基于随机速度伺服控制的车门耐久试验研究
2021-08-02 11:38周贤文张德俊
合肥工业大学学报(自然科学版) 2021年7期
周贤文, 张德俊, 顾 伟
(上海海事大学 航运技术与控制工程交通行业重点实验室,上海 201306)
车门作为汽车的重要部件之一,直接关系乘员的安全性和舒适度。为保证车门的使用寿命和质量,一般汽车在投入市场前要经过疲劳试验。非营运载客车辆在使用年限内的车门开关次数约为65 700次[1]。车门耐久试验中一般采用1.2 m/s或1.5 m/s开闭速度、105次耐久次数作为通用标准,得出车门间隙面差数据并进行分析,从而得到试验结果。常规试验采用气缸为执行器,由于气体热胀冷缩的性质,气缸在高、低温条件下很难正常工作[2],并且人开闭车门的速度也各不相同,而采用同一速度开闭车门得出的试验结果与实际使用状态也不尽相同。
针对上述问题,本文提出了一种基于随机速度的车门疲劳试验方法。采用交流伺服系统,以伺服电缸为执行器,设计速度和位移给定信号发生器,采用自抗扰位置控制器进行位置控制;从融合布谷鸟算法和遗传算法、设计非线性惯性权重系数、设计非线性加速因子3个方面改进粒子群算法(particle swarm optimization,PSO),并采用该算法整定控制器参数,通过仿真验证算法的搜索性能和系统的控制特性。采用随机速度方法分别在高温、低温、常温和高温高湿条件下进行105次试验,得出车门间隙面差数据,并与定值速度试验方法的结果进行分析对比。
1 伺服控制系统
车门耐久试验利用一台控制器完成,试验装置包括机械台架、伺服系统和计算机检测控制系统。试验装置执行机构采用模块化设计,各模块可独立工作,实现不同的组合满足试验需要。采用伺服电缸作为执行器,通过组合式型材底座固定在机械台架上,可以实现快速安装或拆卸。
车门耐久试验装置伺服系统原理如图1所示。试验通过上位机向伺服驱动器发出给定信号,伺服电缸执行相应工作。
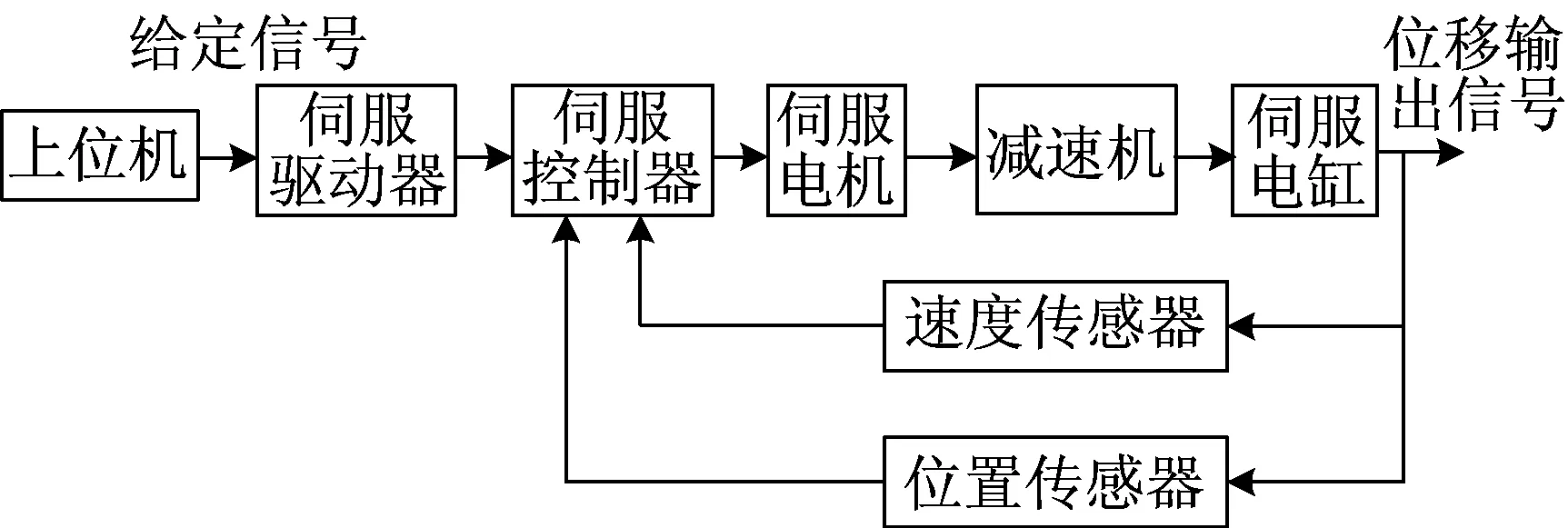
图1 车门耐久试验装置伺服系统原理
