具有追踪控制特征的多阶段双激励评价方法
2021-08-04 06:36:44于兆吉
系统工程学报 2021年2期
刁 鹏, 侯 芳, 于兆吉
(沈阳工业大学管理学院,辽宁沈阳110870)
1 引 言
在管理实践过程中,激励一直扮演着重要角色,有效激励措施可以改进管理方法的效率,因此不断完善激励理论和方法对科学管理理论和技术的发展具有十分重要的意义.激励评价是指依据被评价对象的发展状态,在评价信息的集结过程中通过一定的方式实现奖优罚劣的目的[1].在激励评价过程中融入决策者的激励偏好,能够对被评价对象的可持续发展起到促进作用.激励评价是综合评价方法面向管理实践的具体应用,现已成为管理者的有效管理工具,激励评价方法近年来取得了丰富成果[1−10].
目前,动态激励评价的研究集中于评价过程中信息集结[1,4−9,11−17].激励评价理论研究,如易平涛[9]等利用两条激励控制线对处于不同时段被评价对象进行相应的奖惩,该方法考虑被评价对象变化的整个过程,将离散的信息连续化,充分体现其动态的评价意图;李伟伟等[1]提出分布分位数概念来衡量指标值相对发展水平,以此进行加权集结并建立有序分位加权算子,但激励偏好系数是根据决策者根据自身偏好给定缺乏理论依据;McCollum[2]、Perera[3]从实例分析入手讨论了激励方法和激励措施在管理实践中的作用和问题;Karlan[4]、Shulman[5]和Botivinik[10]分别从管理理论高度分析了激励方法在评价和决策中的专业作用.马赞福[14]通过考虑被评价对象在不同时刻发展的差异性,提出了基于属性值增益水平的信息集结方法.张发明等[16]在此基础之上提出了显性与隐性结合的动态双激励评价方法.
通过上述分析可知,激励评价理论与方法目前研究还不是很充分,现有激励评价研究方法设计主要是从正向逻辑出发结合激励模型,得到被评价对象的激励评价值,以此对其进行相应的奖惩以达到评价系统发展的目的.结合实际情况不难发现激励评价方法在使用过程中面临如下问题:一方面,管理环境及评价问题的复杂性要求激励评价方法具有较强的柔性和适应性;另一方面,动态激励问题的时间特征要求评价方法能够精准激励从而改进方法的有效性.
因此,本文面向激励控制方法柔性和精准激励需求问题,考虑属性值相对发展水平在激励评价方法设计中的作用,提出一种具有追踪控制特征的激励评价方法.该方法的基本思路: 根据各时段被评价对象的发展状态确定精准激励控制线和惩罚控制线的斜率以及追踪激励控制线的偏折点,并算出偏折后正负激励所在的时间区间,根据正负激励相等原则[9]计算出正负激励系数,得出带激励特征的综合评价值.本文主要创新之处是根据被评价对象发展状态提出具有追踪控制特征的激励控制折线和惩罚控制直线的改进双激励控制线设置思路,通过评价过程中的精准激励设置解决激励控制程度调节的问题,以此起到“罚严奖易”的激励作用.该方法还可以追踪被评价对象不同时段的发展状态改变激励控制强度,从而达到精准激励的作用.与已有的文献中激励控制线理论相比,本文给出的具有追踪控制特征的激励评价方法,能够根据被评价对象的发展状态更加细腻的制定对应激励措施,同时可以令被评价对象对自身的发展状态有着更加清晰的认识,从而促进被评价对象系统的可持续发展.
2 原理与方法
2.1 激励控制折线段的原理
构建平面直角坐标系,以离散时间点为横坐标轴,记为x(tk) =xtk,k= 1,2,...,N,对应着N −1 个连续时间段,其中假设每段时间间隔是等间距的.令x0为初始点的横坐标.
以纵坐标轴表示评价值.y0表示初始点的纵坐标值,yi1表示被评价对象oi在t1时刻的评价值, 假设y0∈[min(yi1),max(yi1)],由文献[9]知惩罚控制线的初始点的纵坐标y−0取值要不失公允性,可取值为初始时刻各被评价对象评价值的算术平均值.
惩罚控制线以直线形式给出,体现出评价过程中“从严处罚”的原则,可描述为

