基于Simulink 与ADAMS联合仿真的飞艇重心调节装置设计
2021-08-02 11:38杨昊霖魏明辉曾晓楠
合肥工业大学学报(自然科学版) 2021年7期
吴 炜, 杨昊霖, 魏明辉, 曾晓楠, 文 伟
(1.合肥工业大学 工程实践教学中心,安徽 宣城 242000; 2.合肥工业大学 机械工程学院,安徽 宣城 242000; 3.合肥工业大学 计算机与信息学院,安徽 宣城 242000)
0 引 言
曾广泛流行于上世纪的传统飞艇一度由于造价昂贵和氢气的危险性而衰落,进入新世纪后,随着高新材料以及氦气制备技术的发展,飞艇技术又重新受到了科研人员的青睐[1]。飞艇的经济性和续航能力远远优于直升机、多旋翼无人机等新兴飞行器,尤其是其长时间低耗能浮空的能力,使得它在空中测绘、搭建通信中继以及高空监测等领域应用广泛[2]。
飞艇在执行飞行任务时,空中姿态的保持和稳定对其完成任务的能力有着巨大的影响。而飞艇在装配尾翼并搭载应用设备之后,浮力作用的浮心和重力作用的质心在飞艇长度方向会有一定的偏移,从而产生一个俯仰力矩[3]。飞艇在浮空悬停阶段和起飞阶段时,与空气的相对速度低,尾翼起不到有效的调节作用,此时飞艇会发生偏转,影响应用设备的正常工作[4]。
文献[5]提出了基于多囊体飞艇的通过控制多个副气囊进气量的重心调节方法[5],但是这种方式只能够在价格较为昂贵的多囊体飞艇中应用,经济性有待提高。
本文提出一种利用飞艇自身负载在柔性滑轨上的移动来主动控制飞艇整体重心的调节装置,实现对于任何类型的飞艇都能高效控制其重心姿态。
1 系统组成及工作原理
本文提出的飞艇重心调节装置包含4个单元,即执行机构单元、能源单元、控制单元、传感器单元。
执行机构单元中,电子调速器调节直流电机的启停和转速,电机通过蜗杆蜗轮减速与同步带来控制负载在飞艇轴线方向上的位移;传感器单元中,电子陀螺仪与加速度计分别用于测量艇身偏转角速度与角度,温度计与霍尔电流传感器用于实时检测执行电机的工作状态,旋转编码器用于测量电机角位移;能源单元中,装置的供电主要由艇载主电源来提供,发生紧急状况时,艇载应急电源可接替供电;控制单元中,主要由艇载单片机实现各个传感器的检测与记录以及对各执行装置的逻辑控制。
飞艇重心调节装置的主要工作原理是依据传感器检测到的艇身的姿态来驱动电机转动,然后控制滑动重物负载的位移,最终实现控制重心变化。
