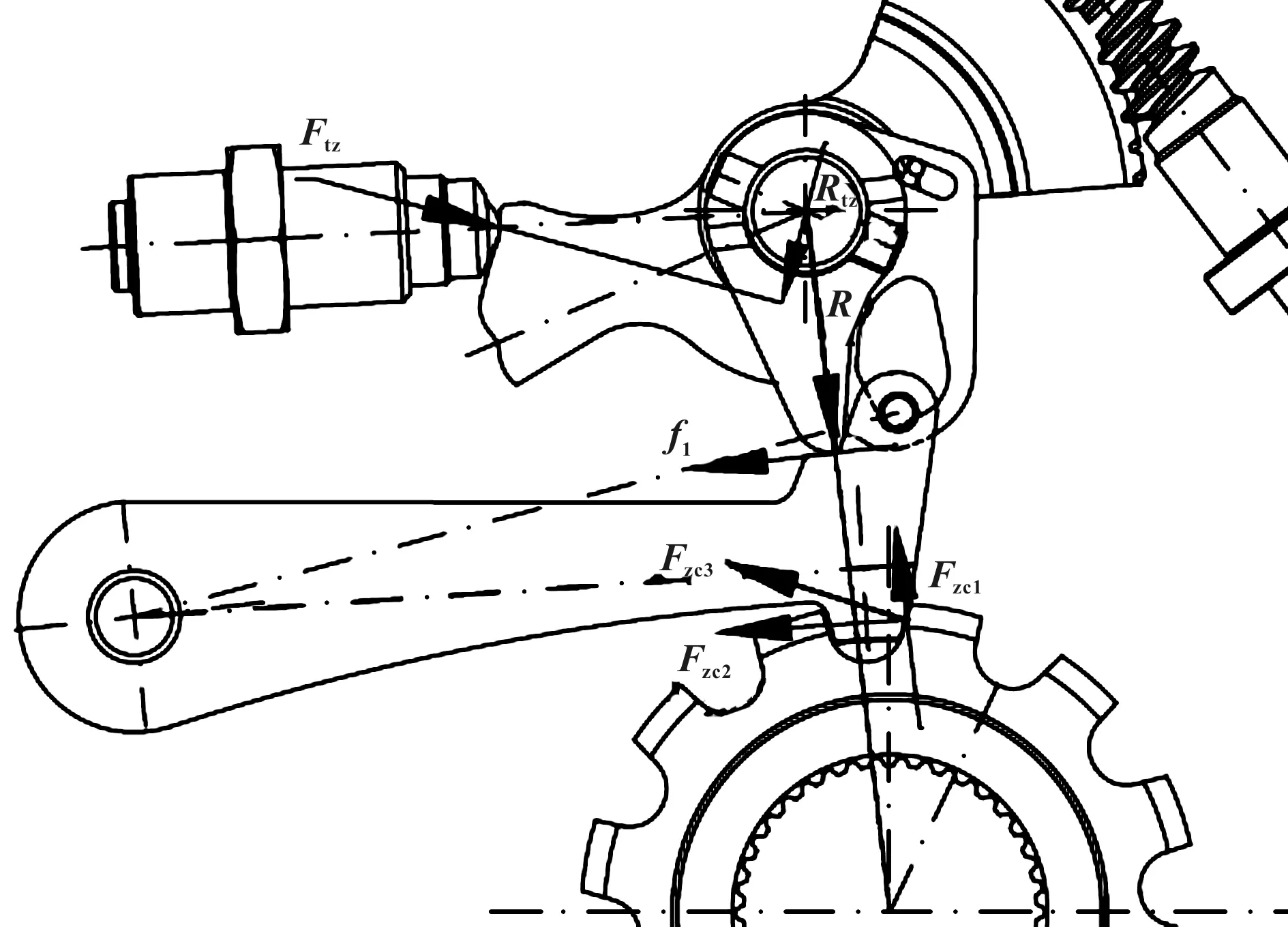
图4 驻车机构锁止工况受力示意
根据力平衡方程可得
FtzRtz≥f1R
(9)
式中:f1为驻车棘爪与驻车凸轮存在脱挡倾向时的摩擦力,可由下式计算得[3]
f1=μFzc1
(10)
式中:μ为驻车棘爪与驻车凸轮接触面摩擦因数;
R为f1对驻车凸轮转轴的力臂。
将式(10)代入(9)可得
FtzRtz≥μFzc1R
(11)
驻车机构P挡锁止工作时,弹性定位座弹力须满足式(11),则可防止本驻车机构在P挡时自动脱挡。另外本机构还可考虑利用涡轮蜗杆的自锁性能来实现P挡自锁,文中不在此详述。
3.3 防止异常驻车性能
图5为驻车机构非驻车工况状态图。

图5 驻车机构非工作工况受力示意
驻车棘爪通过回位销与驻车凸轮连接,根据变速器使用工况,选取安全系数为n,驻车机构此状态的力矩平衡方程[2]为:
FtzR1-nGjzR2=0
(12)
式中:Gjz为驻车棘爪与回位销的重力;
R1为Ftz到驻车凸轮转轴中心力臂;
R2为Gjz到驻车棘爪销轴中心力臂。
当弹性定位座的作用力Ftz满足式(12)要求,则能防止驻车棘爪异常驻车。
3.4 驻车棘爪自动弹出能力