为了使激励评价具有追踪控制特征,激励控制线以折线的形式给出,以实现追踪被评价对象发展状况精准调节的目的.当被评价对象在[tp,tp+q]时段内发展正常,则

其中k+(k+̸=0)表示某评价时段内激励控制线的斜率,x满足x ∈[tp,tp+q],q(q ̸=0)表示被评价对象的评价状态所持续的时长.由于x有固定的取值范围,因此式(2)描述的是一条直线段.关于正负激励控制线斜率的计算详见定义1.
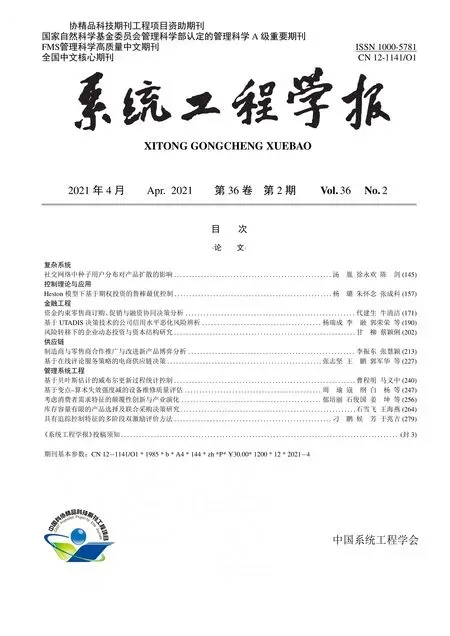
定义1对于n个被评价对象(o1,o2,...,on),被评价对象oi在tk处取值为yitk,称
分别为被评价对象在T时段内的最大增长率、最小增长率和平均增长率.
激励控制线斜率k+(k+̸=0)以及惩罚线斜率k−为

其中α+,α−(α± ∈(0,1])称之为精准激励线和惩罚线斜率的偏移度.
通过式(3)~式(7)可以求解激励控制线斜率k+(k+̸=0)以及惩罚线斜率k−.
斜率的偏移度是根据决策者对于评价对象发展状况的一种实时调控,便于对评价过程精准激励控制折线与惩罚线斜率的把控.对于惩罚控制线斜率是否可以取正值的问题,在下文中会进一步阐述.
当被评价对象oi在[tk,tk+1]时段内发展状况较差,即yitk+1/yitk <1 且评价值yitk+1取值位于激励控制线之下,则激励控制线开始发生偏折,以便更好地应对被评价对象当前发展状态给予适当的激励.不失一般性,假设偏折后的激励控制线斜率k+=0,以此对处于低迷状态的被评价对象起到激励刺激的作用.此时激励控制线段可描述为

