
基于塔架智能主动调载技术的施工计算方法与应用
2021-08-20 09:13:12邓年春程华强罗小斌周大为
桂林理工大学学报 2021年2期
潘 栋, 邓年春, 程华强, 罗小斌, 周大为
(1.广西大学 a.土木建筑工程学院; b.广西特殊地质公路安全工程技术研究中心; c.广西大跨度拱桥工程技术中心,南宁 530004; 2.广西交通工程检测有限公司, 南宁 530004; 3.广西路桥工程集团有限公司, 南宁 530004;4.武汉市市政建设集团有限公司, 武汉 430023)
近三十年来, 我国钢管混凝土拱桥经历了初步探索、 发展、 大规模应用的过程, 期间修建了近500座钢管混凝土拱桥, 其施工方法通过不断的探索与验证, 得到了发展和完善[1-4]。目前, 缆索吊装斜拉扣挂法应用与适应性最为广泛, 400 m及以上跨径钢管混凝土拱桥都采用该方法[4]。缆索吊装斜拉扣挂法的主要步骤为: 将拱肋分多节段制作, 通过缆索吊机吊起节段, 由拱脚向跨中逐段安装就位, 再通过斜拉扣索锚固在塔架上, 或者经扣塔上的转索鞍将扣索锚固在地锚, 直至跨中合龙。在整个施工过程中, 塔架会随着拱肋节段的起吊、 运输和悬拼过程产生较大的位移, 而拱肋在合龙松索前是依靠塔架的斜拉扣挂体系形成的大悬臂结构。 因此, 塔架的偏位必将会引起拱肋节段拼装精度, 甚至有可能影响安全。韦建刚等[5]发现当线形偏差的误差峰值取L/1 000时, 极限承载力降低可以达到10%以上; 康海贵等[6]发现拱轴线下降0.3 m时, CFST拱桥失效概率增大为设计轴线时的5.2倍; 吴欣荣[7]计算了多种线形偏差下CFST拱桥的稳定承载力, 发现面内稳定承载力降低显著。可见, 钢管混凝土拱肋拼装线形是否达到设计目标, 直接决定钢管混凝土拱桥性能能否满足设计与运营要求。同时, 刘书杰[8]指出拱肋悬拼线形在高程的偏差甚至达到塔架水平偏位的50%以上。因此, 有必要采用技术手段对CFST拱桥悬拼过程塔架的位移进行控制, 从而实现高精度拼装。
目前, 除马滩红水河特大桥[9]和平南三桥[10]外, 塔架偏位控制都是采用被动控制的方式, 即通过布置大量缆风, 然后进行一次张拉并结合塔架预偏的方式进行塔顶顺桥向偏位控制。但该方法普遍存在缆风用量大、 张力水平低的问题[11-12], 未能很好地利用索的抗拉强度, 通过增大缆风面积来实现塔顶相对偏位的控制, 在很大程度上造成浪费。为了更好地发挥缆风索的作用、 减小缆风的投入量,有必要进行缆风初张力拟定方法的研究, 并在此基础上结合新技术进行塔架偏位控制。 