
风电叶片动态数据获取及运动分析
2021-08-26 10:55刘其林燕必希董明利
机械设计与制造 2021年8期
刘其林,燕必希,董明利,孙 鹏
(北京信息科技大学光电测试技术北京市重点实验室,北京100192)
1 引言
风电已经成为清洁能源重点发展的国家战略,国家在“十二五”和“十三五”发展规划中均明确提出将风电作为国家重点发展产业,近几年国内风力发电机装机量大幅上升[1-4]。
叶片作为风机关键部件,其动力学性能对于风机效率和寿命至关重要。叶片几何形状非线性,结构刚度较低,气动载荷作用下易产生振动和变形。叶片振动分为垂直于旋转平面的挥舞振动、在旋转平面内的摆振振动及自身的扭转振动,共同作用下风力发电机会有共振风险[5-7]。于是在时间域解算风机系统的振型、特征频率和阻尼成为风机叶片模态分析的重要一步[8]。而获得风力发电机叶片上关键点的运动数据是模态分析的数据基础。
由于叶片尺寸大、测量环境复杂、被测物处于转动状态,获得叶片上关键点的运动数据成为难题之一。目前国外已经展开基于动态摄影测量的运行状态下风力发电机叶片动态数据获取的研究,以Gom公司为代表的技术团队已将动态摄影测量技术应用于大型风电叶片的测量项目中,在220m测量距离下,测量精度可达±25mm,但目前所用测量方案仍需搭建标定墙以辅助相机进行现场标定。由于被测物尺寸巨大,标定墙的搭建成本高昂且费时,在兆瓦级风力发电机测量中十分不便[9-11]。国内基本停留在测量非运行状态叶片载荷形变阶段,以文献[12-14]为代表的科研团队已将摄影测量技术应用于测量非运行状态风力发电机叶片在人工静、动载荷下的目标点运动数据测量,但尚未针对运行状态下风力发电机叶片的测量进行研究。
针对上述问题,提出将动态摄影测量技术应用于风电叶片动态数据获取及运动分析,用风机自身取代标定墙,获得叶片动态数据,实现叶片速度和加速度分析,为后续叶片模态分析奠定基础。
2 测量方法
对预先贴定的标记点进行拍照测量,灰度重心法提取点坐标后进行统一畸变矫正。计算图像之间的单应矩阵映射关系从而完成同时刻左右相机、不同时刻同一相机图像的标志点匹配跟踪。利用匹配后的点对进行全局定向,在相机室内、室外分步完成相机内、外参数标定基础上,使用基于五点法相对定向理论完成相机定向[15]。五点法相对定向中,本质矩阵E仅有5个自由度,具有更少的退化模型,针对近平面的测量场景可精确计算,适用于风力发电机叶片动态摄影测量[16]。
利用全局定向所求本质矩阵E、旋转矩阵R及平移矩阵T进行三维重建。以风力立柱上的标志点作为摄影比例尺数据来源,使用V-star摄影测量系统对立柱标志点预先测量并与系统所测值计算比例系数进而还原三维重建点云坐标。然后在最小二乘法拟合叶片旋转平面并旋转点云坐标系至Z轴垂直于旋转平面的基础上进行标记点在X,Y,Z三个方向上的运动分解,其中X,Y为面内运动数据,Z为面外运动数据。至此可得风力发电机叶片工作期间,其上标志点在三维空间中面内运动X、Y方向及面外运动Z方向的位移数据,以图表形式展示数据统计处理结果并根据模态数据分析需求进一步计算标记点各个时刻的速度、加速度信息。测量模型,如图1所示。
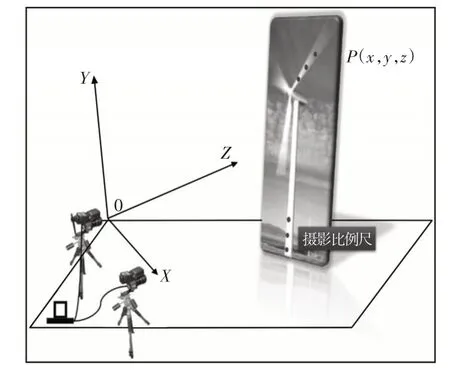
图1 风电叶片动态摄影测量模型Fig.1 Dynamic Photogrammetric Model of Wind Turbine Blades
详细步骤如下:(1)在风电叶片表面叶尖与叶根之间均匀粘贴回光反射标志点,并在合适位置粘贴回光反射编码点,编码点数量不少于4个。其中风机立柱需粘贴回光反射标志点至少两个以提供摄影比例尺数据来源;(2)采用双相机站位,两相机夹角在(30~60)°之间;(3)使用系统搭配的闪光灯,将相机输入端与USB数据采集卡连接以进行同步曝光与拍照,相机网线与笔记本电脑连接进行图像传输;(4)拍照,使用灰度重心法提取图像中标志点中心的相面坐标;(5)利用预先设置好的编码点进行初步五点法相对定向并三维重建;(6)在灰度重心法提取出全部图片的标志点相面坐标后,通过单应性矩阵将每个时刻左右相机相面标志点的相面坐标进行匹配,得到全局匹配点对并带入相对定向算法,完成全局定向,所得本质矩阵E、旋转矩阵R及平移矩阵T即为全局定向结果;(7)每组照片以此为基础进行三维重建,在以左相机为基准的坐标系下重建点云图像;(8)通过最小二乘法拟合点云平面,即风力发电机叶片旋转平面。旋转点云坐标系使其Z轴与拟合平面垂直;(9)将左相机测量周期内所拍照片与第一时刻照片进行单应性矩阵匹配,统一左相机全局点编号。将左相机统一编号后的点与右相机测量周期内的对应匹配点进行编号统一,进而将点编号传递给三维重建出的三维点坐标矩阵,实现全场点、测量周期内的三维坐标跟踪。(10)输出叶片上某特定标志点在全部时刻下,于X、Y、Z三个方向的位移、速度、加速度信息,作为叶片结构的响应信号,为后续的风机叶片动态模态参数识别提供数据基础。
风电叶片动态数据获取及运动分析程序框图,如图2所示。