其中ytp表示被评价对象处于tp时刻对应的评价值,所以ytp是个固定常数值.
综上,精准激励控制线可描述为

激励控制线段是专家已有的知识经验的储备,是其偏好判断的集中反应,由于在评价的过程中考虑不同激励的因素及评价环境的变化,所以专家可以根据主观判断短时间内适当调节偏好控制程度,因此激励控制线可以改为折线形式.
2.2 多阶段精准激励评价方法
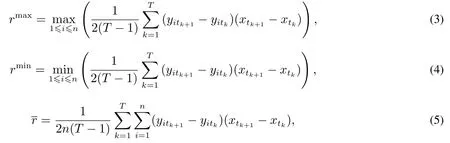
具有精准激励特征的多阶段评价方法基本思路如图1 所示.图1 横轴表示评价周期,此处由10 个评价考核点具体划分为9 个评价考核区间,对于划分后某单位时间段内,被评价对象oi在该时段的状态可认为是均匀变化的.因此,在坐标轴上将相邻两个时刻的评价值的连线可视为被评价对象在该相邻时间段的发展轨迹.在[t1,t2]时段内,被评价对象状态良好,评价状态呈上升趋势,此时激励控制折线不发生偏折, 斜率为k+(激励控制线的斜率是根据被评价对象在所有评价考核区间的综合发展状态确定的,是追踪被评价对象状态的实时反映,因此偏折后的斜率与初始设定的斜率相同);在[t2,t3]时段间,被评价对象状态变差,评价状态呈下降趋势,且t3时刻的评价值小于惩罚控制线的对应值,因此从t3时刻开始,激励控制线发生偏折,偏折后的线段斜率取值为0;在[t3,t4]时段内,被评价对象状态发生改变,评价状态呈上升趋势,且t4时刻的评价值大于该时刻激励控制线对应值,即从t4时刻起激励控制线发生第二次偏折,斜率取值为k+;在[t4,t5]时段内,虽然被评价对象评价状态呈下降趋势,但是在t5时刻其评价值仍位于激励控制线之上,因此激励控制线不发生偏折;在[t5,t6]时段内,评价状态呈下降趋势,且在t6时刻其评价值位于激励控制线之下,因此激励控制线在t6时刻起发生偏折,偏折后斜率为0;在[t6,t7]时段内,被评价对象发展轨迹处于激励控制线与惩罚控制线之间呈现递增趋势,此时激励控制线在t7时刻起发生偏折.
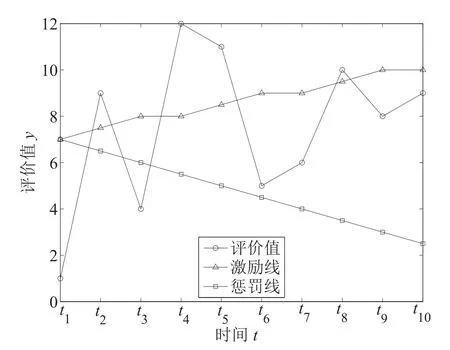
图1 双激励控制折线动态信息集结示意图Fig.1 Figure of dynamic information aggregation for double-excitation control polyline
被评价对象发展路径与横轴所围成的面积反应被评价对象oi在[tk,tk+1]时段内总体变化情况,那么被评价对象oi在该时段内综合评价值可以用积分形式表示为

此外,被评价对象oi在[tk,tk+1]时段内的动态激励评价值要考虑处于正负激励控制区间的奖惩,可得

其中µ+,µ−分别为正负激励系数,而分别为si(xtk,xtk+1)中正激励评价值和负激励评价值.
正负激励系数µ+,µ−的确定以及激励控制线的偏折要满足以下三个条件:
1)偏折激励控制线着重体现正向激励的作用,以“罚严奖易”为管理原则.即激励控制偏折调节体现在正向激励控制中,惩罚线并不发生偏折,见图1,正向激励线为折线,追踪被评价对象发展状态进行实时调节,惩罚线为直线.
在定义1 中斜率的设置由被评价对象各时段发展状态和斜率偏移度控制.由式(6)和式(7) 可以看出当α−=0 时惩罚控制线的斜率为正值.所以当惩罚线斜率取值为正值时,为防止激励线和惩罚线相交而违背激励评价设置原则,在精准激励控制线和惩罚控制线斜率设置时要求激励控制线与惩罚控制线不相交.
2)激励守恒(n个被评价对象的正向和负向的激励总量相等),即