文献[13]提出利用GNSS高精度位移自动化监测系统和液压千斤顶控制系统主动适时地向塔顶缆风施力, 既能有效控制塔顶位移、 减少吊装过程的塔架对拱肋拼装的影响、 提高拱桁悬拼精度, 又能大幅减少缆风索的用量。该方法在马滩红水河特大桥上进行了初步试验并取得一定成效, 但其在缆风索的初张力拟定和主动控制索的张力计算上均未提出明确的方法。
本文基于“吊扣合一”式塔架塔顶位移智能主动调载技术, 以平南三桥为依托, 提出缆风索初张力的拟定方法与多施工阶段主动控制调载力的计算方法, 为工程设计与计算提供一定的参考。
1 原理与方法
1.1 缆风初张力拟定方法
缆风索一般采用钢绞线, 在自重的作用下会产生一定的垂度, 这个垂度与索力有关。索的垂度效应使得索端位移与索力之间呈现非线性关系, 其不同索力对应不同的弹性模量, 在应力较高的条件下, 可等效为桁架计算。工程上采用等效弹性模量来考虑垂度效应, Ernst等效弹性模量的公式为
Eeq=Ee/[1+ω2L2EeA/(12T3)]=μEe,
(1)
式中:Eeq为索的等效弹性模量;Ee为索的材料弹性模量;L为索的水平投影长度;ω为单位长度上斜拉索重力;A为索的截面面积;T为索的张力;μ为等效弹性模量系数(μ<1,T越大,μ越大)。在相同条件下, 当μ=0.5、 0.6、 0.7、 0.8和1时, 塔架的偏位情况见表1。

表1 不同等效弹性模量系数下结构偏位
在相同结构、 边界条件和荷载工况下, 不同等效弹性模量下的结构偏位有很大差别, 因此保证结构较高的等效弹性模量对控制结构偏位影响显著。
1.1.1 被动控制原理 传统的缆风索是通过结构偏位来平衡外荷载作用的, 外荷载越大, 结构偏位也就越大, 其水平位移控制原理为[13]
(2)
式中:H(t)为塔顶水平位移;F(t)为施工过程中各荷载对塔顶结构的水平力;K为塔的水平抗推刚度;γi为被动缆风的水平抗拉刚度系数(<1);Ai为被动缆风索截面面积;Li为被动缆风索长度。塔顶水平位移数值大小由塔水平抗弯刚度和被动缆风面积决定, 若要减小外荷载引起的塔架偏位保证拼装线形不受吊运荷载的影响, 则必须加大塔架刚度或者大面积增大缆风面积, 在工程实际中难以实现。
1.1.2 主动控制原理 智能主动控制是将设计的主动控制缆风进行初张以后安装上智能千斤顶, 通过GNSS自动化位移采集系统采集结构偏位, 由控制器对结构位移进行判别并向智能液压泵站发送千斤顶张拉或缩回的指令来实现索力的增加或减小, 从而达到减小结构位移的目的, 其控制原理[13]流程和示意见图1和图2。