图2 风电叶片动态数据获取及运动分析程序框图程序框图Fig.2 Program Block Diagram for Dynamic Data Acquisition and Motion Analysis of Wind Turbine Blades
3 实验结果及分析
为验证测量方法在实际测量中的精度和可靠性,选取如图4所示小型风力发电机为检测对象,叶片旋转直径1m,旋转中心距地面高度1.5m,立柱直径32mm,测量距离1.5m。为保证测量过程中标志点回光质量稳定,将风力发电机调整叶片迎风面的旋转自由度锁死。在3个叶片上分别从叶根至叶尖均匀粘贴标志点与编码点,其中标志点39个,编码点9个。相机型号为PROGISE GE90000,镜头焦距20mm,图像传感器为35毫米光学格式的ON半导体KAI-16000CCD,此相机具有160万像素的分辨率,全分辨率下采样速率为每秒3帧。相机横向视场角84°,纵向视场角62°,在距离被测物(1~60)m的范围内可得到良好对焦的图像。实验测量距离为1.5m,测量时相机站位夹角45°。使用V-star摄影测量系统测量风机立柱点间距为系统提供摄影比例尺以及测量各点三维坐标以提供数据误差对比。以风力发电机旋转一周期为采样周期进行拍摄,共拍摄60张照片,30个时刻。实验现场,如图3所示。左右相机在该实验条件下所拍摄的画面,如图4(a)、图4(b)所示。

