引航中失控船舶的应急拖带分析
2020-12-01 08:56佘浩厦门港引航站
珠江水运 2020年21期
◎ 佘浩 厦门港引航站
1.引言
拖船所提供的力可对失去控制的船舶的速度与船首向进行有效控制,因此,有必要加强对引航中失控船舶应急拖带的研究,探寻更多的拖船应急拖带抢险方式,以便能够有效帮助失控船舶迅速恢复正常,维护好船舶上全体人员的生命财产安全。
2.引航中失控船舶的受力
为有效了解引航中失去控制的船舶自身受力情况,本文通过参考相关研究资料,并运用专业的工具软件,为船舶建立如图1所示的运动坐标系。依照船舶操纵运动方程,当处于拖船拖带作业时,可建立引航中失控船舶此时的运动模型,即有:

在上述公式当中,Ox轴与Oy轴方向上,拖船拖带过程中失控船舶产生的分力,各自用Fx与Fy进行表示,除拖船拖力外,两个轴方向上外力所产生的分力则分别表示为Fx0与Fy0。两个轴上失控船舶的加速度各为ax、ay。拖船拖力及其以外的外力,对Oz轴的力矩分别为NF与N,而绕该轴转动下船舶所产生的角加速度则为γ,船舶质量及其对轴的惯性力矩则分别表示为m与IZ。失控船舶受到除拖船拖力以外所产生的各种外力,且受力一定的情况下,绕Oz轴转动时船舶所受的力以及其沿着Ox轴与Oy轴方向做水平运动时所受的力,均取决于拖船拖力作用。力自身的大小与方向、Oy轴上分布的作用点则直接影响着拖船拖力对引航中失控船舶所产生的力的作用效果。
3.引航中失控船舶的应急拖带及应用分析
3.1 大中型船舶
3.1.1 基于空载状态
针对引航中失去控制的船舶,当船舶体型较大且处于空载状态时,拖船顶推不建议选择船尾干舷,而是需要选择在船尾的中央,否则在拖船拖带过程中,失控船舶产生大角度偏荡。具体来说,工作人员首先在设置于船首中央位置处的巴拿马导缆孔处,规范安设拖船带缆,用以带一艘拖船负责进行拖带抢险,令失控船舶重新获得前进动力,而该搜拖船也是主拖船。其次,需要将另一拖船带缆设置在船尾下风流舷侧,再带一艘拖船,为保障失控船舶行进方向与转向以及制动提供辅助,在该拖船的拖带作用下,失控船舶横移速度可以得到有效控制。最后,工作人员应当将拖船带缆设置在船首下风流舷侧,此时所带拖船将主要负责在引航中。对前进以及横向移动时的失控船舶的速度进行相应控制。其与船尾拖船协同合作,可以进一步有效操纵失控船舶正确完成保向或是转向。
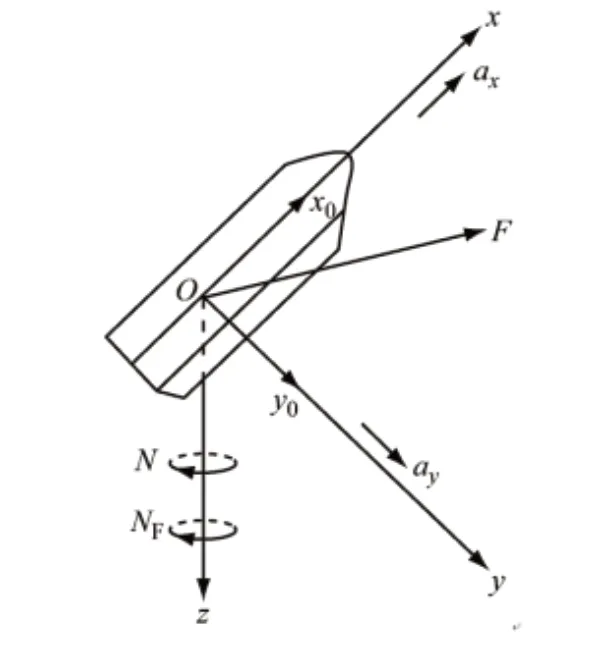
图1 船舶的运动坐标系示意图
值得注意的是,在拖船对失控船舶进行吊拖作业且在转向时,应当对连续转向角度进行严格控制,避免出现角度过大而加剧船舶失控。带拖缆时,则需要对其自带注意拖缆所带缆桩工作负荷予以充分考量。为拖船即将与失控船舶相靠近时,可以在最短时间内规范完成带拖缆,失控船舶在等待拖船抵达期间内,需要依照拖船实际带缆位置提前备好多根缆绳。必要时,失控船舶也可以选择采用抛单、双锚的方式对船位进行有效稳定,以便拖船能够顺利靠近失控船舶,并为后续拖船救援创造良好条件。
3.1.2 基于满载状态
针对引航中失去控制的船舶,当船舶体型较大且处于满空载状态时,同样需要采用至少三条拖船相互配合,共同完成引航作业。与空载状态下的大中型船舶不同的是,当其处于满载状态且需要进行拖船拖带时,拖船顶推位置应当与船尾干舷保持一致。而在设置拖船带缆时,工作人员首先需要船尾中间处设拖船带缆,用以带一艘拖船,对准失控船舶的船尾干舷位置处进行顶推,使得原本失去控制的船舶能够重新获得动力。其次,工作人员需要将拖船带缆设置在船尾下风流舷侧,此时在拖船拖带作用下,失控船舶可以有效实现保向和转向,其横移速度同样也能够得到相应控制。最后,工作人员应当将拖船带缆设置在船首下风流舷侧,该处所带拖船不仅负责对横移运动时的失控船舶运动速度进行有效控制,同时其与剩余拖船尤其是船尾拖船相互配合,也能够顺利操纵失控船舶精准完成保向与转向。工作人员在实际操纵拖带的过程中,需高度重视对拖带失控船舶的速度的控制,特别是将拖船设置在船首位置处进行倒拖时,应当对负责倒拖的拖船操纵性能予以充分考虑。对于失去控制且处于满载状态的大中型船舶,工作人员在船首处设置拖船时应动作迅速,以便能够提早对失控船舶进行有效控制。