车门耐久试验装置搭载T60系列伺服电缸,实现的最大速度为2.5 m/s、最大行程长度为1 500 mm,使用的电机为B63Q系列电机,系统参数见表1所列。

表1 系统参数
采用id=0矢量控制[3]得到电机传递函数。伺服电缸机械部分可将其等效为质量-弹簧-阻尼系统[4],经拉式变换求得传递函数G1(s)。速度传感器用于检测速度值变化,判断速度是否达到给定值,测速范围0~3 m/s,精度±1%FS。
根据实际使用的伺服电机和伺服电缸参数,以电压U为输入,丝杠位移X(s)为输出,搭建伺服系统数学模型[5],以此作为仿真的基础,车门耐久试验装置伺服系统传递函数框图如图2所示。

图2 车门耐久试验装置伺服系统传递函数框图
2 速度/位移信号发生器设计
速度/位移信号发生器的设计分为速度/位移给定信号设计、速度控制与位置控制切换2个部分,结构如图3所示。
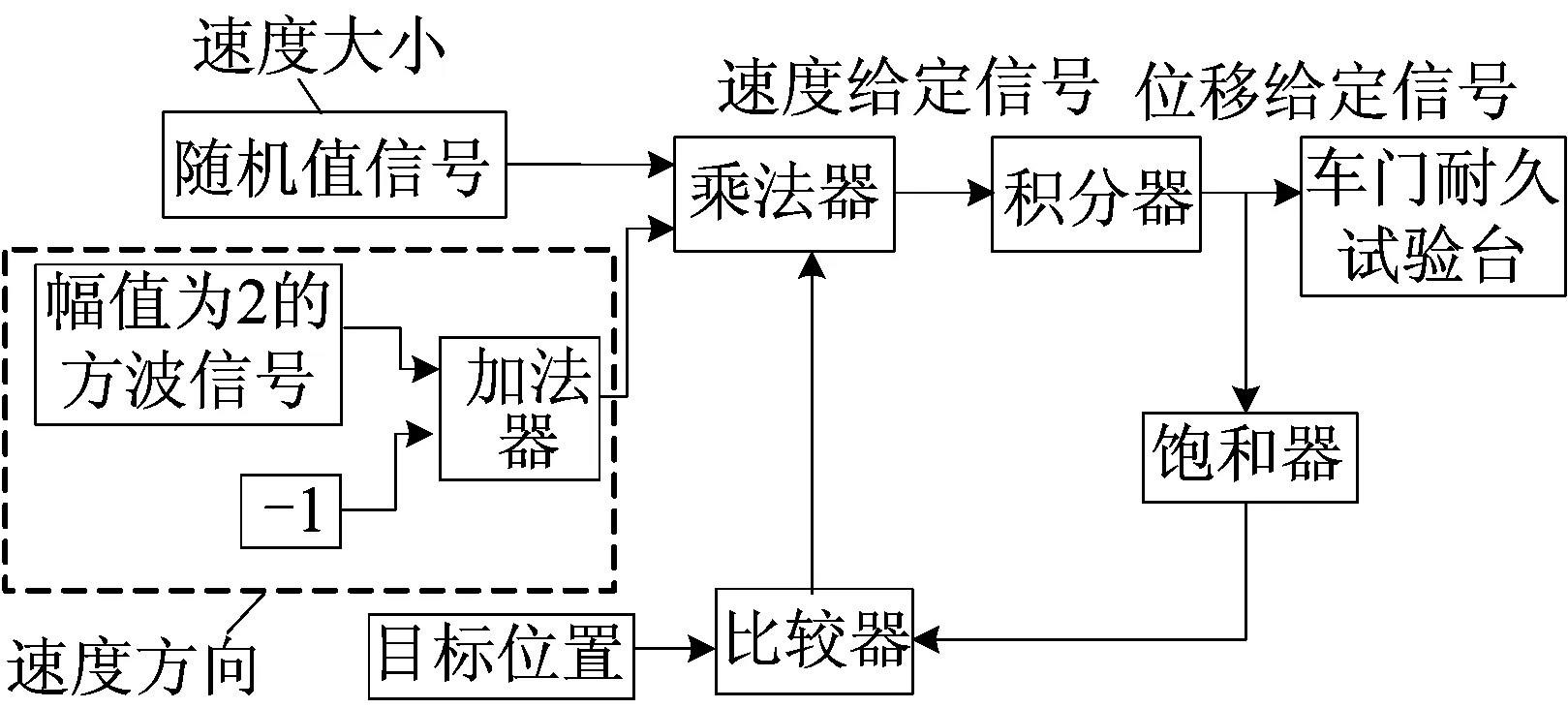
图3 给定信号发生器的结构
车门的开闭速度在1~2 m/s之间随机产生,伺服电缸带动车门运动的位移为1 m,试验频率为5 次/min。
(1) 速度和位移给定信号设计。速度给定信号的设计包括速度大小和速度方向。根据常规试验各速度下试验次数的分布,将速度大小信号设计为1~2 m/s之间呈正态分布的随机信号,均值u=1.5,标准差σ=1.16,采样时间为12 s,速度分布如图4所示;速度方向采用幅值为±1、周期为12 s、占空比为50%的方波信号。将速度大小和速度方向作为乘法器的输入,则输出即为速度给定信号。位移给定信号采用速度给定信号的积分表示,将位置跟踪误差保持在较小的范围,防止对速度控制产生影响[6]。

图4 试验速度分布
(2) 速度控制和位置控制的切换。试验装置完成1次试验的周期为12 s,分为开启(速度为正)、开启保持(位移为1 m)、关闭(速度为负)、关闭保持(位移为0 m)4个阶段,在开启和关闭阶段速度控制起主要作用,在2个保持阶段位置控制起主要作用。用幅值为1、周期为12 s、占空比为50%的方波信号模拟目标位置,将目标位置信号与位置给定信号作为比较器的输入。在车门开启和关闭过程中若位置给定信号与目标位置差值不为0,则比较器输出1,此时速度控制起主要作用;在保持阶段若位置给定信号达到目标位置,则比较器输出0,此时速度给定信号为0,位置控制起主要作用。将速度给定信号和比较器输出作为乘法器的输入,通过比较器的输出完成速度控制和位置控制的切换。
