
腹腔镜稳定跟踪系统与腹腔镜操作助手在手术中的有效性以及安全性的对比研究
2021-08-02 09:53王世军周莲娥万安霞康保华
河北医学 2021年7期
王 轩,王世军,周莲娥,万安霞,康保华
(首都医科大学宣武医院妇产科, 北京 西城区 100053)
腹部拥有着诸多重要脏器,是人体主要部位之一[1]。腹部手术常被用于多种腹部脏器以及妇产科疾病的临床治疗中,但腹部脏器多、血管以及神经分布,在一定程度上加大了手术难度[2]。腹腔镜微创手术技术以其鲜明的优点成为20世纪外科手术领域的一项重大变革,其具备切口小、术野广阔清晰、对血管以及神经损伤小、术后恢复快等多项优势[3,4]。但微创手术操作过程中,操作者需要和助手共同操作手术器械以及腹腔镜,这对操作者和助手的协调性要求较高,并且受助手因素影响,可能会导致输出图像不稳定、腹腔镜末端镜头被污染等意外事件的发生[5,6]。为了克服人工协作微创手术存在的这些缺点,以色列M.S.T.Medical Surgery Technologies.LTD研发、生产了腹腔镜稳定跟踪系统,用以替代人工操作助手的工作,理论上能够在一定程度上避免了因助手主观因素对腹腔镜手术所产生的不利影响[7]。但腹腔镜稳定跟踪系统临床可实践性还有待进一步证实。本次研究对首都医科大学宣武医院妇产科、北京大学人民医院胃肠外科和妇产科、北京大学第三医院普通外科进行治疗的腹部微创手术的96例患者分别应用了腹腔镜稳定跟踪系统与腹腔镜操作助手,旨在对比其临床实际运用价值,现报道如下。
1 资料与方法
1.1一般资料:选取于2019年1月29日至2019年12月14日在由首都医科大学宣武医院妇产科、北京大学人民医院胃肠外科和妇产科、北京大学第三医院普通外科进行治疗的腹腔镜微创手术患者100例为研究对象,按照中央随机法分为研究组(n=50)和对照组(n=50),剔除不符合纳入标准的病例和脱落病例,研究组剔除0例,脱落1例,实际完成49例,对照组剔除2例,脱落2例,实际完成46例。其中研究组(n=49)男10例,女39例,平均年龄(42.38±4.38)岁,平均BMI(23.49±2.53)kg/m2;对照组(n=46)男11例,女35例;平均年龄分别为(42.33±4.35)岁;平均BMI(23.54±2.57)kg/m2。两组间在年龄、性别、BMI值方面差异均无统计学意义,P>0.05。该项研究已提前征得患者同意,且均已签署知情同意书。