首先由电子陀螺仪测得艇身俯仰方向偏转角速度,对角速度积分得动态偏转角度,同时加速度计获取艇身静态偏转角度,两者融合后获取偏转角速度与角度的精确值,并传输至控制系统[6];控制系统根据得到的角速度与角度经过PID控制算法处理后,向调节电机发送运动信号,使调节装置改变飞艇重心位置,同时调节电机向控制系统反馈电机本身的温度和电流,防止电机堵转烧坏;改变重心位置后,反馈于艇身姿态中,实现闭环控制。
飞艇重心调节装置工作原理如图1所示。

图1 飞艇重心调节装置的工作原理
2 Simulink与ADAMS联合仿真
2.1 建立ADAMS简化物理模型
在ADAMS软件中建立飞艇与重心调节负载的模型,为降低仿真运算量,对艇身外形、材料以及重心调节装置滑动轨道均做了一定的简化。重心调节装置的ADAMS简化物理模型如图2所示。

图2 重心调节装置的ADAMS简化物理模型
2.2 建立Simulink控制系统模型
在Matlab Simulink软件中建立控制系统模型,系统从ADAMS交互模块中获取艇身俯仰运动的角度与角速度后,将2个参数输入PID控制系统中处理,最终向ADAMS交互模块中输出重心调节负载的位移。
2.3 Simulink与ADAMS联合仿真与分析
在建立好ADAMS中的物理模型与Simulink中控制模型之后,便可以进行Simulink与ADAMS软件的联合仿真,通过Simulink中的控制系统模拟控制ADAMS中的物理模型,并得到仿真结果。
在模拟仿真之前,飞艇处于水平状态;仿真初始时,由于自身重心与体心不重合,重力会对体心产生力矩。
ADAMS仿真结果变化曲线如图3所示。
图3a所示为仿真前12 s内俯仰转动角度的变化曲线。从图3a可以看出:仿真开始时,由于力矩的作用,艇身角度首先会发生较大偏移,在重心调节装置作用下,角度初始变化最大仅有12 °左右,1.1 s时便开始回转;在仿真开始4.3 s之后,艇身的旋转角度变化已被限制至2.0 °以内,达到了很好的调节效果;8 s之后,艇身已基本不偏转,回归至初始状态。
图3b所示为仿真前8 s内俯仰转动的角速度变化曲线。从图3b可以看出:初始时,角速度增大至18 rad/s左右;0.3 s时,在重心调节装置作用下,偏转角速度开始降低,仍然呈偏转远离状态;1.1 s时,角速度变为负值,艇身开始回转;在仿真开始3.8 s之后,角速度已被降低至1.7 rad/s之内;在8 s之后,偏转角速度基本为0,回归稳定状态。