速度和位移给定信号如图5所示。

图5 速度和位移给定信号
3 控制器设计
试验装置在运行过程中存在非线性和车门负载变化频繁的问题,负载的突变会引起速度震荡,从而影响定位精度,且对于试验装置这类工作时间长的设备,会影响执行机构(伺服电缸)的使用寿命[7]。
自抗扰控制器具有精度高、响应快、鲁棒性强等优点,采用改进的粒子群算法(improved particle swarm optimization,IPSO)整定控制器参数,系统的速度控制和位置控制均可取得良好的控制效果。
3.1 二阶自抗扰控制器
自抗扰控制器结构如图6所示,包括非线性跟踪微分器(nonlinear tracking differentiator,NTD)、扩张状态观测器(extended state observer,ESO)、非线性状态误差反馈控制律(nonlinear state error feedback control law,NLESF)3个部分。
图6中:yd(t)为给定信号;y(t)为实际输出;n(t)为系统干扰信号。
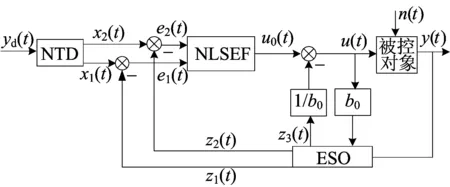
图6 二阶自抗扰控制器原理
NTD的作用是为控制系统提取连续信号和微分信号,解决系统位置跟踪快速性和超调之间的矛盾,当给定信号发生突变时,抑制其波动。给定信号yd(t)经过NTD时可得到连续信号yd(k)和微分信号yd′(k),x1(k)、x2(k)分别为其跟踪信号。
将NTD离散化可得:
x1(k+1)=x1(k)+hx2(k),
x2(k+1)=x2(k)+
hfk(x1(k)-yd(k),x2(k),r,h0)
(1)
其中:h0为滤波因子;h为积分步长;r为速度因子;fk()为最速控制函数。
fk()的表达式为:
fk(x1(k),x2(k),r,h)=

(2)
其中