等待拖船靠近时的失控船舶,立即将自身动态及时发布给VTS以及其它过往船舶,且需要失控船舶对其号灯与号型进行精准显示。在船舶体型较大且处于满载状态下,需要采用多艘拖船相互配和,协同完成对失控船舶的应急拖带。在此过程中,工作人员需要密切观察拖船顶拖位置,避免其之间互相干扰,从而增加拖船出现危险的可能性,使得拖船在有效操纵失控船舶中的效用得以发挥至最大。
3.2 小微型船舶
3.2.1 基于空载状态
针对引航中失去控制的船舶,当船舶体型较小且处于满空载状态时,从理论上来说可以采用一艘拖船完成拖带,但为了能够确保拖船顺利操纵失控船舶,本文仍然建议采用多搜拖船相互协助进行拖带的作业方式。对于空载状态下的小微型船舶,在拖船拖带过程中,工作人员可直接选择船舶的船尾干舷位置进行拖船顶推。在设置拖船带缆时,工作人员首先将拖船带缆安设在船尾中间,用以带一艘拖船,该拖船作为主拖船负责对准失控船舶船尾干舷位置进行顶推,使得失控船舶可以重获动力从而顺利前进。其次,工作人员还需将拖船带缆设置在船首下风流舷侧,该处所带拖船需要为失控船舶实现保向和转向提供必要辅助作用,并达到对失控船舶在横移时的速度进行有效控制的目的。这主要是由于拖船在逐渐与失控船舶相靠近并最终靠泊后,呈90°对失控船舶船首处进行拖曳,由此产生的力可以对失控船舶船首在进行快速横向移动时,起到一定减速作用。对引航中的小微型船舶,在对其进行应急拖带的过程中,需要对失控船舶自身船体强度予以高度重视,当拖船拖带用力超过船体自身强度时,将极易导致失控船舶船体被破坏,并对船上人员的生命财产安全造成极大威胁。
3.2.2 基于满载状态
针对引航中失去控制的船舶,当船舶体型较小且处于满载状态时,应当采用至少两条拖船完成拖带作业。此时处于满载状态下的小微型船舶,其在失控情况下,拖船不应选择船舶的船尾干舷进行顶推,否则容易导致船舶出现偏荡,且偏荡角度相对较大。在设置拖船带缆的过程中,与处于满载状态下的大中型船舶相似,工作人员同样首先需要在船尾中间处设拖船带缆,用以带一艘拖船,要求该拖船对准失控船舶的船尾干舷位置处进行顶推,使得原本失去控制的船舶能够重新获得动力。其次,工作人员需要将拖船带缆设置在船尾下风流舷侧,此时在拖船拖带作用下,失控船舶可以顺利操纵船体保向和转向,其横移速度同样也能够得到相应控制。这主要是由于当拖船拖力值与具体方向一定,力矩值直接取决于拖船拖力作用点,通常处于行进状态的船舶,其转心位于船首至船中范围内,拖船在船首两舷侧时,其对转心的力臂明显短于拖船在船尾两舷侧时,由此增大了力矩,可有效达到拖船操纵失控船舶实现保向与转向的效果。同样,如果失控船舶向后退,工作人员应当将主拖船设置在船首位置处,由此获得更加理想的失控船舶保向与转向效果。但在实际进行拖船顶推时,相关工作人员需要充分考虑失控船舶自身承载情况,并对拖船缆绳强度予以相应考量,确保拖船拖曳力比其顶推力要小,否则也难以充分发挥拖船顶推的应有效用。
4.结束语
综上所述,在引航中拖船应急拖带对失控船舶的速度、方向等均具有一定的控制作用,有助于失控船舶更好地完成保向与转向操纵。在具体操作时,需要工作人员对失控船舶以及拖船自身的实际情况及其拖带要求予以全面考量,在认真遵循相关作业规范要求后,合理设置拖船与拖带缆绳位置,并尽可能选用多条拖船相互协同、配合作业的工作模式,从而有效完成对失控船舶正确引航,保障船舶营运安全可靠。
猜你喜欢
花火·慧阅读(2022年6期)2022-05-19
水上消防(2021年4期)2021-11-05
兵器装备工程学报(2021年9期)2021-10-15
机械与电子(2020年10期)2020-10-22
东坡赤壁诗词(2018年3期)2018-07-16
中国船检(2018年3期)2018-03-29
中国军转民(2017年9期)2017-12-19
舰船科学技术(2016年1期)2016-02-27
河南科技(2014年22期)2014-02-27
船海工程(2013年6期)2013-03-11