
双全回转舵桨拖船大幅度摆舵故障分析与排除
2021-08-04 08:11张拥军朱旭东糜艳军
中国修船 2021年3期
张拥军,朱旭东,糜艳军
(1.上海华润大东船务工程有限公司,上海 202155;2.上海船厂船舶有限公司,上海 202164)
某拖船由某船厂完全自主建造,该拖船采用2台2 940 kW全回转舵桨作为主推进动力和方向控制,全回转舵桨实物图见图1,故其舵桨具有舵和桨的双重功能,拖船可以在水平面内360°任意方向回转,提供360°全方位的推力输出,使船舶操作更加简单灵活,机动性能无限大[1]。

图1 全回转舵桨实物图
1 故障现象
经过多年的高强度使用,目前该拖船在运行过程中,时常发生摆舵现象(舵桨在全速运行时发生不受控的突然摆舵)。舵桨实际控制角的不受控偏离,严重影响了船体的稳定性,甚至可能会导致船体侧翻,存在着严重的安全隐患。同时操控性变差,给拖船的精确定位、长时间护航等工作带来了极大的不便和安全隐患。
2 故障分析与排除
2.1 工作原理
该拖船控制系统采用西门子S7-200系列PLC控制系统进行搭建,系统主要由操作手柄、主控柜、舵角传感器、舵角指示器、信号放大器和电磁阀及舵桨控制装置等单元组成,全回转舵桨控制原理如图2所示。主控柜是整套系统的核心,其作用是对外部接口送入的数据进行采集、分析处理,最后经运算后发出控制信号和指示信号给放大器和舵角指示器;操作手柄用于控制人员发出舵桨的操作信号给主控制器(主控柜)[2];舵角传感器用于采集舵桨当前的实际状态并送给主控柜;舵角指示器用于显示舵桨的当前状态;放大器用于放大来自主控柜的控制信号并送给电磁阀及舵桨控制装置;电磁阀及舵桨控制装置是执行机构,用于控制和推进舵桨。该系统的控制是一个典型的负反馈控制回路,系统将操作手柄给出的设定值信号与舵角传感器测得的实际值信号进行比较,如果2个值相等,则保持舵桨当前状态;如果有偏差,则由主控柜发出一纠偏信号给放大器,经控制放大器后,执行机构(电磁阀及舵桨控制装置)动作,直至偏差信号消失、设定值信号与舵角传感器测得的实际值一致为止[3-4]。
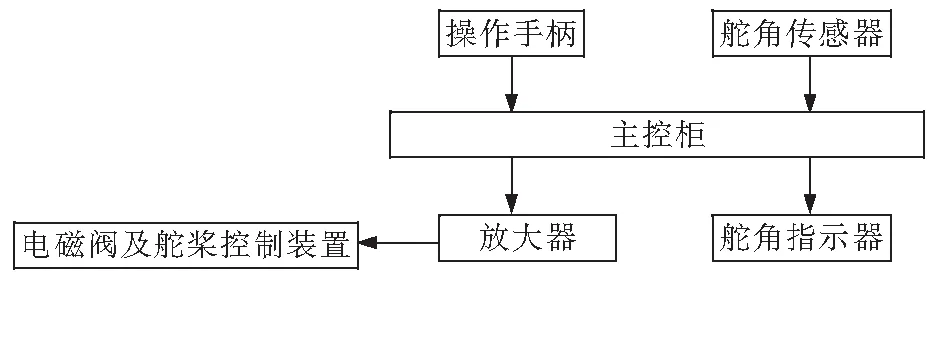
图2 全回转舵桨控制原理
2.2 故障分析
舵桨在全速运行时发生不受控的突然摆舵,初步判断是由于控制器受到了干扰信号引起的,根据干扰信号的来源,主要由以下3个方面引起。
1)操作手柄输入信号及舵角传感器信号受到干扰。操作手柄和舵角传感器的标准输出为4~20 mA的电流信号,但由于操作手柄与主控柜的距离较长(大概50 m),原先的安装是沿船体与电缆一起进行桥架、穿管敷设,因周边电缆有较多的交流强电信号,容易产生较大的交流电磁感性干扰,同时中间的信号输出线缆采用的是普通电缆,并非专用的信号屏蔽电缆。在无干扰的理想状态下,手柄和舵角的信号应该都是一条直线型控制线,而由示波器在现场实际测得的该类信号却是一条振幅和频率极不稳定的锯齿型噪声波[5]。