y(k)=x1(k)+hx2(k);
d=rh;d0=dh。
ESO通过测量系统给定输入信号和输出信号获得系统状态变量的估计值,z1(k)、z2(k)分别跟踪yd(k)、yd′(k),z3(k)为系统内外扰动的估计值。
ESO的离散形式为:
e(k)=z1(k)-y(k),
z1(k+1)=z1(k)-h[z2(k)-β01e(k)],
z2(k+1)=z2(k)+h[z3(k)-
β02fal(e(k),α1,δ0)+b0u(k)],
z3(k+1)=z3(k)-hβ03fal(e(k),α2,δ0)
(3)
其中:α1、α2为非线性因子;β01、β02、β03为系统误差校正增益;δ0为平滑滤波因子;fal()为非线性函数。
fal()的表达式为:
fal(e(k),α,δ)=
(4)
通过x1(k)和z1(k)可求得过渡过程的误差信号e1(k),通过x2(k)和z2(k)可求得过渡过程的误差微分信号e2(k)。
NLSEF的离散形式为:
e1(k+1)=x1(k+1)-z1(k+1),
e2(k+1)=x2(k+1)-z2(k+1),
u0(k+1)=β1fal(e1(k+1),α3,δ0)+
β2fal(e2(k+1),α4,δ0)
(5)
其中,β1、β2为误差比例增益。
则可求得指令信号u(k)=u0(k)-[z3(k)]/b0,实现位置控制。
在二阶自抗扰控制器中存在众多参数,其中β01、β02、β03、β1、β25个参数由于存在相互作用且分布范围大,需综合考虑对系统的影响。为了使系统获得最优的控制效果,本文提出一种IPSO算法整定上述参数。
3.2 IPSO算法
PSO算法的基本思想是在D维的搜索空间中,m个粒子组成一个种群,第i个粒子的位置经过t次迭代后,粒子的速度和位置更新公式为:
vt+1=wvt+c1r1(Pt-xt)+
c2r2(Gt-xt)
(6)
xt+1=xt+vt+1
(7)
其中:w为惯性权重因子;c1、c2为非负的加速因子;r1、r2为[0,1]区间的随机数;Pt为粒子的历史最优位置;Gt为种群的历史最优位置。