图3c所示为电机控制的重心调节负载位移曲线。从图3c可以看出,重心调节装置运动曲线较为光滑,没有尖锐部分,表明可以对电机实现很好的控制性。
图3d所示为在无重心调节装置作用下的仿真情况,飞艇由于力矩的存在而作简谐运动,对飞艇完成任务大为不利。

图3 ADAMS仿真结果变化曲线
3 结构设计与有限元分析
3.1 机械零件设计装配
运用SolidWorks2018软件进行本文重心调节装置的机械结构的设计,装置共包括固定支架、滑轨、滑移装置、驱动电机支架、直流电机和传送带。
由于飞艇在运行过程中,装置电机多数情况下处于保持某个输出角的状态,为了减少运行时的能耗,选用能够断电自锁的蜗杆蜗轮电机;同时因为滑动速度较低,所以配合滑动轴承使用。最终使用时在滑移装置中使用飞艇系统电池装置作为配重,最大程度上节约整体重量。本文重心调节装置整体重量仅为240 g,对飞艇艇身平衡影响较小。机械零件设计装配图如图4所示。
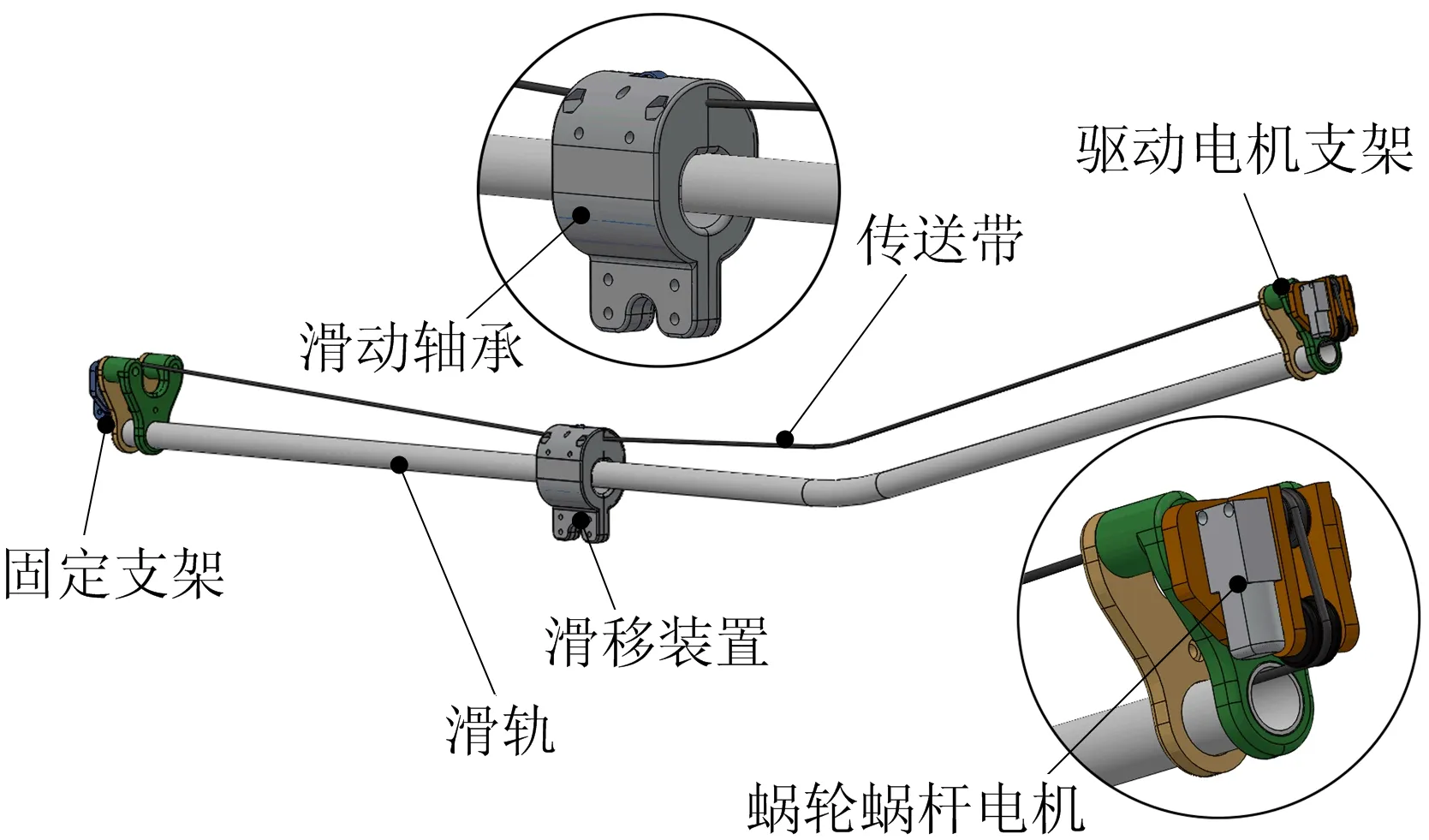
图4 机械零件设计装配图
3.2 有限元分析
运用SolidWorks2018软件进行本文装置中主要受力零件滑移装置的有限元分析,经过分析,装置强度满足要求,且最大变形量仅为4.95×10-3mm,满足使用要求。有限元分析结果如图5所示。
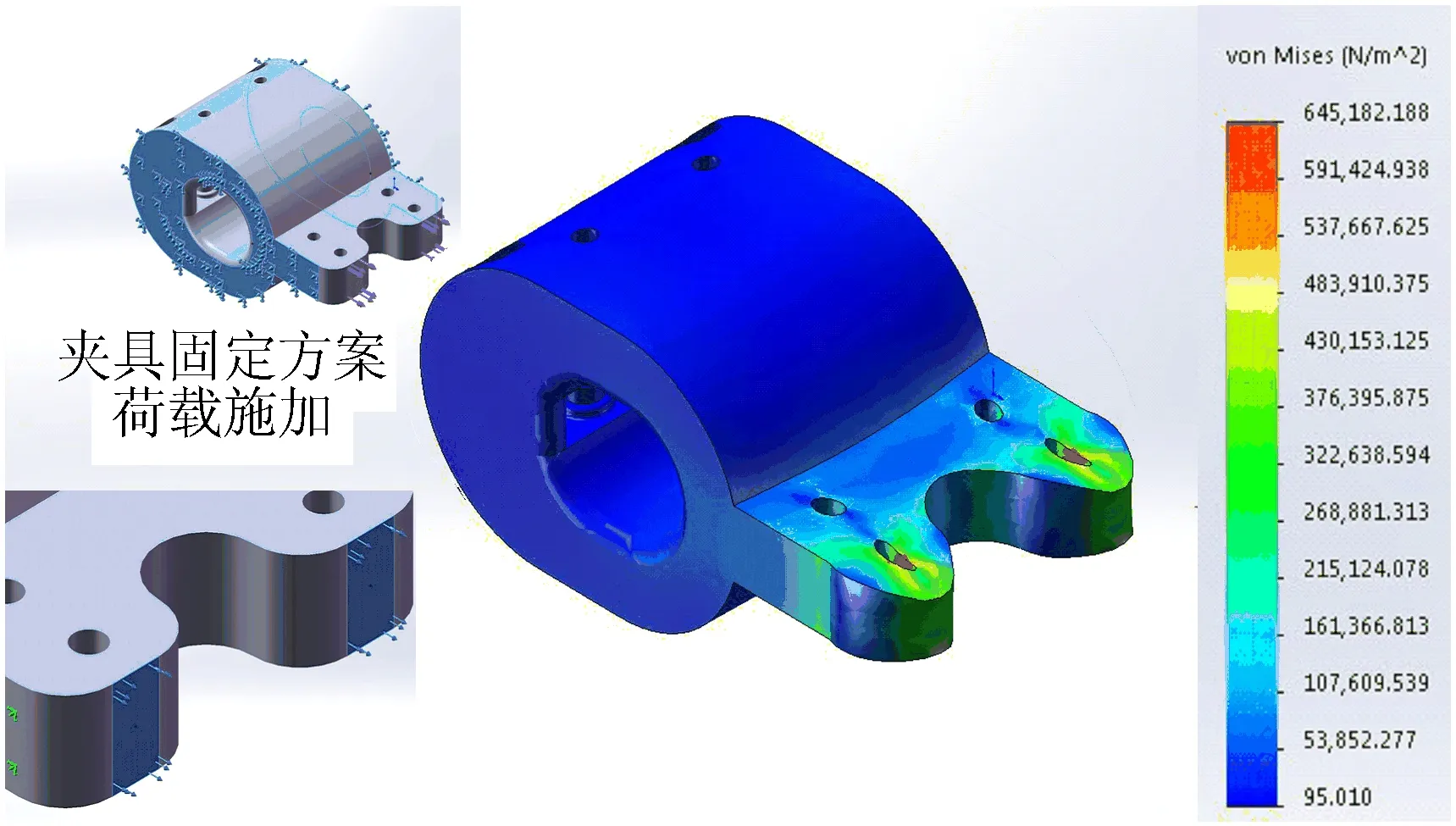
图5 有限元分析结果
4 实物测试验证
4.1 控制器
飞艇重心调节控制系统以STM32单片机为核心,实现对传感器数据的实时接收,并运用滤波函数对数据进行实时处理、检查各设备的工作状态,最终获得飞艇重心调节装置的位置、温度、电流等数据,并运用PID控制算法进行重心调节装置的控制[7]。
4.2 传感器组
(1) 温度传感器。选用DHT22单总线数字温湿度传感器,可用于检测环境温湿度,采用AM2302芯片,具有高精度和量程,可精确测量飞艇重心调节装置的工作温度[8]。
(2) 旋转编码器。选用欧姆龙OMRON旋转编码器,型号为E6B2-CWZ6C,A、B相可通过读取高低电平判断正反转,Z相用于脉冲计数,从而求得电机转速与位移。