图1 智能主动控制原理
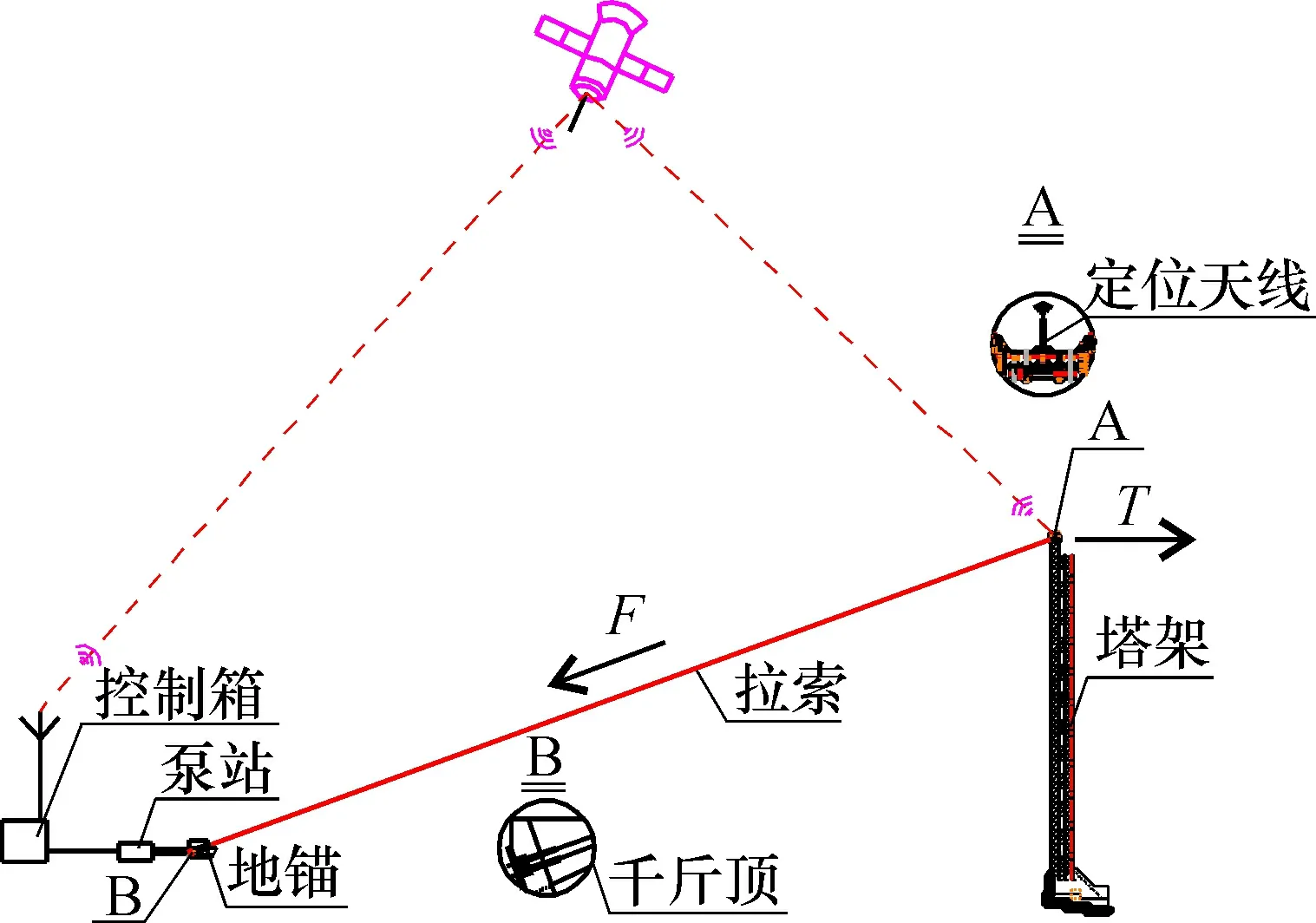
图2 智能主动控制示意图
主动控制是通过千斤顶张拉缆风, 由缆风对塔顶的水平分力ΔF(k)来减小外荷载F对塔架的作用, 从而实现塔顶水平偏位控制。主动控制下塔顶水平位移为
(3)
式中: ΔF(k)为主动调载力;γk为主动缆风的水平抗拉刚度系数(<1);Ak为主动缆风索截面面积;Lk为主动缆风索长度。
1.1.3 被动缆风索初张力 由式(1)、 (2)可知, 被动控制下, 如果塔架刚度、 缆风索布置方式不变, 就必须提高缆风索的张力, 使得缆风的抗拉刚度系数增大, 才能减小塔顶的水平位移。据此, 被动控制的缆风索的初张力应处于较高的应力状态, 但同时要保证结构不出现较大的应力, 初拟等效刚度系数约为μ=0.85。
1.1.4 主动调载缆风索初张力 由式(3)可知, 假定塔架在主动调载情况下基本保持垂直, 则被动缆风的长度未发生变化, 其有效弹性模量也不发生变化。主动控制的缆风是在进行初张与被动缆风达到平衡以后, 通过千斤顶的张拉与缩回以平衡外力, 因此其索力变化很大, 等效弹性模量也发生较大的变化。缆风初张的结构目标是塔架基本竖直, 如果主动缆风配索量与被动缆风一致, 则无法在调载过程中保证主动调载索有2.5的安全系数, 因此主动缆风索配索量较被动缆风多。由于配索量的不同, 主动缆风初张力的拟定方式也不同, 具体见图3: 1)在索保证2.5的安全系数条件下, 根据配索量拟定被动平衡索的初张力使索处于较高应力μ=0.85; 2)以塔架在自重和被动缆风索初张力荷载作用下处于基本垂直条件为目标, 求解主动缆风索初张力; 3)将以上两步求得的缆风索初张力施加到最不利荷载工况中, 进行结构分析, 以目标塔架位移作为控制指标, 求解主动缆风索张力; 4)校核上一步中主动缆风索张力是否接近2.5安全系数下的极限张力, 如果满足条件, 1)、 2)求得的缆风初张力则为合理初张力, 如果不满足则回到1)中调整张力大小, 然后重复步骤直到求解合理的初张力。
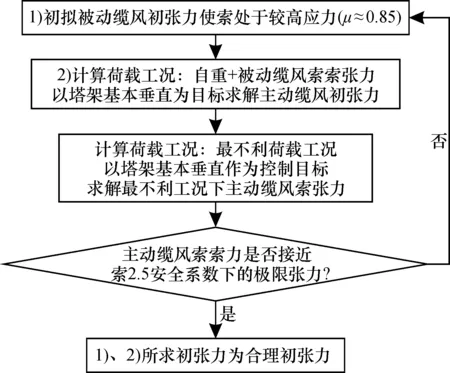
图3 智能主动调载缆风索初张力拟定流程
1.2 主拱悬拼过程的塔架主动调载计算方法