1.2纳入和排除标准:纳入标准:①患者年龄为18~75周岁之间,男女不限;②拟行腹腔镜手术的患者;③患者临床资料完整;④患者无明显手术禁忌症;⑤患者治疗依从性较高,配合度较好。排除标准:①患有复发性脑梗死、先天性免疫缺陷、其他恶性肿瘤者;②患有精神类疾病,精神状况不佳患者;③合并气腹禁忌症、弥漫性腹膜炎患者;④广泛粘连无法行腹腔镜手术的患者;⑤肥胖患者(BMI>32.5kg/m2);⑥3个月内参加其他临床试验的患者。
1.3方法:本试验采用随机、开放、对照、多中心的试验方法,由专业及经过培训的医疗人员实施。采用中央随机法选择试验对象,分配病人进入试验组或对照组。研究组由术者操控腹腔镜稳定跟踪系统来控制腹腔镜移动,对照组由腹腔镜操作助手控制腹腔镜。每位受试者的试验时间为手术实施时间及术后随访7~10d。
1.4观察指标:有效性结果:①使用ImageStabilityCalculatorAPP进行图像稳定性分析,利用快匹配方法,计算两帧毗邻视频画面的移动速度,该算法用于分析腹腔镜固定时的小幅度移动,基于全数据集(FAS)和符合方案集(PPS)对两组患者手术过程中腹腔镜取出清洁的次数以及图形稳定性进行分析;②手术医生对机械操作评价:设计表格对两组医师在操作的灵活有效性、使用舒适性以及改善手术效率方面的满意度进行评价,分为不满意、一般、满意和非常满意4个等级。安全性分析:①两组患者术后不良反应发生情况;②两组患者术后切口愈合情况:愈合良好为切口愈合面积≥75%;愈合不良为切口愈合面积<75%。

2 结 果
2.1一般资料:两组患者的性别、平均年龄、BMI、入选科室、糖尿病病史、高血压病史之间的差异无统计学意义(P>0.05),具有可比性,见表1。

表1 两组患者的一般资料对比n(%)
2.2有效性结果:FAS分析、PPS分析结果显示,研究组患者手术过程中腹腔镜取出清洁的次数以及图形稳定性均明显优于对照组且差异具有统计学意义(P<0.05),见表2。腹腔镜稳定跟踪系统辅助下的腹腔镜微创手术的图形稳定性以及腹腔镜取出清洁的次数明显优于操作助手协助。
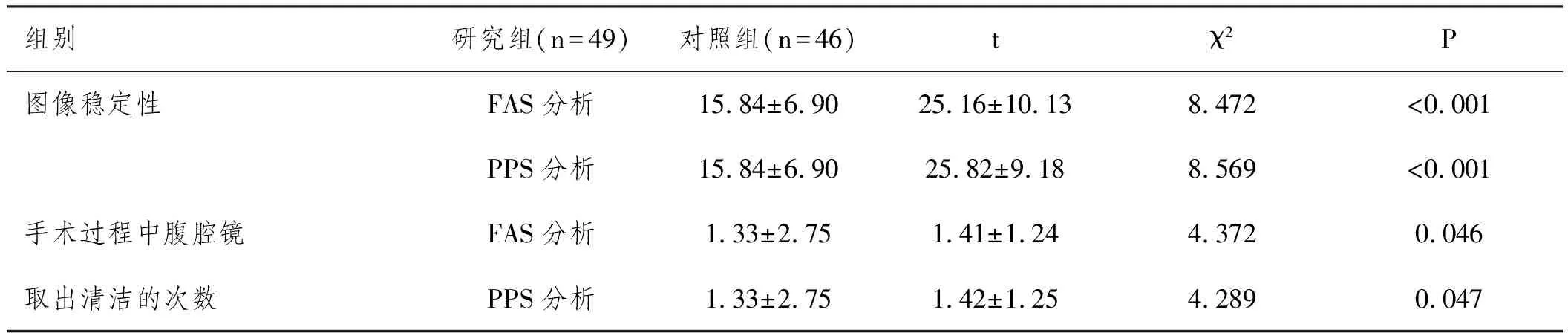
表2 两组患者操作的有效性分析
2.3手术医生对机械操作评价:研究结果显示,两组患者在操作的灵活有效性、使用舒适性以及改善手术效率方面的总满意度的之间的差异无统计学意义(P>0.05),见表3。手术操作者对腹腔镜稳定跟踪系统和腹腔镜操作助手协助下的腹腔镜微创手术的操作满意度之间无明显差异。
