基于特征谱分析的领导-追随者网络一致性
2021-08-10 09:36:20李一帆孙伟刚
杭州电子科技大学学报(自然科学版) 2021年4期
李一帆,孙伟刚
(杭州电子科技大学理学院,浙江 杭州 310018)
0 引 言
多智能体系统一致性理论在人工智能、通信与控制等领域有着广泛的应用,如无人机编队、卫星协同工作。多智能体一致性指通过设计各个智能体之间的一致性协议,利用智能体之间的局部信息,不断调整自己的行为,使得所有智能体的状态最终达到一致[1-2]。作为一类重要的一致性问题,领导-追随者多智能体系统的一致性越来越受关注,其中领导者的状态不受其它智能体影响,而其它智能体尽可能追随领导者[3]。由于多智能体系统无法避免噪声的干扰,因此研究系统对噪声的鲁棒性非常重要。2010年,Patterson等[4]提出了含有噪声的领导-追随者网络一致性概念,在H2范数下,证明了领导-追随者网络一致性是由拉普拉斯矩阵的特征谱所决定,同时提出几种用于选择领导者的贪婪算法,从而使得网络达到最优一致性。Yi等[5]研究了一个领导者的无标度小世界Koch网络,得到领导-追随者一致性的精确结果,并指出网络的一致性不仅与领导者到中心节点的最短路径有关,还取决于领导者的度。众所周知,网络的拓扑结构决定了其特征谱,因此计算网络的特征谱面临着技术挑战。目前,给出含有多个领导者的领导-追随者网络一致性精确解的相关研究文献鲜少,同时,领导者数目对一致性是否有影响也值得深入探讨。为此,本文借助一类确定性网络模型[6],得到含有多个领导设置的一致性解析表达式,揭示领导者对一致性影响的机理。
1 预备知识
1.1 拉普拉斯矩阵
记G是一个由N个节点组成的无向连通网络。设A=[Aij]N×N是G的邻接矩阵,如果节点i和节点j之间有连接,则Aij=Aji=1(i≠j),否则,Aij=Aji=0。令D=diag{k1,k2,…,kN}为G的度对角阵,其中ki为节点i的度,则网络的拉普拉斯矩阵为L=D-A。
1.2 领导-追随者网络一致性
N维系统的领导-追随者网络的动力学表示如下:

(1)
式中,x(t)是状态向量,I是单位矩阵,H=diag{h1,h2,…,hN},如果节点i是领导者,则hi=1,否则hi=0,η(t)表示高斯白噪声。


(2)
式中,1表示元素全为1的向量。
将式(2)代入式(1),可得:

假设系统有α个节点为领导者,剩余N-α个节点为追随者。追随者受到噪声干扰并根据局部信息调整自己的状态。令xl(t)和xf(t)分别表示领导者和追随者的状态,则系统(1)可以写为:

定义领导-追随者网络一致性定义为偏离领导节点状态的平均稳态方差[5],即:

文献[5]的研究成果表明,领导-追随者网络的一致性可以由拉普拉斯主子阵的特征值来表示,即:

2 一类特殊网络拉普拉斯主子阵的特征谱计算
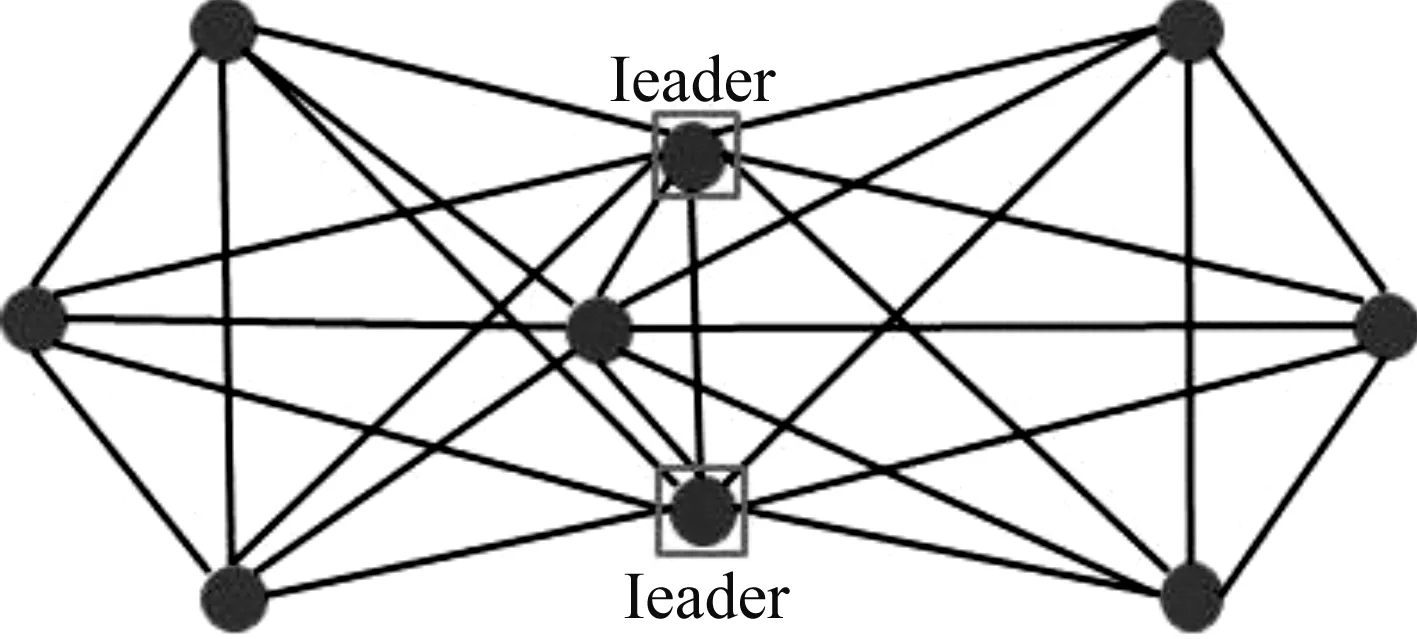
图1 具有2个领导者的网络模型
由于网络拓扑结构多样性,解析计算领导-追随者网络一致性结果面临技术挑战。本文选取由3个参数控制的一类windmill-网络模型作为研究对象[7],网络模型由l个中心节点和m个kn-完全图组成的社团连接而成,其中kn的每个节点都与l个中心节点连接,并且l个中心节点组成一个kl-完全图。根据网络拓扑结构特点,网络节点总数N=mn+l。具有2个领导者的网络模型W(3,2,3)结构如图1所示。
根据网络W(l,m,n)的拓扑结构,其拉普拉斯矩阵L为:
式中,J是元素全为1的矩阵,0是零矩阵。本文在中心节点中随机选取α个节点作为领导者,即在该网络的拉普拉斯矩阵中删除领导者所在的行和列,则该网络的拉普拉斯主子阵表示为:

从第2列开始,将每1列加到第1列,可得:
(3)
根据行列式的特征,继续将每1列加到第1列,再将第1行乘以-1加到每1行,可得:


(α-λ)(mn+l-λ)l-α-1(mn+1-λ)(l-λ)m-1(n+l-λ)m(n-1)
(4)