3)适度激励(正负激励系数的和为1),即

将激励控制原则及式(12)和式(13)联立可以计算正负激励系数µ+,µ−的具体数值,以便于进一步调节管理激励措施和方法.
由图1 可知,对任意被评价对象来说,在不同时间段内它所受的激励情况不同,如在[t1,t2]时段内同时具有正负两种激励,在[t4,t5]时段内仅仅具有正向激励,在[t6,t7]时段内正负激励均无.为此表1 给出不同情况下评价值的计算方法,对符号进行界定如下:
1)“↗”表示该时段被评价对象的发展轨迹呈上升趋势,“↘”表示该时段被评价对象的发展轨迹呈下降趋势.
2)“±”表示该时段先受到正向激励,后受到负向激励;“∓”表示该时段先受到负向激励,后受到正向激励;“+”表示该时段部分具有正激励,部分无激励;“–”表示该时段部分具有负激励,部分无激励;“++”表示在该时段内被评价对象发展轨迹在激励控制线之上,全部具有正向激励;“––”表示在该时段内被评价对象发展轨迹在惩罚控制线之下,全部具有负向激励.
3)sitk表示在某时段内无正负激励.表1 中,为了适应坐标系中积分运算,评价时间tk用xtk代替;表示在同时具有正负激励控制的时段内,被评价对象发展路径与激励控制线的交点的坐标;表示在时段内先具有负向激励后具有正向激励,那么趋势为上升的;表示在该时段内先具有正向激励后具有负向激励,因此趋势是下降的.

表1 不同时段激励评价值计算式Table 1 Formulas for the value of incentive evaluation in different periods
性质1在精准激励评价规则下,被评价对象的多阶段精准激励评价结果恒大于零.
证明被评价对象oi在[tk,tk+1]内的动态激励评价值由式(11)可得

3 示例分析
甲、乙、丙和丁4 名员工为某知识密集型公司现有的技术骨干,先对其进行多阶段绩效考核,本次考核取1 个考核周期,包括10 个考核时间点.四位员工的量化绩效考核成绩见表2.该公司如何对四位员工在考核周期内的表现进行激励评价.