PSO算法在复杂系统的搜索过程容易陷入局部最优。为了提高算法搜索能力,可通过设置动态惯性权重系数[8]、引入扰动算子[9]、与其他技术融合[10]等方法对基本PSO进行改进。
本文IPSO算法引入布谷鸟算法中的levy飞行和遗传算法中的选择算子。在算法开始时,使用levy飞行产生一组新的后代,粒子速度保持不变,位置更新公式为:
xt+1=xt+α·SL⊗(xt-xb)⊗r
(8)
其中:SL服从D维levy分布[11];r在(0,1)区间内服从正态分布;xb为历史最优解;α为步长因子,取α=(bu-bl)/200,bu、bl分别为可行区间的上、下限。
分别计算2组粒子群的适应度值并排序,通过遗传算法中的选择操作,选择2组粒子群中适应度较高的50%组成新的种群,在保证种群数目的同时,提高搜索效率和多样性。
采用非线性递减的惯性权重系数提高算法的寻优效率,用wmax、wmin分别表示惯性权重系数的最大值和最小值,根据文献[12],取wmax=0.9,wmin=0.4。则第t次迭代的惯性权重系数表达式为:
w(t)=wmax-(wmax-wmin)(t/T)t
(9)
其中:T为最大迭代次数;t为当前迭代次数。
由(6)式可知,PSO算法的速度和位置更新与加速因子c1、c2有关,搜索前期为避免算法过早收敛,取较大c1和较小c2;后期局部搜索时为保证寻优的精确,应逐渐减小c1并增大c2。由此将加速因子设置为:
c1=a[w(t)-0.4]+b,
c2=c[w(t)-0.4]+d
(10)
其中,a、b、c、d均为待定常数。
根据文献[13],取c1,c2∈[0.5,2.5],可求出加速因子的表达式为:
c1(t)=4w(t)-1.1,
c2(t)=-4w(t)+4.1
(11)
则IPSO算法速度和位置更新方程为:
vt+1=w(t)vt+c1(t)r1(Pt-xt)+
c2(t)r2(Gt-xt)
(12)
xt+1=xt+vt+1
(13)
IPSO算法的工作流程如图7所示。
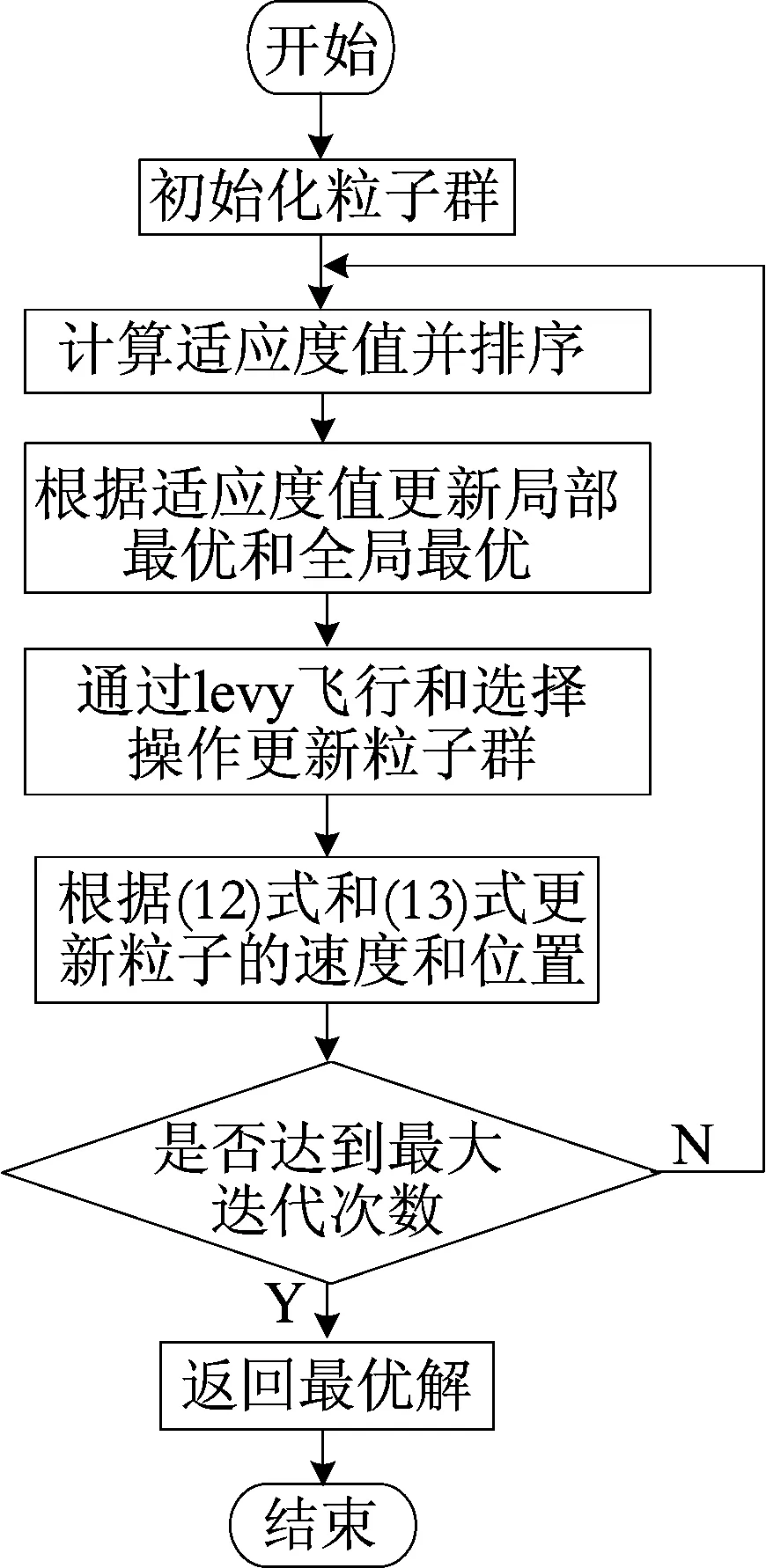
图7 IPSO算法流程
3.3 适应度函数