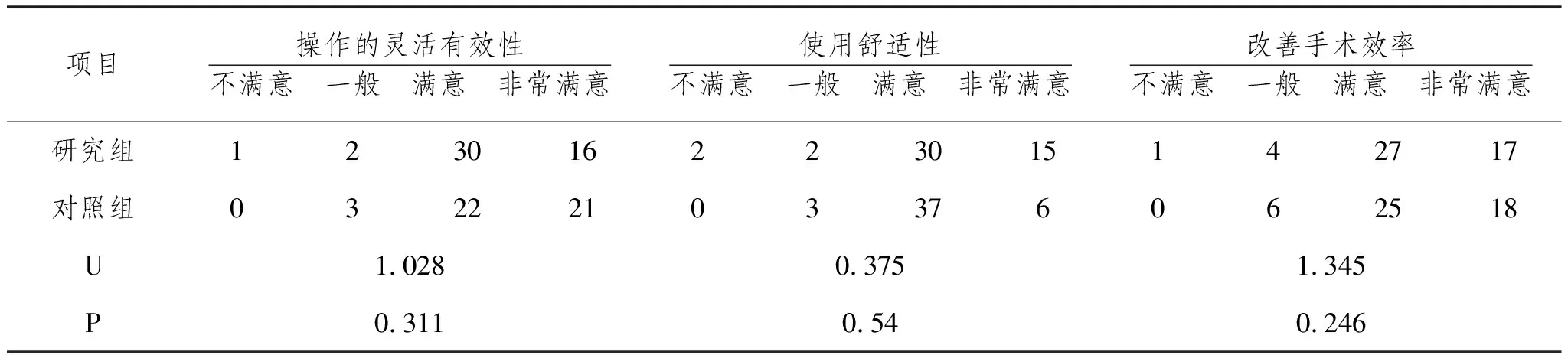
表3 手术医生对两组患者机械操作评价满意度
2.4不良事件发生情况:两组患者术后各项不良事件的发生率的差异均不具有统计学意义(P>0.05),见表4。腹腔镜稳定跟踪系统和腹腔镜操作助手协助下的腹腔镜微创手术患者术后均未因器材因素发生明显并发症。
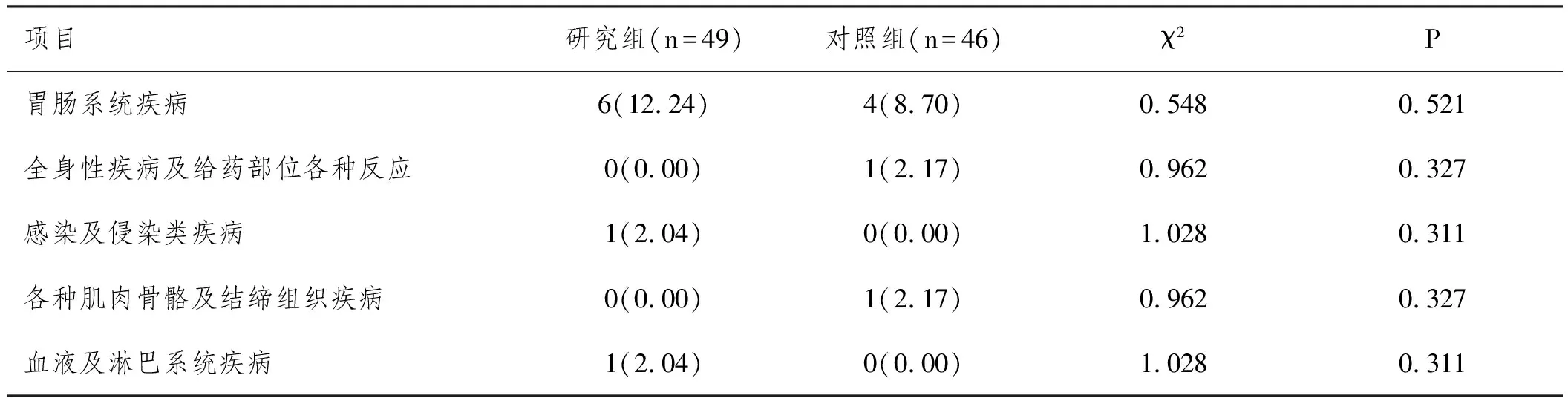
表4 两组患者不良事件发生情况对比n(%)
2.5切口愈合情况:两组患者术后第1天、第2天以及第7~10天的切口愈合良好率之间的差异无统计学意义(P>0.05),见表5。腹腔镜稳定跟踪系统和腹腔镜操作助手协助下的腹腔镜微创手术患者术后创伤愈合率均较高。

表5 两组患者术后各时点切口愈合情况n(%)
3 讨 论
近年来,随着微创技术的发展,腹腔镜微创手术已被广泛运用于腹部脏器疾病或妇科疾病的手术操作中。但腹腔镜常需助手配合操作,稳定性可能会因此受影响[8]。为了克服因人工因素可能对腹腔镜微创手术造成的不利影响,多个国家均研发了机器人主动扶镜系统,例如美国直觉手术公司(Intuitive Surgical,Inc.)的AESOPTM系统,比利时Medsys S.A的LapManTM系统等。相比之下,以色列M.S.T.Medical Surgery Technologies.LTD研发生产的腹腔镜稳定跟踪系统(AutoLapTM)运用了两种控制模式,不仅能够做垂直移动,还能够跟随竖着的手术器械进行前后左右移动[9]。本次研究对我院行腹部微创手术的95例患者分别应用了腹腔镜稳定跟踪系统与腹腔镜操作助手。
本试验采用随机、开放、对照、多中心的试验方法,由三家医院的四个研究中心专业且经过培训的医疗人员实施,研究组采用腹腔镜稳定跟踪系统控制腹腔镜移动,对照组使用腹腔镜操作助手。术式选择以胆囊切除手术和卵巢囊肿剥离占比最高,其次为双侧卵巢切除术和单侧卵巢切除术。本研究所选案例较为全面,能够代表普外科以及妇产科较为常见和典型的腹腔镜微创手术。