2)主控制程序的设计抗干扰能力弱。原主控制程序包含有对4~20 mA标准输入信号的一个主信号振幅的抗干扰处理,即当手柄信号输入变化值超过某一设定值时,将其确认为有效输入信号,否则将其视为干扰性无效信号而予以忽略。但是由于无法确定外界干扰信号的强度大小,以及对手柄操控灵敏度也有较高需求。所以当该值设定较大时,虽可以有效抑制干扰信号,但会引起手柄操纵的灵敏度下降;而当该值的设定较小时,虽可获得非常灵敏的手柄操纵性能,但对输入信号中的干扰信号过滤能力较差。故该原主控制程序的设计在信号的抗干扰和滤波的总体性能上比较差,虽进行过多次调试,仍无法满足抗干扰和操控实际需求。
3)信号放大器数值的调整不正确。信号放大器的作用主要有3个:第一是信号隔离作用,用于隔离执行机构电磁阀和PLC控制器的直接联系,保护PLC控制器的输入、输出电位;第二是信号的放大作用,由于PLC控制器输出的信号强度不大,需要由放大器将其放大后输出给执行机构,才能让执行机构直接动作;第三是放大器可以进行软控制输出(平滑输入输出)。信号放大器工作原理如图3所示,放大器动作有4个时间区间:最小值区间、加速区间、最大值区间和减速区间。最小值区间中对应的值是最小值,为电压启动值(触发动作值);最大值区间中对应的值是最大值,为输出电压的最大值;加速区间是从最小值加速到最大值的时间段(平滑上升);减速区间为最大值降到最小值的时间段(平滑下降)。所以通过放大器也可以很好地抑制干扰,但同样的,系统的抗干扰能力强了,其操控灵敏度必定会下降,所以将放大器调整到一个合适的范围值极其重要。当把操作手柄输入信号及舵角传感器信号的抗干扰和主控制程序的抗干扰设计完成后,就必须进行放大器性能的合理调试[6]。
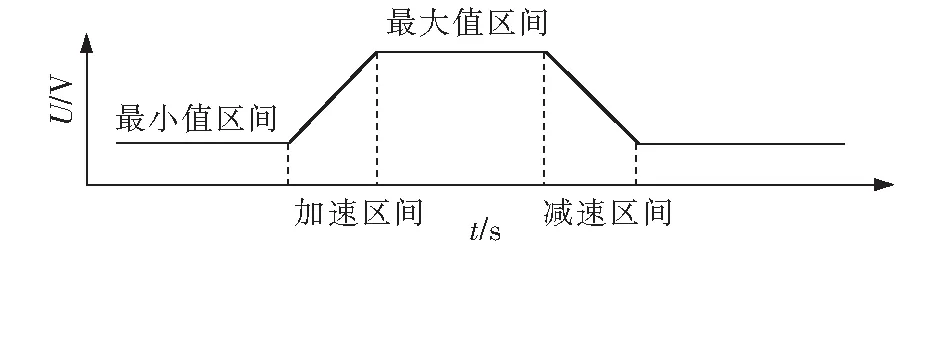
图3 信号放大器工作原理
2.3 故障排除
针对2.2中所提出的3个故障原因,分别采取以下措施进行消除和改进。
1)采用质量优良的屏蔽双绞线作为操作手柄与主控柜的信号传输线,并良好接地。采用屏蔽双绞线可以很好地减少环境电磁场对主通讯线路的干扰影响。根据现场实际情况,做好线路敷设,尽量避免与强电线路的伴行。如果确实无法避免,应采用十字交叉法、桥接等方法抗干扰[7]。