适应度函数采用时间乘绝对误差积分准则,在实际中,若车门位移超过车门开启的极限位置则会造成损坏,无法得到准确的试验结果,因此将超调量M作为指标考虑到适应度函数中。将适应度函数设计为:

(14)
其中,wM为权重系数,且wM>0。
系统算法结构如图8所示。
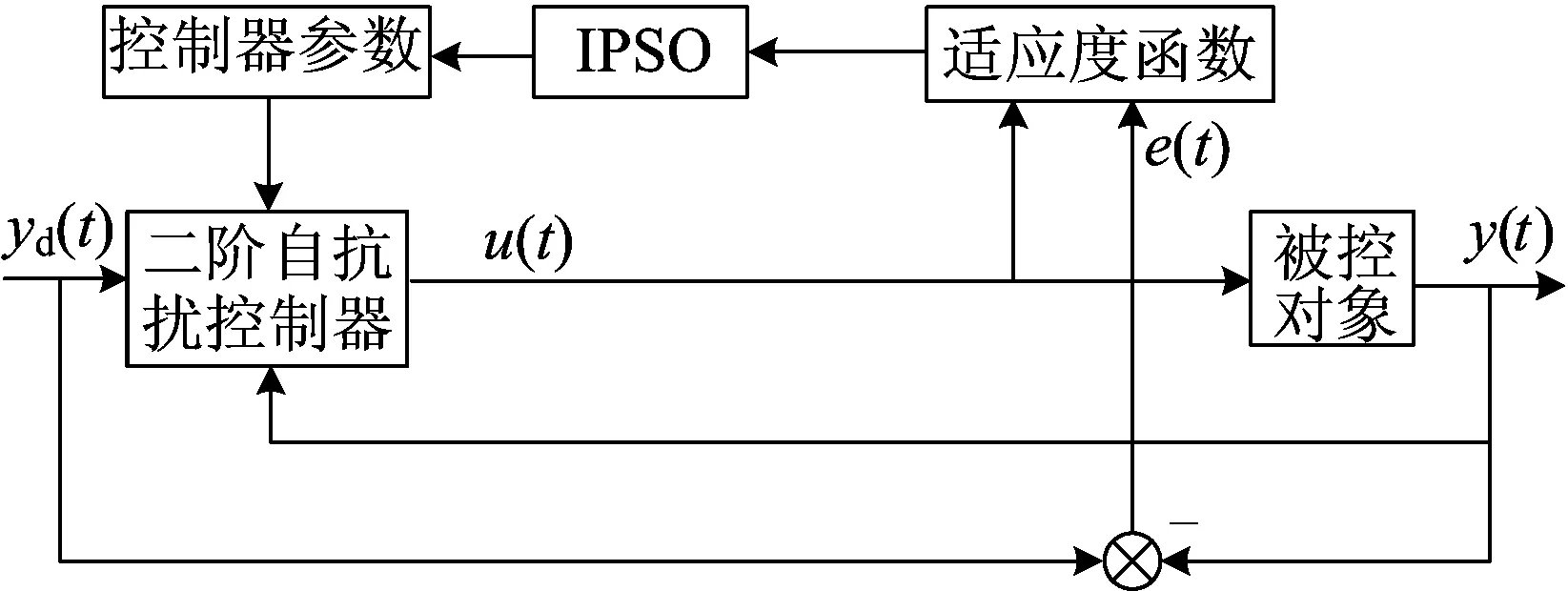
图8 系统算法结构
4 实验仿真与分析
4.1 仿真参数设置
利用Matlab/Simulink进行仿真实验,仿真步长设置为0.1 ms。以速度和位移信号发生器作为给定信号输入,验证系统的性能。在IPSO中,设置维度为5,对应二阶自抗扰控制器的5个参数。
搜索范围设置如下:β01∈[0,500],β02∈[0,62 500],β03∈[0,70 000],β1∈[0,500],β2∈[0,10];种群规模为20;迭代次数为50。
控制器其他参数设置如下:h=0.001,h0=0.1;r=1 000;α1=0.5,α2=0.25,α3=0.5,α4=0.125;δ0=0.01;Ka=0.183。
4.2 仿真结果分析
将速度和位移信号发生器信号作为系统输入,采用IPSO算法和PSO算法整定控制器参数,得到整定过程中的适应度函数变化曲线,如图9所示。
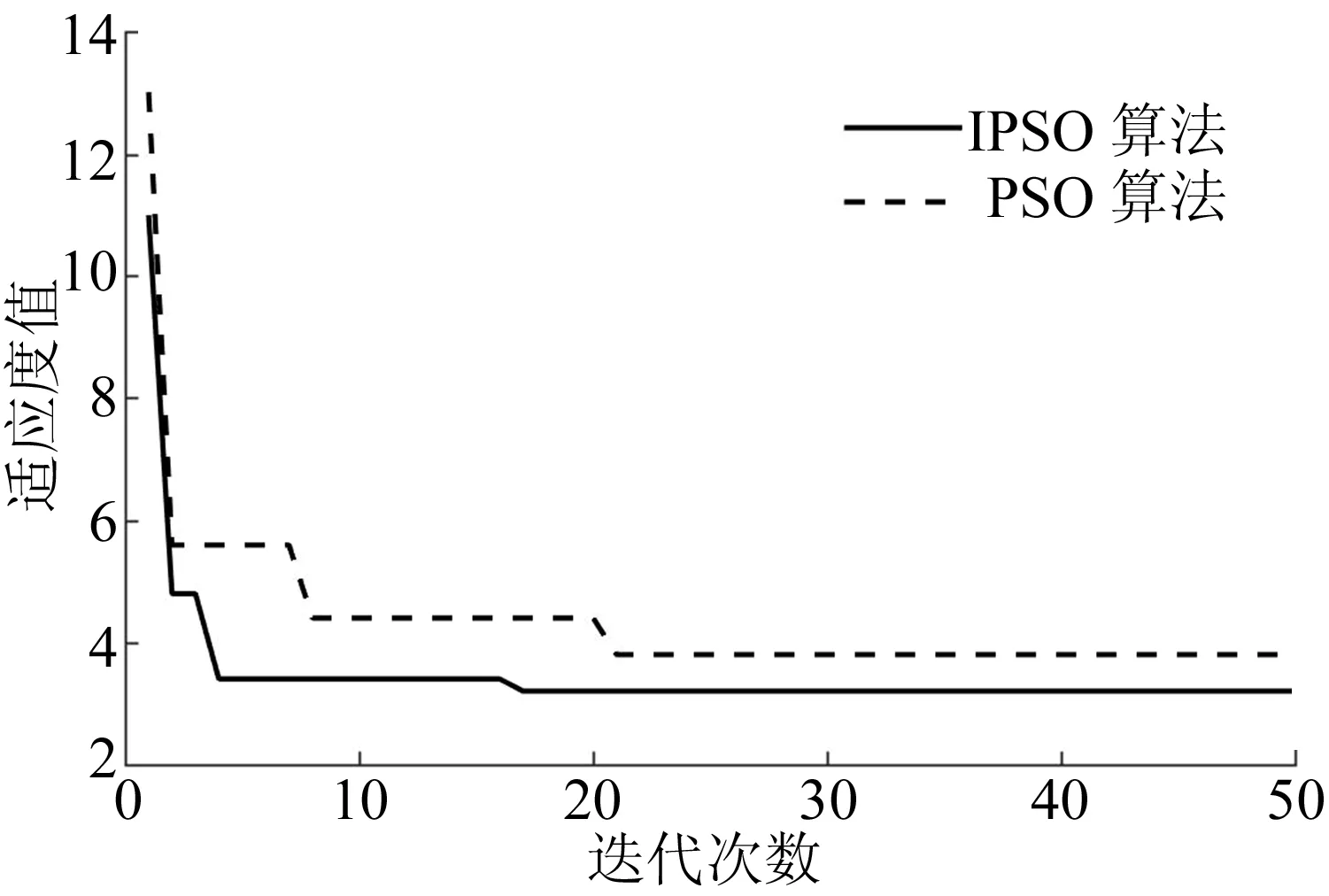
图9 适应度函数变化曲线
从图9可以看出,IPSO算法前期的收敛速度明显高于PSO算法,后期局部搜索时得到的最优解适应度更高。因此本文提出的IPSO算法在搜索效率和搜索精度方面均优于PSO算法。采用2种算法整定得到的控制器参数进行下面的系统仿真试验。
图5给定速度信号中第3个周期内的速度值最大,速度持续时间最短,对系统的控制要求最高,因此截取第3周期开启阶段和开启保持阶段进行分析。
空载时系统位置响应和速度响应如图10所示。
从图10可以看出,2种算法整定得到的参数均可保证系统达到目标位置和给定速度,并且均无超调,但是IPSO算法整定得到的参数响应速度更快,能够快速达到速度给定值,且位置跟踪误差小。

图10 系统空载响应