表2 四位员工绩效考核成绩Table 2 Score of performance appraisal of four employees
由表2 可知,甲、乙、丙和丁四位员工近十个考核时间点绩效考核成绩的算术平均值差异不明显,因此算术平均值进行信息集结无法区分员工的优劣.以下是采用具有追踪特征的多阶段双激励评价方法处理该问题的过程.
步骤1设定横轴代表时间变量tk,k=1,2,...,10,本文选择激励控制折线的初始点(1,36.333 4),此处的36.333 4 为t1时刻四位员工考核成绩的平均值.
步骤2根据式(3)~式(7)计算激励控制线与惩罚控制线的斜率.
步骤3分别绘制各员工多阶段信息图(评价值趋势图,激励控制线,惩罚控制线),根据图表求解各时段正负激励评价信息.
由表2 可知,被评价对象丙的多阶段信息较为复杂,本文为以丙员工信息为例,对其各阶段被评价值进行处理并得到其具有追踪特征的激励控制线和惩罚控制线,如图2 所示.
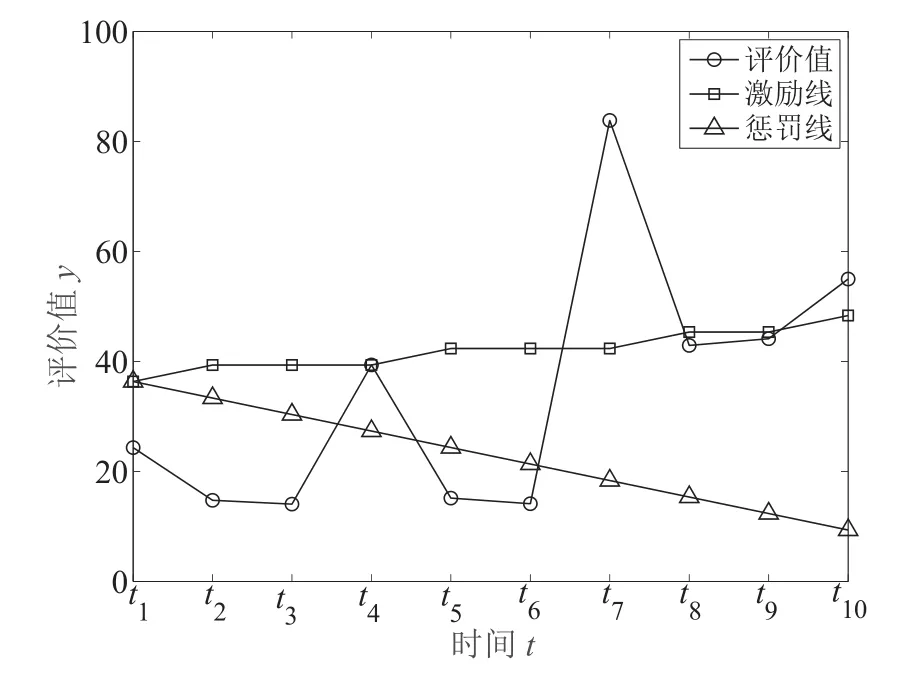
图2 被评价对象丙的多阶段评价状态图Fig.2 Figure of multi-stage evaluation state of the evaluated object C
根据图2 中被评价对象丙的多阶段信息图以及激励控制折线图可以得到丙员工各时段追踪激励情况如表3.
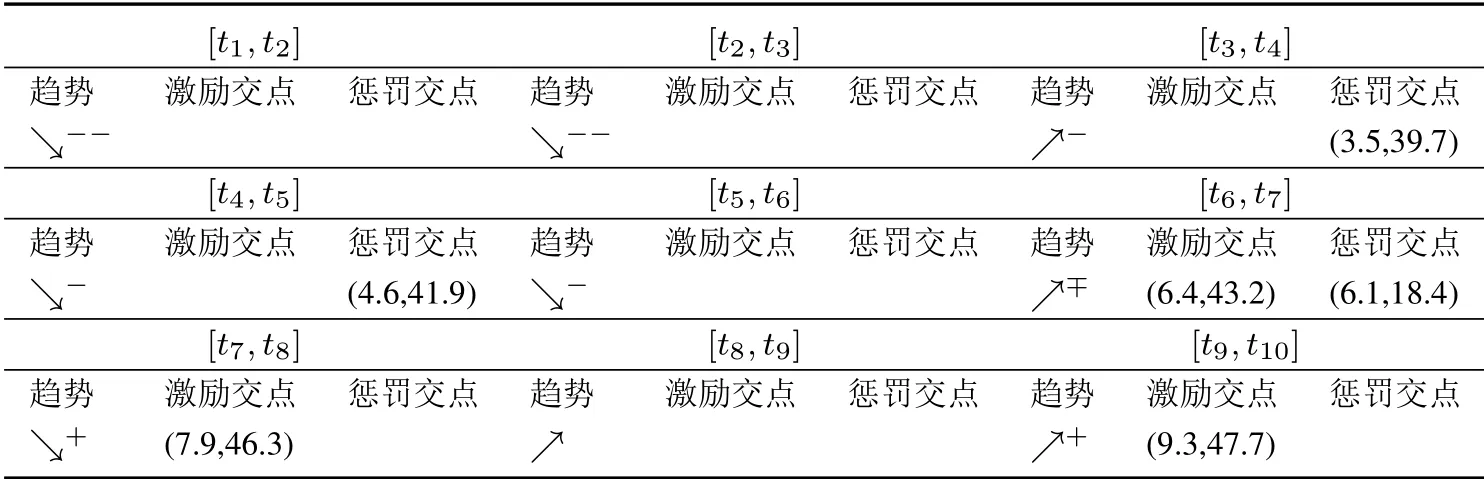
表3 被评价对象丙动态演化情况Table 3 Dynamic evolution of the evaluated object C
由表1 和表3 中被评价对象丙各阶段正负激励信息结果见表4.