根据Ernst公式, 索在不同张力下其等效弹性模量是一直在变化的, 因此, 索对结构的影响也是不断变化的。调载以塔架全过程中基本处于竖直状态为目标, 故除主动平衡索以外, 其余结构的刚度没有发生明显的变化。根据本文的缆风索的初张力拟定方法, 能拟定出较大的主动调载索初张力, 其张拉过程中的等效弹性模量的变化幅度也相应得到控制。针对非线性单元, 有限元软件是通过迭代的方式进行非线性计算的, 其迭代过程中需要对非线性单元和结构不断修正刚度和不平衡力, 直到满足收敛条件。在主动调载计算中, 只有主动调载索张力产生变化, 其余结构刚度变化不大, 可以通过划分多个施工阶段, 提取施工阶段影响矩阵, 将主动调载索的非线性问题离散成多个线性过程, 即将施工阶段与影响矩阵法相结合进行调载过程中的位移和索力计算。主动控制以塔顶位移作为控制指标, 根据影响矩阵法[14-15], 若结构满足线性叠加原理, 则
Fi=Ai·Xi;
(4)
(5)
(6)
式中:Fi为第i施工阶段时控制点的结构位移与目标位移的差值向量;Ui为第i施工阶段控制点位移向量;Vi为第i施工阶段目标位移向量;Ai为主动调载索在第i施工阶段对应的索力下对控制点位移影响矩阵, 第1号主动调载索在第i施工阶段时, 索力对应为T1i, 其对各控制点的位移影响值为{aj1}i, 同理第n号主动调载索在第i施工阶段时, 其对各控制点的位移影响值为{ajn}i, 其中j为目标控制点,j=1, 2, …,n;Xi为主动调载索在第i施工阶段对应索力施加的荷载向量
(7)
因此, 各施工阶段的扣索张力荷载向量Xi为
(8)
模型设计参数如下:

目标函数 |Fi(x)|≤20 mm;
目标值Ti=T0+xi;
约束条件xi≥0&Ti≤0.4fptk;
状态变量F1(x)=A1·x1,F2(x)=A2·x2, …,Fn(x)=An·xn。
计算流程见图4。
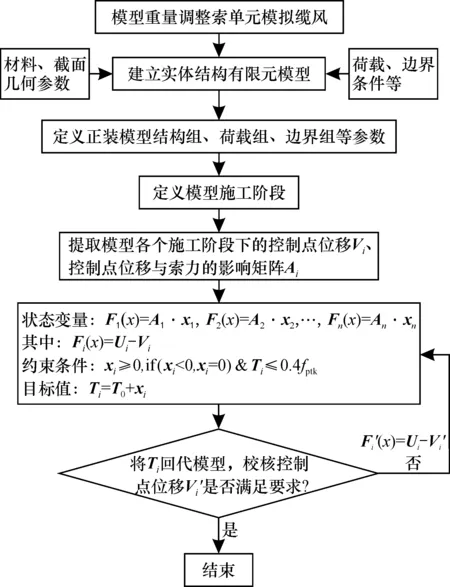
图4 塔架主动调载计算流程图
2 工程计算和分析
2.1 工程背景
荔浦—玉林高速公路平南三桥主跨575 m(净跨径548 m), 计算矢跨比1/4, 拱轴系数1.5, 设计风速24.0 m/s。缆索吊装系统跨径509.5 m+601 m+511.9 m, 采用“吊扣合一”式塔架, 南北两岸塔架对称, 总高200 m, 横桥向塔底总宽41.12 m, 塔顶总宽48.04 m, 顺桥向塔底总宽12 m, 塔顶宽4 m, 塔架示意图如图5所示。
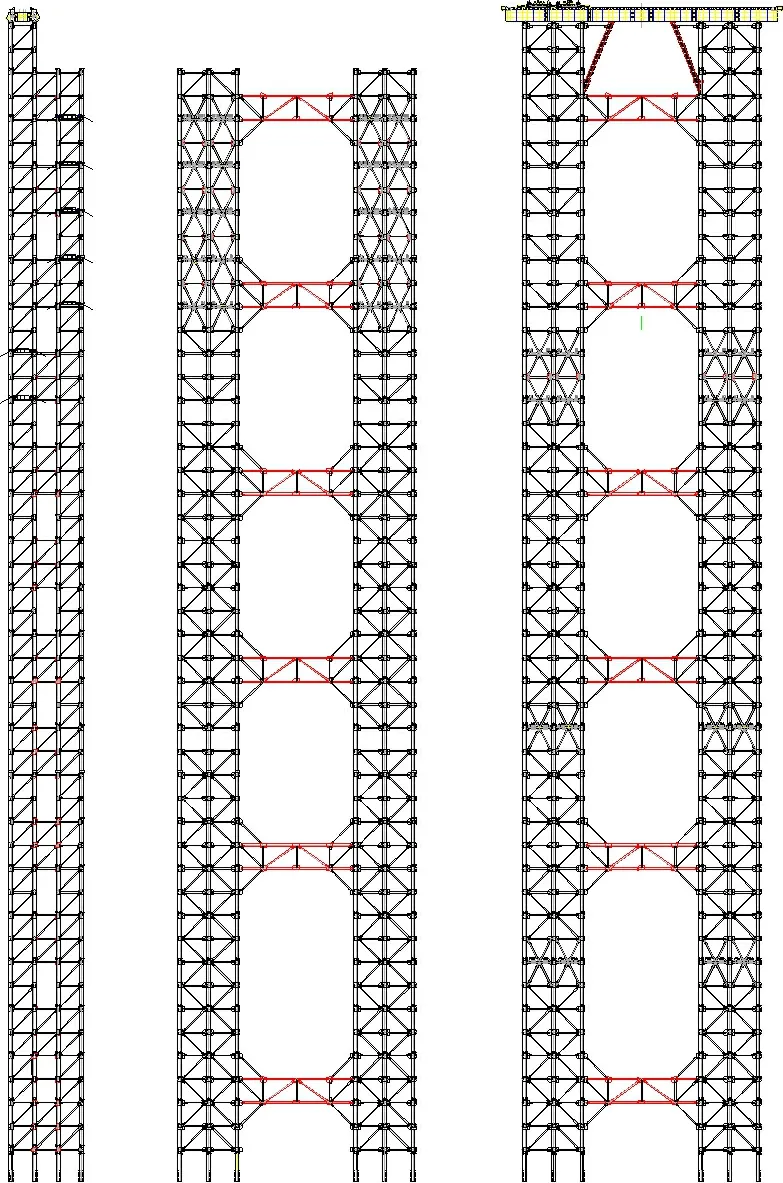