根据试验数据得出车门在开闭过程中负载约为150 N。在仿真模型中,速度由0变为给定值时施加150 N负载,在速度保持阶段负载不变,当达到目标位置时取消负载,由此模拟车门开闭过程中的负载变化。
带负载时系统位置响应和速度响应如图11所示。
从图11可以看出,在开启阶段给系统突加负载,速度受到的影响较大,但IPSO算法的速度波动比PSO算法小,且能够快速恢复并达到给定速度。

图11 系统带负载响应
为了验证系统对外力干扰的鲁棒性,在仿真开启保持阶段的26 s突加负载,模拟车门保持在目标位置时受到外力干扰的情况。外扰动下系统响应如图12所示。
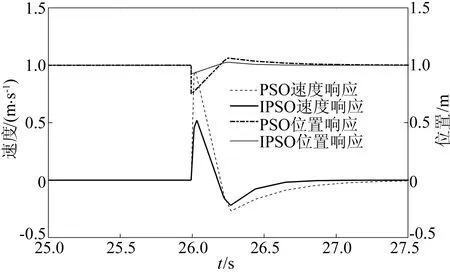
图12 外扰动下系统响应
由图12可知,当系统处于开启保持的稳定阶段,IPSO算法受到外扰动时,位置变化约为PSO算法的50%。
综合图11、图12可知,体现IPSO算法整定的控制器参数比PSO算法整定的控制器参数能使系统获得更好的抗干扰能力。
5 试验分析
车门耐久试验装置的工作频率为5次/min,车门开启目标位置为1 m。
右侧车门采取随机速度试验方法,试验速度在1.0~2.0 m/s之间随机产生,速度分布服从均值u=1.5、标准差σ=1.16的正态分布。
左侧车门采取定值速度试验方法,试验速度为1.5 m/s。
采用2种试验方法分别在高温、常温、低温、高温高湿条件下合计进行105次试验,每104次试验包含3次滥用试验,速度大小为2.5 m/s,随机分布在试验中;采用内开外关和内关外开的方式模拟真实使用情况。
每经过104次试验,测量车门的间隙面差变化。以左侧车门为例,间隙面差的测量点分布如图13所示。

图13 间隙面差测量点分布
利用两侧前门间隙面差分析本文所设计方法的有效性。
每104次试验后的间隙变化和面差变化分别如图14、图15所示,其中实线为随机速度试验结果,虚线为定值速度试验结果。

图14 每104次试验间隙变化
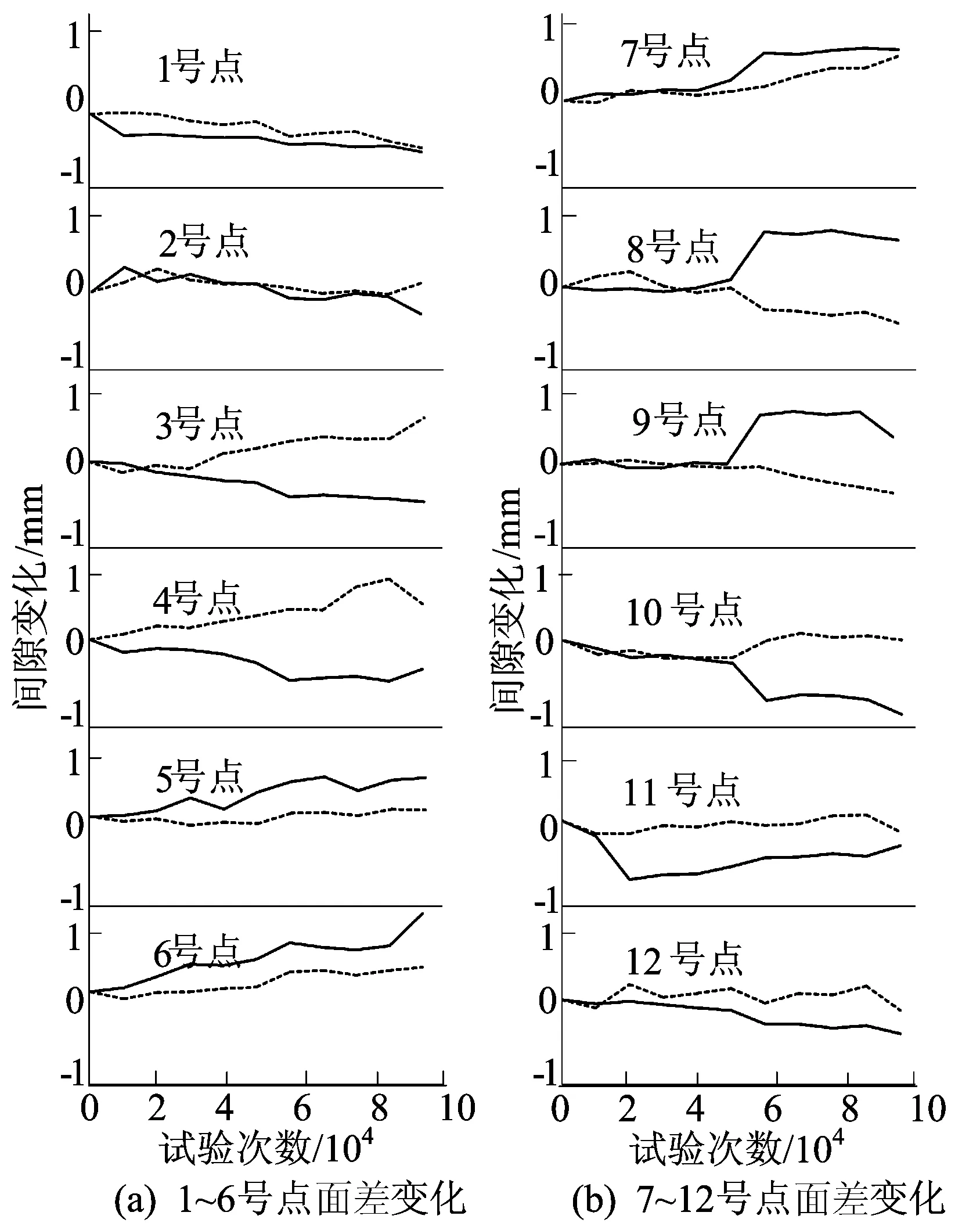
图15 每104次试验面差变化
综合图14、图15可以看出,随机速度试验中各测量点的间隙变化均大于或等于定值速度试验,特别是随次数增加变化量更为明显,11号测量点中第3×104次间隙变化存在测量误差,做忽略处理。