2)采用光纤替代传统线路传输。光纤的主要优点是:①传输距离长。依靠光纤作为传输介质传输光信号,由于光纤对光的衰减极小,抗干扰性强,无论在光纤周围盘绕着多么复杂的强电,信号传输速率始终保持不变,这使得光信号可传输的距离更长;②适应能力强。光传输使用的光纤不怕外界强电磁场的干扰,耐腐蚀,抗扰性强;③体积小、重量轻、便于施工和维护。光缆的敷设方式方便灵活,既可以直埋、管道敷设,又可以在水底和空中敷设。
上述1)、2)是针对干扰信号的来源进行了有效预防,对于实在无法从源头上预防的干扰信号,则采取了改进的软件过滤的办法。
3)主控软件抗干扰的改进设计。由于操作手柄和舵角传感器传输的是4~20 mA标准信号,其中的干扰信号是一条振幅、频率不稳定的锯齿波,原主控程序只采用了振幅滤波一个物理量进行软件抗干扰,振幅滤波原理示意图如图4所示。改进后则是在基于原程序的基础上,又增加单位时间稳定性第二个物理量的判断功能,振幅+单位时间滤波原理梯形示意图如图5所示[8]。2个物理量同时满足后,才确定主控程序的信号有效。通过这样的主控程序修改,既可以快速地判断信号的有效性,同时也可以缩短判断时间,增加操作信号的灵敏度。在PLC的RUDDER控制程序中,VW406起到振幅滤波的作用。新改进的程序中,在VW406单元后,串联了T33单元的单位时间滤波,从而有效地消除了干扰信号的影响。
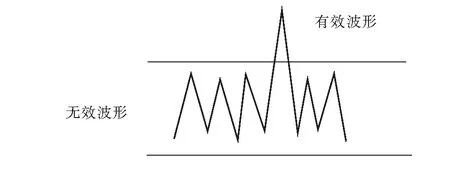
图4 振幅滤波原理示意图
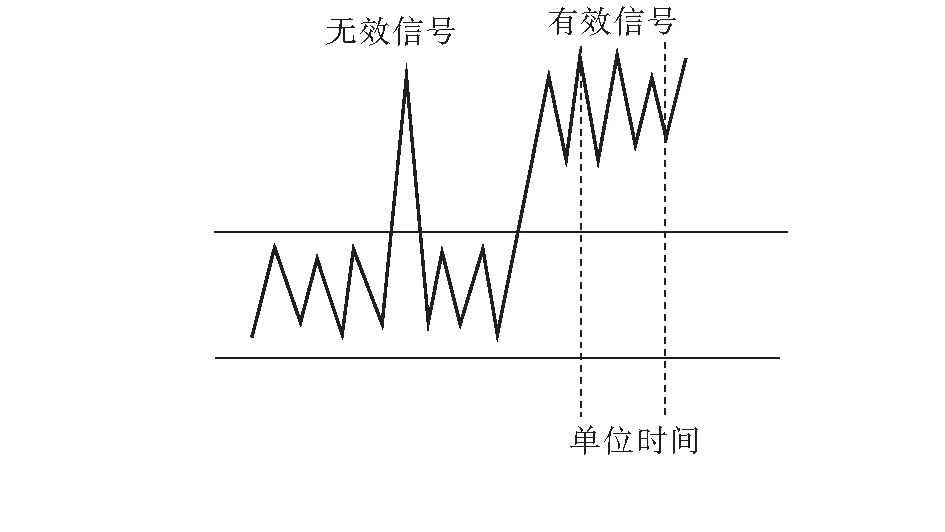
图5 振幅+单位时间滤波原理梯形示意图
4)信号放大器数值的正确调整。经过上述3项改进后,已可以满足99%的抗干扰要求。最后通过调整放大器的控制信号的斜率,即调整最小值和上升时间,让干扰信号产生的瞬间信号在上升时间的过程中达不到电磁阀动作的临界值,从而达到抗干扰的效果,干扰信号在上升时间中的位置如图6所示,同时需满足拖轮的操作使用要求。
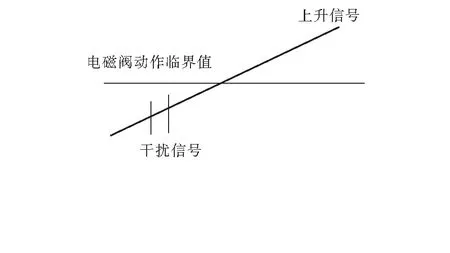
图6 干扰信号在上升时间中的位置
3 结束语
某拖船经过上述的硬件和软件上的抗干扰改造,实际运行后,不再产生突然摆舵现象,目前拖船运行平稳、安全。通过这次实船的改造,进一步了解了干扰在设备中带来的种种困扰及安全隐患,并对抗干扰的方法有了更加深入的、更加符合实际工况的了解,希望这些方法可以更好地服务于公司设备、船厂设备。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
舰船电子工程(2020年4期)2020-06-19
通信电源技术(2020年22期)2020-03-27
工业设计(2016年6期)2016-04-17
中国水运(2015年2期)2015-04-23
海军航空大学学报(2015年4期)2015-02-27