3 领导-追随者网络一致性分析
根据定义,网络的一致性的精确表达式如下:
(5)
当参数n→∞,HLF→0时,网络随着n的增大最终趋于一致。选取参数l=25,m=10,进行数值模拟,当领导者数目分别为2,4,8时,参数n对网络一致性的影响如图3所示。从图3可以看出,n越大,网络一致性越好,与理论解析结果相符。
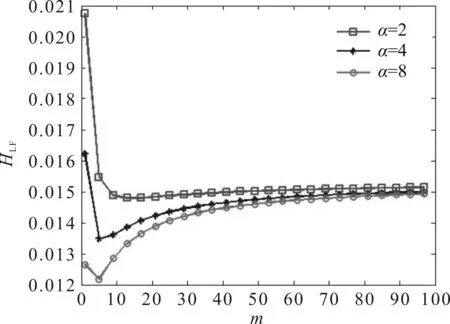
图2 不同领导者数目下,参数m对网络一致性的影响
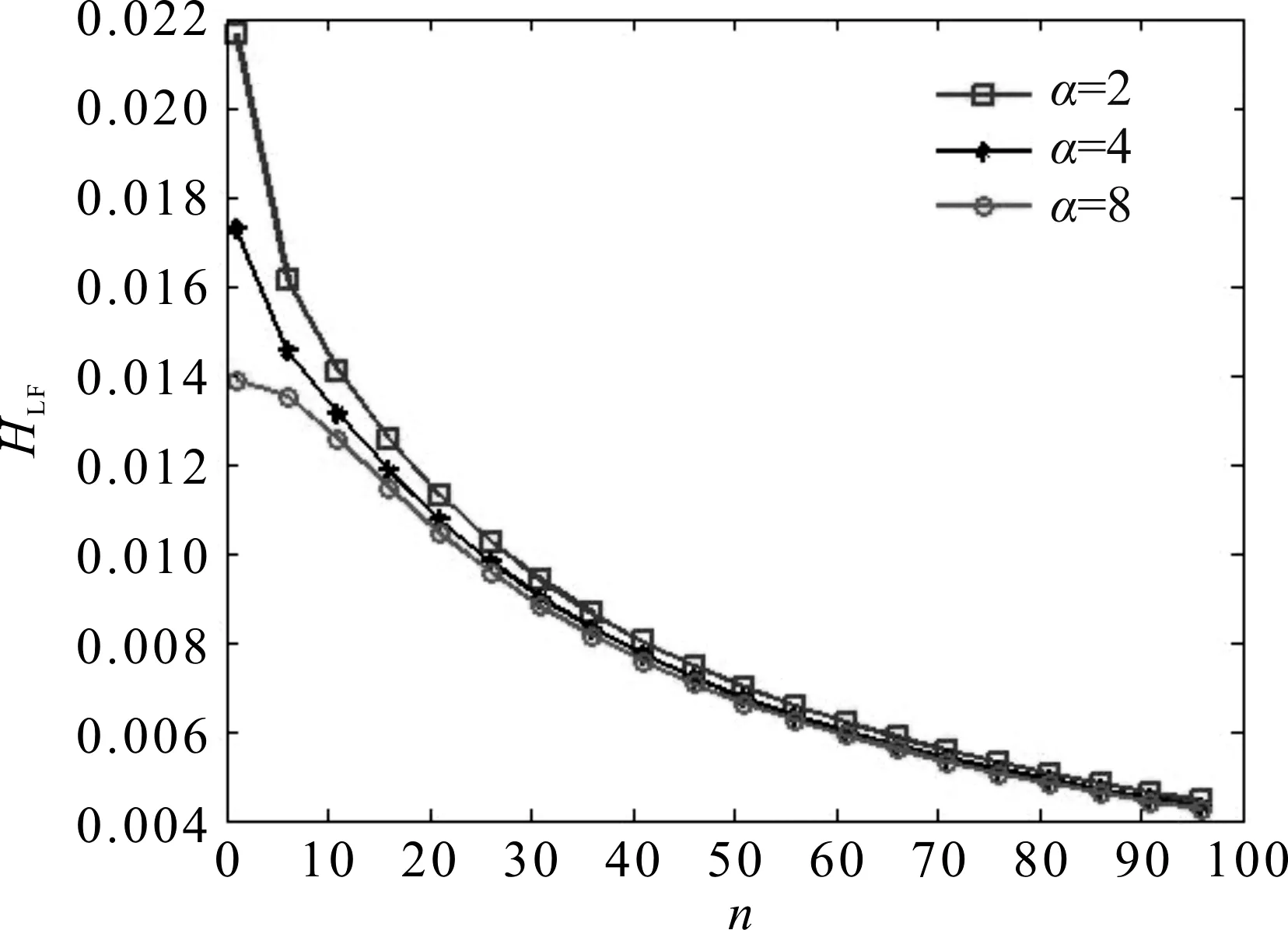
图3 不同领导者数目下,参数n对网络一致性的影响

图4 领导者数目对网络一致性的影响

4 结束语
本文应用一类确定性网络计算了具有多个领导者设置的领导-追随者网络一致性。通过网络拓扑结构,精确计算了网络拉普拉斯主子阵的特征谱,由此得到领导-追随者网络一致性的解析表达式,为研究具有多个领导者的多智能体一致性问题提供理论指导。但是,本文研究中,领导者设置在中心节点,下一步考虑将领导者位置设置在其余节点,展开进一步研究与探索。
猜你喜欢
井冈教育(2022年2期)2022-10-14 03:11:52
幼儿100(2022年23期)2022-06-10 03:33:30
河南畜牧兽医(2017年8期)2017-11-24 03:21:56
中国医院院长(2017年7期)2017-06-15 12:58:06
现代计算机(2016年11期)2016-02-28 18:35:21
汽车零部件(2014年1期)2014-09-21 11:58:39
爱你(2014年13期)2014-08-09 09:58:48
中央民族大学学报(自然科学版)(2014年2期)2014-06-09 08:28:14
郑州大学学报(理学版)(2014年3期)2014-03-01 04:21:01
决策(2013年4期)2013-12-19 23:51:07