其中1号测量点对应的外后视镜镜座、4号点对应的B柱上部、7号点对应的B柱后门下铰链、8号点对应的B柱安全带下固定点以及9号点和10号点对应的前车门槛处间隙变化较大,3号点对应的窗框上部及9号点对应的前车门槛处面差变化较大,可将其作为今后车门改进工作的依据。
6 结 论
本文提出了一种基于随机速度的车门可靠性耐久试验方法,并设计了速度、位移信号发生器作为系统的给定信号输入,通过乘法器和比较器完成速度控制和位置控制的自动切换,建立了试验装置伺服系统模型,通过融合布谷鸟算法和遗传算法、非线性惯性权重系数、非线性加速因子改进PSO算法,将其用于系统控制器参数整定。仿真对比实验结果表明,本文所提出的IPSO算法相对于常规PSO算法收敛速度快,所得的参数适应度高,系统响应速度快、鲁棒性好,速度控制和位置控制均获得良好的控制效果。
采用车门开闭随机速度试验方法进行105次试验,得出各测量点车门间隙面差数据,并与定值速度试验方法的结果进行对比,测得随机速度试验方法车门间隙面差变化略大,特别是随次数增加变化量更为明显,这符合采用开关门速度越大对车的损坏可能性越大的规律。下一步在条件允许的情况下,可以对开发中路试车门采集相应数据并与实验室耐久试验数据作对比分析,也可以取达到相同间隙面差变化量时的随机速度试验次数和定值速度试验次数进行对比分析,或改变随机速度试验方法中速度分布标准差σ的值来分析间隙面差变化。
猜你喜欢
中国新技术新产品(2022年15期)2022-11-08
汽车实用技术(2022年19期)2022-10-19
汽车工程师(2021年12期)2022-01-17
小资CHIC!ELEGANCE(2022年2期)2022-01-11
航空发动机(2020年3期)2020-07-24
汽车维护与修理(2019年9期)2019-11-08
儿童故事画报·发现号趣味百科(2018年1期)2018-11-14
延河(2017年7期)2017-07-19
阳光(2017年7期)2017-07-18
科学与财富(2016年26期)2016-12-01