图3 实验现场Fig.3 Experimental Site
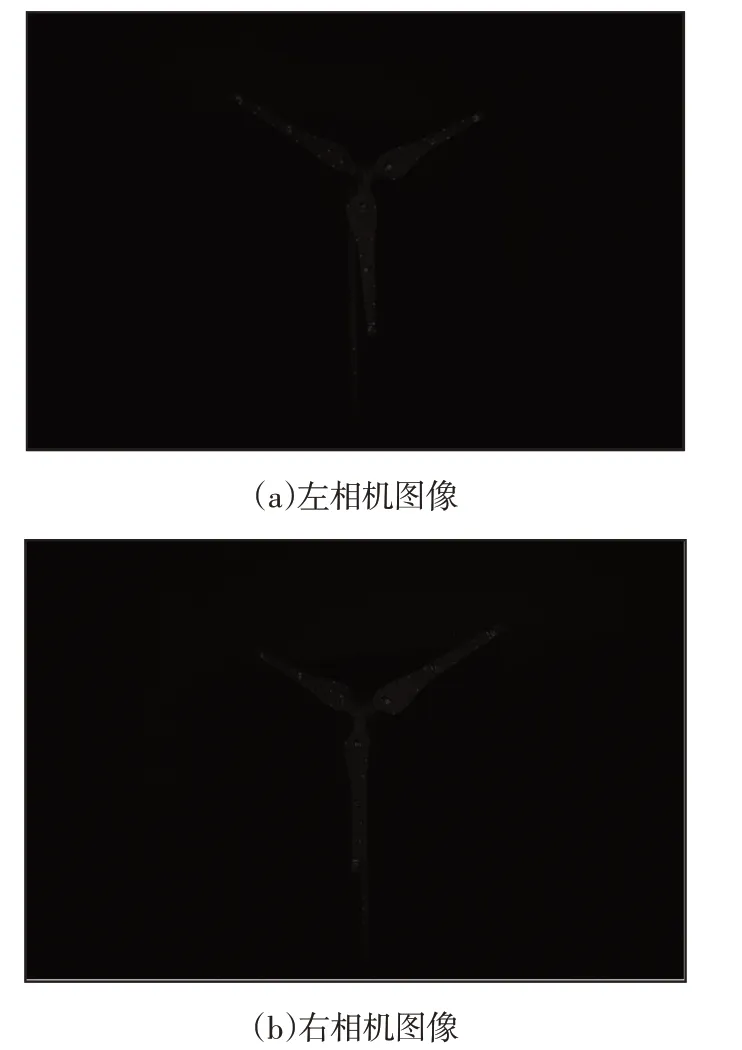
图4 左右相机图像Fig.4 Left and Right Camera Image
完成定向及三维重建后,重建空间点所在的坐标系是以左相机光心光轴为基准建立的。进一步依据摄影比例尺对点云进行数据还原。由于风机运行过程中,风机立柱底部与叶根部位较风机立柱上部与叶尖部位更不易发生非刚性形变,实验选用风机立柱底端标志点作为摄影比例尺数据来源,选择其中两点,如图5所示。
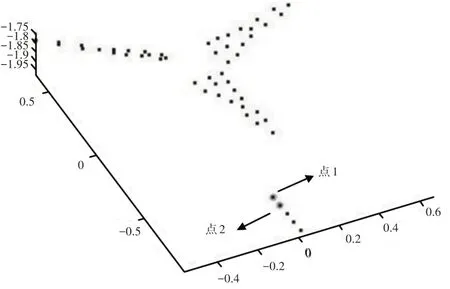
图5 摄影比例尺选点Fig.5 Points Selected for Photographic Scale
将测量所得测量周期内两点距离均值d t与V-Star系统测量所得距离数值d v进行比例计算,其中d t=0.064,d v=44.400,摄影比例尺比例系数k=698.138。将三维重建所得全局点坐标按照比例系数k进行放大,还原重建点云的真实尺寸,如图6所示。

图6 比例还原后测量周期内叶片标记点点云图像Fig.6 Point Cloud Image of Wind Turbine Blade Maker in Measuring Period after Proportional Restoration
为进一步分解标记点面内、面外运动数据,需对标记点点云图像进行旋转平面拟合并旋转点云所在坐标系使其Z轴垂直于拟合旋转平面。令拟合旋转平面为P,点(x,y,z)到平面A X+B Y+C Z+D=0的距离为:

ABCD四个变量只有三个是互相独立的。

由式(2)可将式(1)化简为:

现在有已知点序列x,y,z,求参数a、b、c。
构造函数f(p),输入参数为p,其中:p(1)=a,p(2)=b,p(3)=c
使用Matlab中Lsqnonlin函数求得p,使得拟合精度为11.548mm。
拟合旋转平面后,对于存在任意旋转变换的两个空间坐标系O-X Y Z和O′-X′Y′Z′,可通过依次绕三个坐标轴旋转一定角度实现两坐标系对应坐标轴的重合。设坐标系O-XYZ依次绕自身X轴、Y轴、Z轴分别逆时针转θ1,θ2,θ3后可以与坐标系O′-X′Y′Z′重合,则空间中某点M( )X,Y,Z在这两个坐标系中的描述关系如下:

坐标系旋转后,拟合旋转平面,如图7所示。完成测量周期内点匹配及编号统一后,即可确定任意点的运动数据,如图8所示。

图7 拟合旋转平面Fig.7 Fitting Rotating Plane

图8 统一标记点编号Fig.8 Uniform Marking Point Number
由于数据量庞大,此处以输入43、44号点为例进行结果展示。全局共30个时刻,两两时刻间隔0.3s,可跟踪显示并分解43、44号点在整个测量时段内,在拟合旋转平面内X、Y方向的位移及垂直于拟合旋转平面外Z方向的位移信息,如图9所示。

图9 测量周期内点43、44在X、Y、Z方向的位移数据Fig.9 Displacement Data of Points 43 and 44 in X,Y and Z Directions in Measuring Period
跟踪获取点3个方向的位移信息后,需对测量系统进行精度评估。由于运行中风电叶片本身长度几乎不发生离心方向的延展,可利用叶片轴向近叶根部位标志点之间的空间距离作为精度评价的数据来源,如图10所示。

图10 精度评估选点Fig.10 Selected Points for Accuracy Assessment
为验证重复性精度,将其中两点每个时刻的实际测量距离与全部时刻测量距离的平均值作差,并计算测量时间内的标准差。结果如表1所示。在测量周期内,风电叶片点空间距离的标准差在(0.021~0.637)之间波动,系统内部测量稳定性良好。
为验证系统绝对精度,采用V-star动态摄影测量系统对被测物精度评估点坐标进行测量并计算两点距离,与系统测量所得每个时刻下对应点之间的距离做差,计算差值平均值为再现性误差。结果,如表1所示。在测量周期内,风电叶片点空间距离再现性误差均值在(-0.705~0.243)mm之间波动,相比V-Star系统误差扩大10倍,满足风力发电机测量需求。

表1多点对的重复性误差、标准差及再现性误差Tab.1 Repeatability Error,Standard Deviation and Reproducibility Error of Multipoint Pairs
完成精度评估后,进一步根据相机拍摄时间间隔将位移信息处理为速度及加速度信息,此处以43号点为例,如图11、图12所示。

图11 测量周期内点43在X、Y、Z方向的速度数据Fig.11 Velocity Data of Point 43 in X,Y and Z Directions in Measuring Period

图12 测量周期内点43在X、Y、Z方向的加速度数据Fig.12 Acceleration Data of Point 43 in X,Y and Z Directions in Measuring Period
分别显示了在测量周期内点43沿X、Y、Z三个方向的速度及加速度信息以满足风机叶片动态模态参数识别数据需求。
在固定时间间隔采样的基础上,可以通过标记点在3个方向上的位移数据计算每个点、每个时刻在3个方向上的速度、加速度信息,进而提供模态分析所需标记点时域上的运动数据。
4 结论
通过摄影测量方法完成风力发电机叶片动态分析及数据获取,在结合风力发电机特殊运动形式及测量条件基础上,研究了双目摄影测量系统在风电叶片测量中的定向、匹配、运动数据分解及精度评价方法。
在实际测量条件下,通过五点法相对定向求解相机外参数,计算单应性矩阵以匹配同、异时刻图像及追踪目标点运动数据,结合风电叶片运动特性及风电叶片模态分析数据需求提出目标点运动数据分解及有效的重复性、再现性精度评价方法,进一步生成点测量周期内各方向的速度、加速度信息以满足模态分析的数据形式。实验结果表明,测量运行中风电叶片点对空间距离的标准差小且多对点之间标准差波动较小,测量系统稳定性良好。与V-Star系统测量值对比,测量值差值较小,在实地测量中,测量距离在100m时,理论精度可达5cm,满足实际测量需求及风电叶片模态分析数据要求。该研究可为大型风力发电机叶片的动态数据获取及运动分析提供指导。
猜你喜欢
北京测绘(2022年5期)2022-08-01
防爆电机(2022年1期)2022-02-16
测控技术(2018年12期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
山东工业技术(2016年15期)2016-12-01
风能(2016年12期)2016-02-25
少年科学(2014年2期)2014-02-24