研究采用ImageStabilityCalculatorAPP对图像稳定性进行分析,结果显示,研究组患者手术视频图像的稳定性明显优于对照组,加强腹腔镜手术视频稳定性有利于促进手术顺利进行,并减少因图像问题所导致的意外事件的发生。杨鋆等学者[10]研究显示,腹腔镜微创手术操作过程中,约有7%时间是用于清洁腹腔镜镜头,而频繁取出镜头清洁会影响手术的流畅性,增加手术时间。本研究中,研究组患者镜头清洁次数明显较对照组偏少,这将有利于促进提升手术的流畅性,改善手术效果。
本研究利用问卷表对手术医生的操作灵活有效性、使用舒适性以及改善手术效率方面进行了调查,结果显示,两组间均无明显差异。相对于腹腔镜操作助手,腹腔镜稳定跟踪系统并不会导致手术医生的操作体验下降,影响手术顺利进行。手术期间,研究组共计8例患者(16.33%),对照组共计6例患者(13.04%)发生了不同的不良事件。而所有的不良事件均与试验器械无关,未出现导致脱落的不良事件。手术期间,研究组和对照组均未发生严重不良事件。研究组有1例出现器械故障,表现为手指遥控不灵敏,更换遥控器后顺利完成手术。腹腔镜稳定跟踪系统在以往的多项非随机对照研究中,鲜有案例手术发生器械故障和器械相关的不良事件,显示该系统有较好的安全性和稳定性。而在术后伤口愈合情况中,两组之间也未见明显差异。腹腔镜稳定跟踪系统和腹腔镜操作助手协助下的腹腔镜微创手术患者术后创伤愈合率均较高。
综上所述,与腹腔镜操作助手相比,腹腔镜稳定跟踪系统获得的视频图像稳定性明显偏优,腹腔镜取出清洁次数偏少,并且术者的操作满意度以及术后患者病情恢复则不亚于腹腔镜操作助手,具有较好的有效性和安全性。本研究尚存在一些不足之处,腹腔镜稳定跟踪系统需对操作者进行培训,操作者的技能掌握程度可对操作过程产生影响,而腹腔镜操作助手的经验和技能水平也可对实验结果产生影响,今后的研究中可以增加实验患者数量,以降低操作者的个人因素对研究结果产生影响。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
保健医苑(2022年1期)2022-08-30
中华养生保健(2020年4期)2020-11-16
中华养生保健(2020年3期)2020-11-16
人大建设(2019年10期)2019-12-27
人大建设(2019年3期)2019-07-13
腹腔镜外科杂志(2016年10期)2016-06-01
腹腔镜外科杂志(2016年10期)2016-06-01
阅读与作文(小学低年级版)(2016年3期)2016-03-08
少儿科学周刊·儿童版(2015年2期)2015-07-07