表4 被评价对象丙各阶段激励信息Table 4 Incentive information of the evaluated object C in different stages
步骤4重复进行步骤3,将四名被评价对象各阶段激励信息进行归类可得表5.
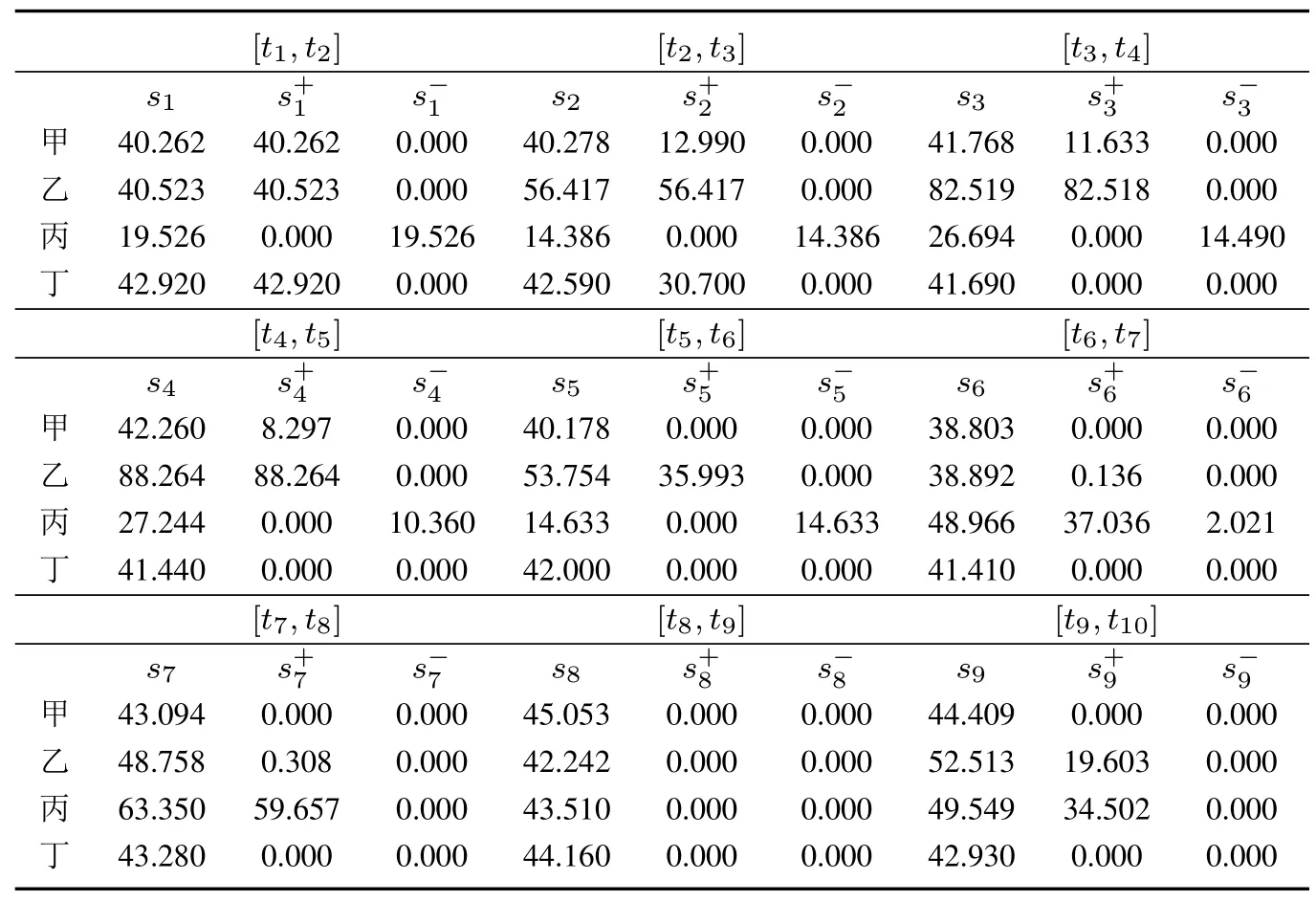
表5 被评价对象各阶段激励信息Table 5 Incentive information of the evaluated object in different stages
步骤5根据步骤4 所求正负评价信息,结合式(12)和式(13)求解正负激励系数,计算得出正负激励系数µ+=0.111 4,µ−=0.888 6.
步骤6根据式(8)可求解甲、乙、丙和丁四人在各阶段总动态激励评价值,结果可见表6.
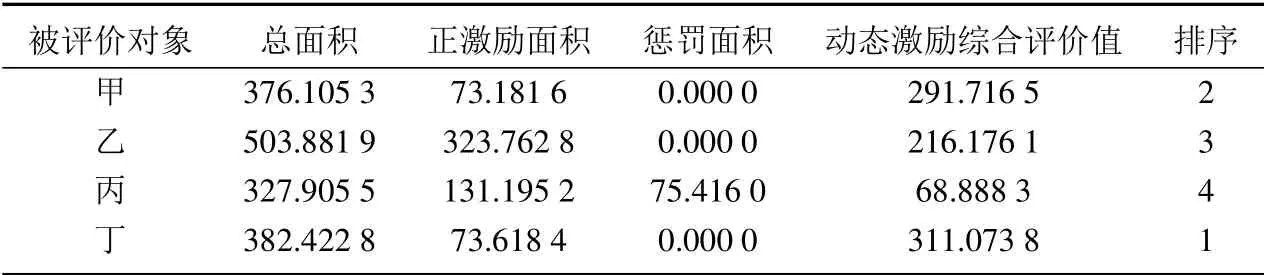
表6 激励评价结果Table 6 Result of incentive evaluation
因此,运用具有追踪控制特征的多阶段双激励评价方法计算得到4 位技术骨干在该考核周期的总体排序为“丁≻甲≻乙≻丙”(“≻”表示优于)
4 结果分析
对上面的算例,应用文献[9]中双激励控制线的方法进行测算,可得被评价对象多阶段信息,如图3 所示.