图5 塔架示意图
该塔架采用装配式重型钢管拼装, 竖向承重管采用Ф610 mm×14 mm、 Ф610 mm×16 mm及Ф610 mm×20 mm钢管, 立面斜杆采用Ф219 mm×6 mm钢管, 水平横杆和斜杆采用Ф168 mm×5 mm钢管, 横联采用Ф245 mm×7 mm水平钢管和Ф219 mm×6 mm斜撑钢管, 杆件采用节点板螺栓连接, 竖向主管采用法兰盘连接。立柱主管的纵向间距为4 m, 横向间距为4.9 m, 竖向每个节间高度4 m, 拱肋两肋中心间距30.1 m。塔架缆风索采用4组被动缆风索, 1组主动调载缆风索的布置形式, 缆风索采用直径为Ф15.2 mm的钢绞线。其中塔前布设10束被动缆风索, 每束8根, 塔顶布置8束, 塔腰布置2束; 塔后布置6束缆风索, 塔顶布置2束被动缆风索和2束主动缆风索, 每束20根, 塔腰处布置2束被动缆风索, 每束8根, 单侧塔架缆风索共计176根钢绞线。计算模型见图6。
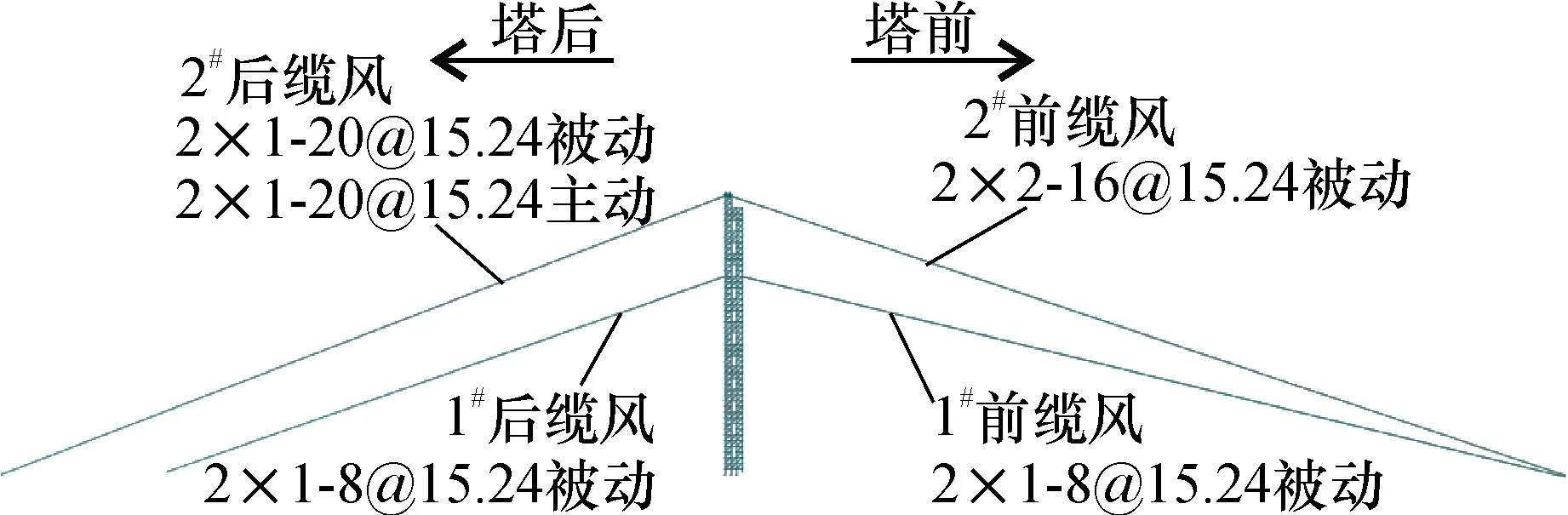
图6 缆风布置图
2.2 有限元数值模拟
2.2.1 模型建立 采用大型通用有限元软件Midas Civil建立平南三桥的正常吊塔架模型, 其中立柱、 塔顶横梁及扣索平台采用空间梁单元模拟, 腹杆采用空间桁架单元模拟, 缆风索采用索单元模拟, 塔底和地锚端采用固结。考虑正常吊装过程中的计算荷载主要有结构自重、 缆风索初张力、 节段扣挂荷载、 风荷载和吊运荷载。缆风索初张力见表2; 节段扣挂荷载采用“过程最优, 结果可控”的基于影响矩阵法的扣索力优化方法计算[16], 其余荷载按照相关规范计算。
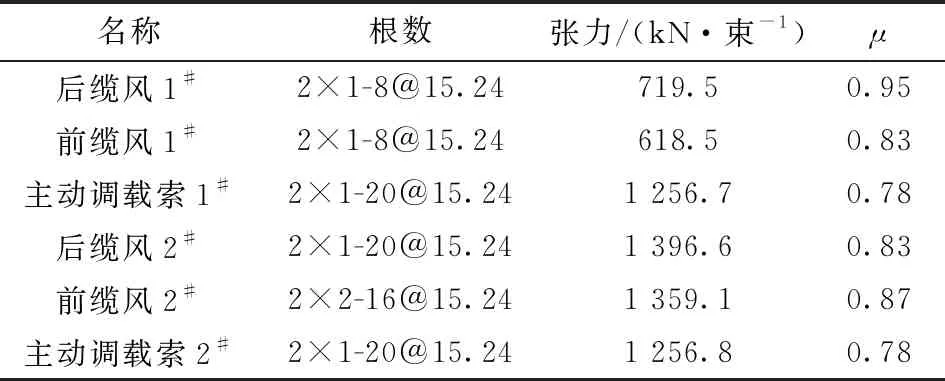
表2 各索初张力拟定情况
2.2.2 施工阶段划分 全桥根据每节段按跨中起吊、 吊运到扣点位置和完成扣挂进行施工阶段划分, 吊装全过程共计95个施工阶段, 其施工安装顺序见图7, 施工阶段划分见表3。
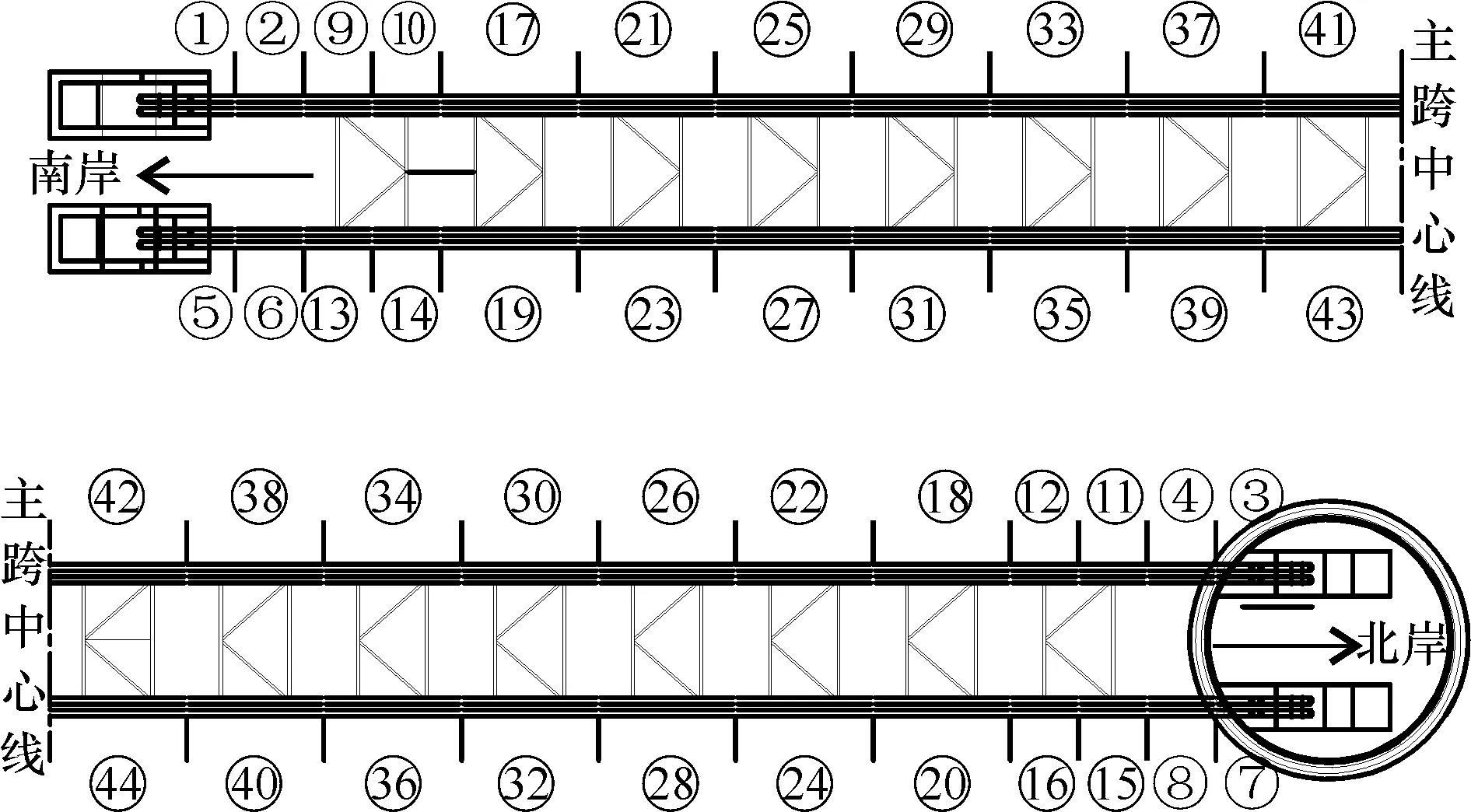
图7 模型节段安装顺序

表3 施工阶段划分
模型中对塔架按照吊装顺序进行上下游吊装模拟, 模拟分为同侧起吊和对侧起吊, 将同侧起吊划分为跨中起吊、 运输到扣挂位置、 完成安装3个施工阶段。 根据计算, 跨中起吊对塔架不平衡水平力最大, 因此, 对侧起吊仅考虑跨中位置对塔架的影响。举例说明: 上游第一节段分为4个施工阶段模拟, 同侧吊装考虑跨中起吊、 运送到扣点和安装完成, 对侧吊装仅考虑跨中起吊。为了进一步分析合龙前最不利工况, 在单边合龙前增设了一个运输到对侧扣点处的施工阶段。全桥共44个节段, 模型分析共计95个施工阶段。