当汽车在坡道上驻车时,驻车齿轮轮齿的一侧与驻车棘爪嵌入齿的一侧接触并受载,驻车棘爪受力情况如图6所示,此时要启动汽车,确保P挡顺利解锁,驻车棘爪顺利弹出,须满足[3]:
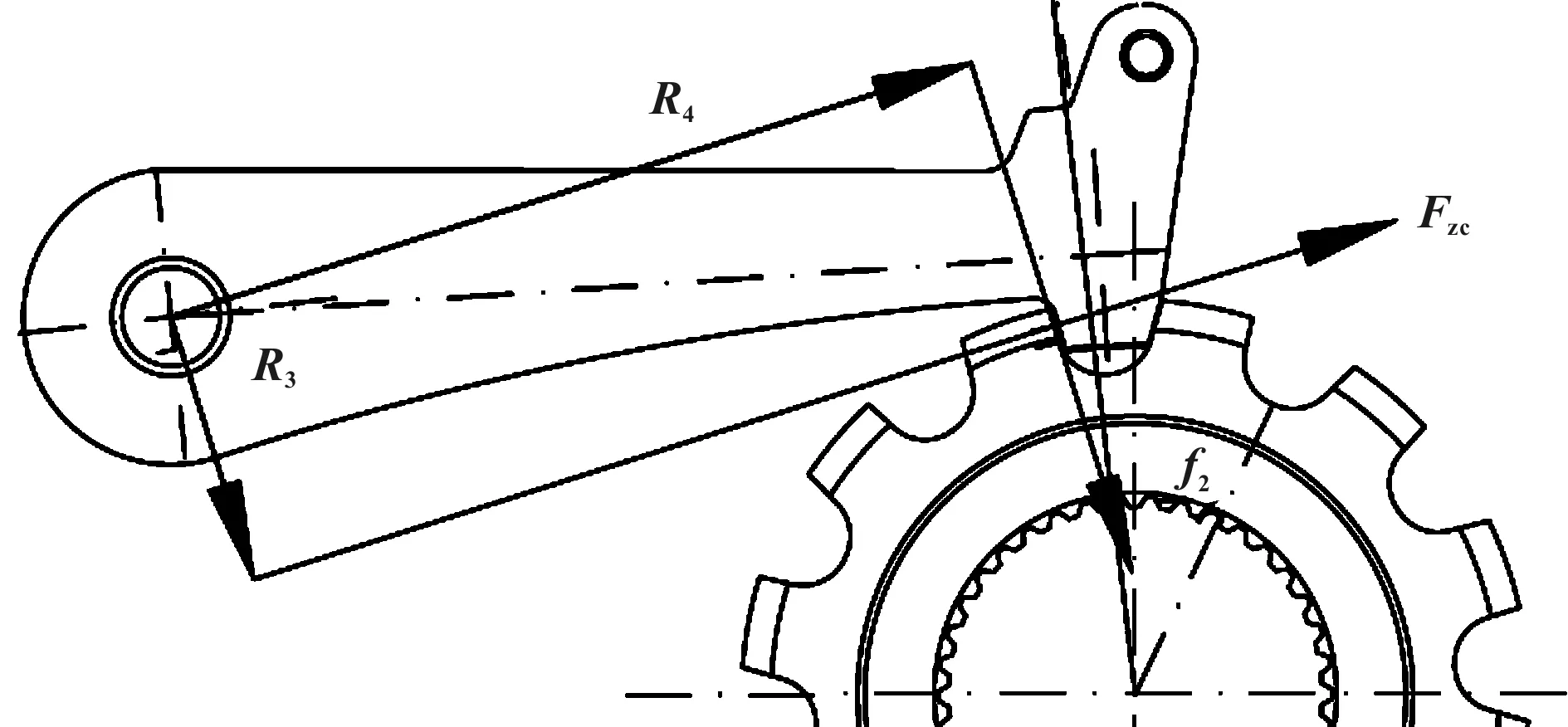
图6 驻车时驻车棘爪受载工况受力示意
FzcR3-f2R4≥0
(13)
式中:f2为驻车齿轮与驻车棘爪摩擦力;
R3和R4分别为各作用力对应的力臂。
3.5 驻车机构最大解锁扭矩校核
驻车机构从P挡解锁所需的扭矩Twg,主要取决于驻车棘爪与驻车凸轮间的受力以及弹性定位座的弹簧作用力,系统受力如图7所示。
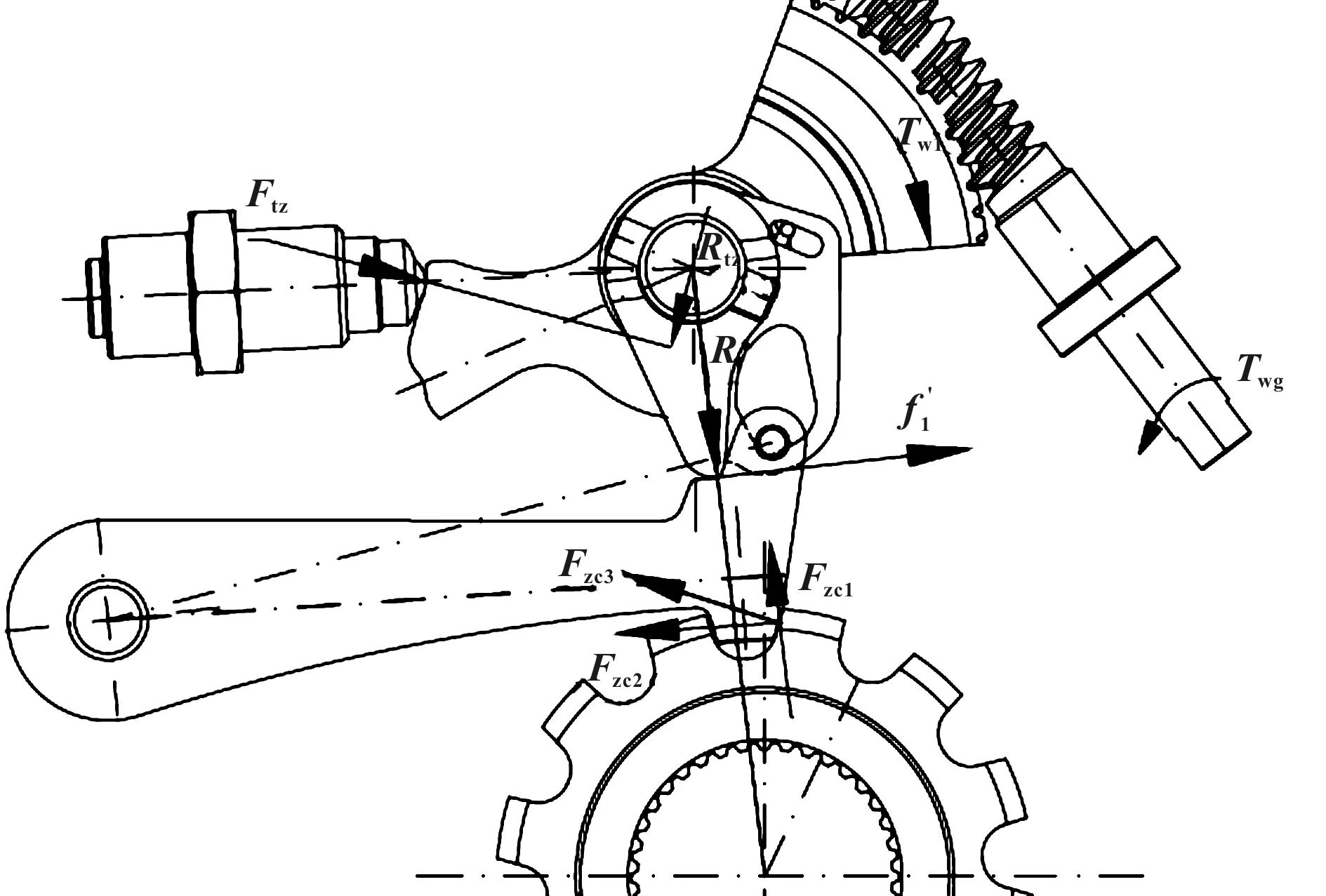
图7 驻车机构解锁工况受力示意
考虑是最大解锁扭矩,校核时须将驻车极限坡道角度的较大值工况纳入核算。经受力分析,可得出最大解锁扭矩的力矩平衡方程[2]为:
(14)

将式(7)和(10)代入式(14)并整理可得
(15)
式中:Twg为驻车机构的控制力矩,也是控制电机选型的依据之一,一般情况在30%坡度工况下,根据具体车型进行评价,乘用车控制在0.3~1 N·m较合理,电机较小,结构紧凑。
4 结论
驻车机构是关系整车安全的关键系统之一,要求结构简单可靠,但对其性能要求还是挺高的,且结构形式多样,设计约束条件较多,因此驻车机构的设计方案需要针对具体车辆及变速器的边界条件具体分析研究。
文中仅就驻车机构的设计思路及主要性能要求做了初步的分析和研究,还有一些细节和影响因素有待进一步的探讨。
猜你喜欢
中国机械工程(2023年17期)2023-09-19 06:46:22
航空发动机(2023年3期)2023-07-07 09:49:38
农业装备与车辆工程(2022年4期)2022-10-31 10:21:48
星星·散文诗(2022年34期)2022-09-03 09:23:43
汽车实用技术(2022年10期)2022-06-09 11:33:30
机械工程师(2021年12期)2021-12-22 06:38:02
航空发动机(2021年1期)2021-05-22 01:20:34
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
西藏科技(2016年10期)2016-09-26 09:02:12
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:38