图3 被评价对象多阶段评价状态图Fig.3 Figure of multi-stage evaluation state of the evaluated object
激励评价结果见表7,对比表6 和表7,可以得到以下3 个结论:
1)甲、乙、丙和丁四名员工的激励评价值排序发生改变,表6 中被评价对象丁排名第一.具有可持续发展特征的被评价对象才是复杂管理所需要的,由表2 中数据可以发现被评价对象丁的各时段评价值相对发展比较稳定,因此丁发展更具优势.
2)表6 应用追踪控制特征的激励评价方法所得到的四名员工的激励评价值比表7 对应的值小.所以该方法进一步体现出适度激励和精准激励的原则.在激励评价中激励评价取值不应过大,否则会导致被评价对象过高评估自己的发展状态对系统发展造成不良影响.
3)被评价对象丙,其大部分被评价值位于惩罚控制线之下,所以本文所提出的方法不会改变丙的排序结果.

表7 基于双激励控制线直线激励评价结果Table 7 Evaluation results of linear excitation based on double excitation control line
5 结束语
本文应对于管理实践中的精准激励问题提出一种具有追踪控制特征的激励评价方法.该方法能追踪被评价对象在各时段发展状态对被评价对象实施更加精准的激励;准确划分各被评价对象的正负激励面积,更加细腻的刻画被评价对象间的发展差异,凸显被评价对象的发展现状;充分利用专家的知识经验,评价结果更具可信性.进一步将研究多阶段双激励评价方法在泛激励评价和分层激励评价中的相关应用.
猜你喜欢
河北地质(2021年3期)2021-11-05 08:16:16
物理之友(2020年12期)2020-07-16 05:39:16
小读者(2020年2期)2020-03-12 10:34:06
阅读(快乐英语高年级)(2019年11期)2019-09-10 07:22:44
资源导刊(信息化测绘)(2019年11期)2019-01-03 23:15:28
趣味(语文)(2018年1期)2018-05-25 03:09:58
福建中学数学(2016年7期)2016-12-03 07:10:28
光学精密工程(2016年1期)2016-11-07 09:01:53
电测与仪表(2016年6期)2016-04-11 12:05:54
学苑创造·A版(2015年6期)2015-07-01 09:00:12