2.2.3 初张力拟定结果 模型建立完成, 将被动平衡索以μ=0.85初拟初张力, 然后求解初平衡下的主动平衡索初张力, 进行最危险荷载工况下, 以塔架竖直为目标计算主动平衡索力, 求解主动调载索增量并检查各索索力是否超限, 如主动调载索索力过小, 则增大被动平衡索力, 提高主动调载索初张力, 若被动平衡索超限, 则提高塔后被动平衡索初张力, 降低主动调载索初张力。 经过多次调整, 各缆风索初张力拟定情况见表2。可知, 所有缆风的等效弹性模量系数μ均处在较高值, 能在保证索的安全系数条件下充分利用索的有效性。
2.2.4 施工阶段影响矩阵 塔顶2个主要控制点的施工阶段影响系数见图8, 分别提取主动调载索在各个施工阶段对塔顶控制节点的位移影响系数, 其表示在当前施工阶段刚度下, 主动调载索索力变化1 kN对应塔架顶部水平位移变化量。可知, 主动调载索对同侧控制点的系数比对侧控制点影响系数大1个数量级, 说明布置在塔架边缘两侧的主动缆风索, 其荷载变化主要影响同侧的塔架位移。

图8 调载索对塔顶位移影响系数(顺桥向)
2.3 分析结果
通过对塔架在正常施工过程中进行了被动控制、 主动控制分析, 提取塔顶上下游边缘处的控制点顺桥向位移进行对比分析, 以河内方向偏位为正, 其分析结果见图9。不进行主动调控, 即被动控制下的塔顶顺桥向随着施工进程交替变化, 其方向基本都朝河方向偏, 最大偏位为178.02 mm; 采用主动控制以后, 塔顶偏位不再出现大幅度的交替变化, 而且偏位均在20 mm以内, 说明采用本文的计算方法得出的主动调载力可以有效地控制塔顶偏位。由图10施工过程中被动控制和主动控制的索力增量变化可知, 被动控制和主动控制的索力均呈现明显的大小交替变化, 其中被动控制的幅度比主动控制的幅度要小很多。这说明被动控制是通过结构偏位产生的张力差与塔架抗推刚度来达到平衡的, 而主动控制则是通过千斤顶张拉与缩回来抵消外荷载的作用后, 使塔架处于平衡状态。 计算结果表明, 在缆风初张力基础上, 只需再给主动控制索提供约700 kN/束(35 kN/根)就可以达到控制要求。

图9 调载前后塔顶位移

图10 调载前后索力增量变化
3 工程测量结果分析
3.1 智能主动调载系统
根据以上计算结果, 全桥共布置两套智能主动调载系统如图12所示。单套系统设备由2台行程1 000 mm的型号为YC 3 000 kN-1 000 mm的千斤顶、 1台ZNTJB24×2的智能调载液压油泵、 1套TRS2-1N(1)2控制系统和2×1-20@15.24-1 860的主动调载索组成, 其中TRS2-1N(1)2控制系统由华测P5为代表的GNSS卫星地表位移监测设备(塔顶华测GNSS天线/接收机无线网桥)、 现场监控室、 控制箱、 油泵启动箱和千斤顶传感器等构成。塔架智能主动调载设备总体布置图见图11, 系统主要设备部件见图12。
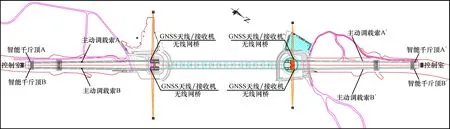
图11 塔架智能主动调载设备总体布置图
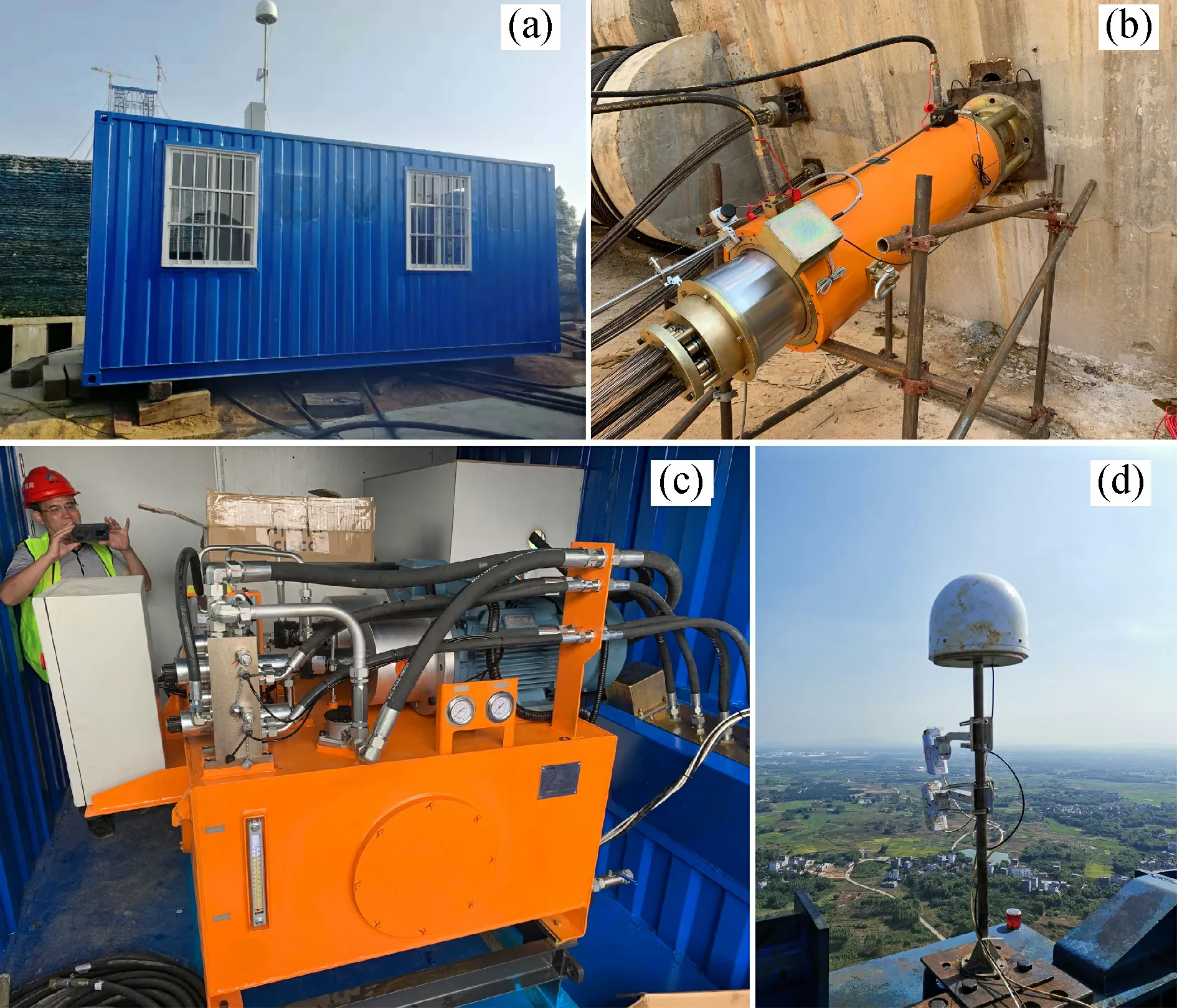
图12 智能主动调载系统设备部件
3.2 测量结果分析
平南三桥缆索吊装系统试吊试验于2019-10-08—11进行, 分别对空载调试、 55%G动载、 82%G动载、 110%G动载和125%G静载进行试验, 其中110%G动载试吊控制结果见图13,G为最大设计吊重。

图13 试吊110%G北岸塔顶实测水平位移
试吊110%G动载试验是从北岸上游平台处起吊, 将该配重下的钢绞线吊运到南岸再折返, 在跨中位置, 从船上再次起吊重物, 进行只提升不行走的125%G静载试验, 试验完成后, 再将荷载减轻到110%G, 最后运回到北岸。在整个试验过程中, 从两岸向跨中吊运过程中基本能将塔顶偏位控制在20 mm以内。当吊运至跨中附近塔顶偏位较大,北岸上游塔顶最大偏位达到51.2 mm, 在折返后进行125%G静载试验时, 其偏位达到了63.4 mm; 北岸下游塔顶测点全过程均能保持在25 mm的偏位内。以上的较大偏位, 持续时间都不长, 产生的原因除了荷载较设计荷载大10%和25%以外, 其值偏大的主要原因是缆风索实际张力与设计张力的偏差以及主缆与设计垂度的偏差引起的。针对缆风索实际张力与设计张力的偏差问题, 需要对缆风张拉方法进行进一步研究, 由于被动平衡索无法进行主动控制, 所以应分多级先将被动平衡索张拉至设计张拉力, 最后由主动平衡索来调整塔架偏位。
平南三桥首节段于2019年10月12日开始起吊, 当天15:10完成节段翻身, 从北岸翻身平台运输到南岸上游铰轴处进行安装, 直至21:10左右完成首节段安装; 25#节段于12月3日09:30左右从跨中起吊, 17:30左右基本完成吊装过程, 吊装过程结束后关闭主动调载系统。根据GNSS位移实时监测系统进行塔顶水平位移检测, 监测结果见图14。
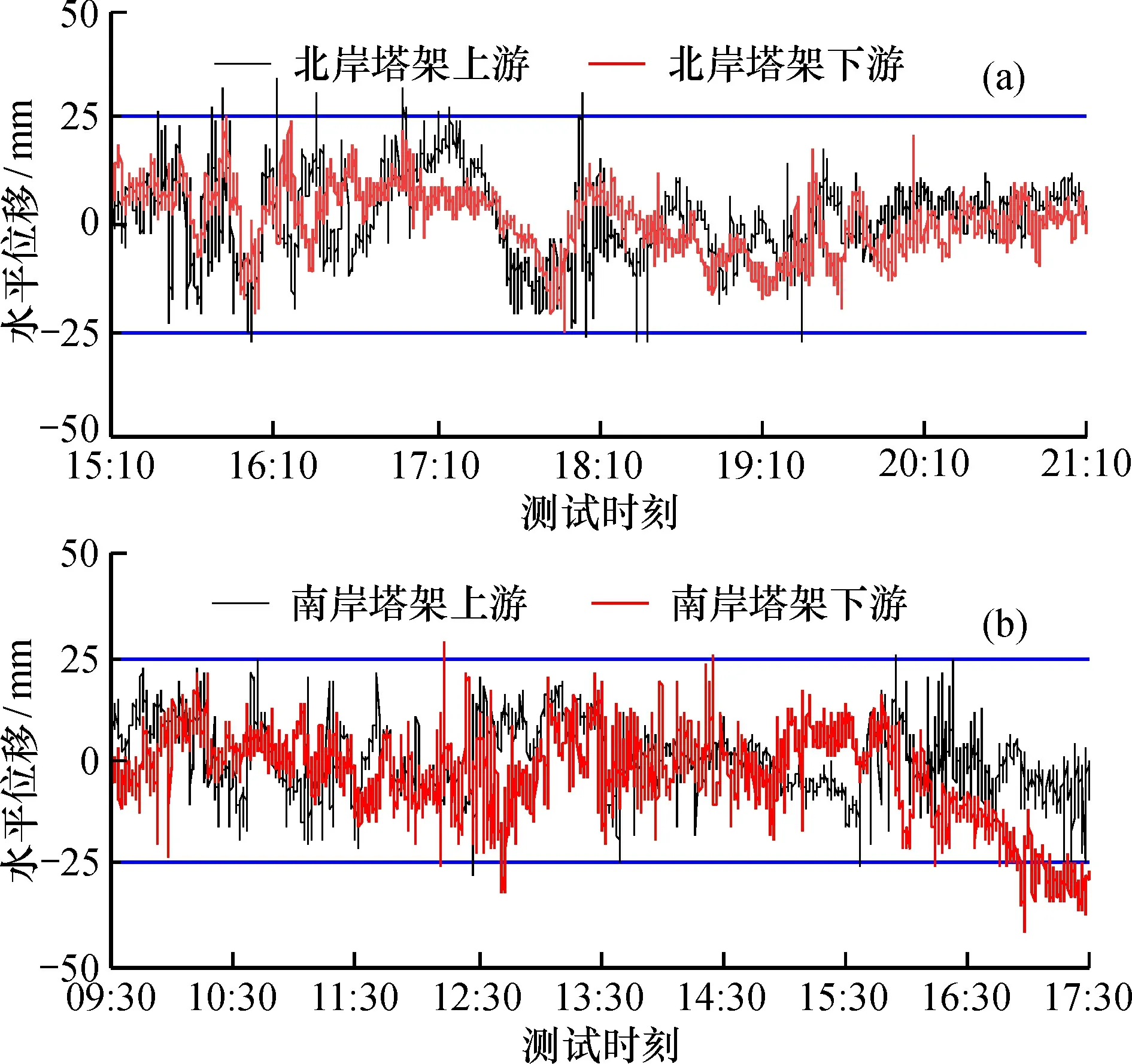
图14 吊装首节段北岸塔顶 (a)、 25#节段南岸塔顶(b)实测水平位移
可以看出, 对缆风初张力进行调整以后, 吊装首节段和25#节段整个吊运过程中, 虽然塔顶偏位在智能调载过程中不停地反复波动, 但基本都在25 mm以内(控制目标为25 mm), 说明这套反馈控制的智能调载系统可以根据实测偏位来控制千斤顶张拉和放松, 并达到预定控制要求。
4 结 论
通过考虑索结构的几何非线性影响拟定出较高等效弹性模量的缆风初张力, 在此基础上结合施工阶段影响矩阵法进行各施工阶段调载索力计算, 根据计算结果拟定满足全过程要求的设备方案, 经工程应用和实测结果得出以下几点结论:
(1)缆风初张力拟定方法, 能有效地拟定出合理的缆风初张力, 在该初张力下结构弹性模量较高, 而且全过程均能满足2.5的安全系数, 同时结合智能主动调载技术, 能在保证结构处于安全的同时尽可能发挥缆风索的效用, 最大程度地减少缆风用量。
(2)采用施工阶段影响矩阵计算调载索力的方法, 计算目标明确、 速度快, 只要提取施工阶段相关的影响系数和结构偏位, 就可以根据目标函数快速地求解出每个施工阶段所需的调载力, 不需多次人工调整就可以达到目标要求。
(3)实测结果显示, 采用该计算方法能拟定出合理的调载力与智能主动调载方案, 在使用较少的缆风索的情况下, 能有效地将塔顶最大水平偏位控制在25 mm左右, 保证钢管混凝土拱桥悬拼施工的高精度要求。
猜你喜欢
上海航天(2022年5期)2022-12-05 01:55:46
中国民航大学学报(2021年5期)2021-12-04 06:12:18
工程与建设(2019年3期)2019-10-10 01:40:18
红领巾·萌芽(2019年2期)2019-04-18 02:11:36
消费导刊(2018年10期)2018-08-20 02:56:20
福建交通科技(2018年4期)2018-07-05 02:29:54
小猕猴学习画刊·下半月(2017年4期)2017-05-30 10:48:04
中学数学杂志(2016年1期)2016-02-16 15:11:27
石油化工建设(2015年6期)2015-12-01 04:17:34
石油化工建设(2015年6期)2015-12-01 04:17:30