(3) 霍尔电流传感器。选用WCS1800霍尔电流传感器,可用于监测重心调节装置电机工作瞬时电流,防止电流堵转与过载。
(4) 电子陀螺仪。选用HWT101电子陀螺仪,其具有高稳定、低功耗的优点,内置核心算法与卡尔曼滤波技术,用于精准测量飞艇运行时俯仰偏转角速度。
(5) 加速度传感器。选用ADXL335加速度计,其可以测量飞艇在运行时的艇体静态重力加速度以及运动、冲击或振动导致的动态加速度。
4.3 实物平台验证
为了验证Simulink与ADAMS联合仿真结果的准确性,按照设计结构制作了飞艇与重心调节装置的实物样机。实物样机如图6所示。
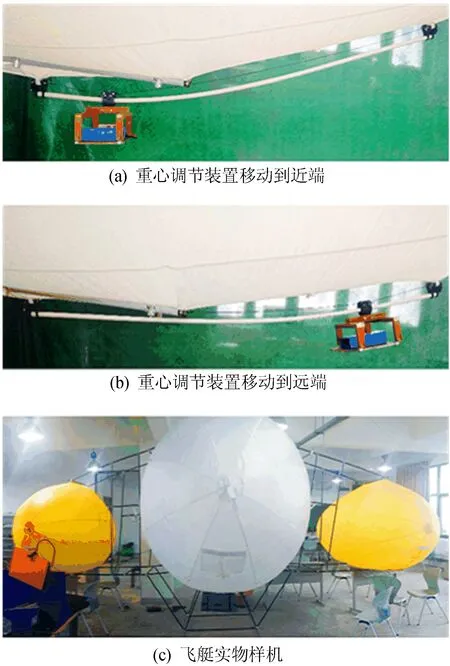
图6 飞艇与重心调节装置实物样机图
通过吊装连接的艇身在重心调节装置作用下的实际角度变化曲线如图7所示。
从图7可以看出,实物样机在实验过程中因为受到复杂的外部因素干扰,因此艇身在调节过程中存在少量起伏,但整体上实物样机在调节装置作用下的角度变化曲线仍与仿真结果相对较为吻合。这进一步证明仿真结果的正确性与本文装置的实用性。
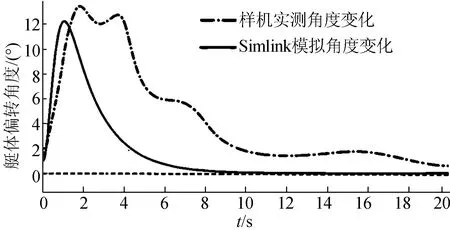
图7 样机实际角度变化曲线对比
5 结 论
本文设计了一种飞艇重心调节装置,致力于解决无人飞艇在垂直起降与悬停时由于无法消除重力与浮力产生的力矩而导致姿态失控的问题。在设计时,采用了Matlab Simulink软件建立了PID控制系统的模型,并与ADAMS动力学分析软件进行了联合仿真;运用SolidWorks软件进行了几何模型的设计与有限元分析;最终建立了实物样机进行了方案验证。结果表明,该飞艇重心调节装置能够在飞艇垂直起降与悬停时起到很强的姿态调节作用。
猜你喜欢
大自然探索(2022年7期)2022-08-26
中国应急管理科学(2022年2期)2022-05-23
汽车实用技术(2022年5期)2022-04-02
防爆电机(2022年1期)2022-02-16
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
课程教育研究(2021年10期)2021-04-13
中学课程辅导·教师通讯(2018年10期)2018-09-04
琴童(2018年1期)2018-03-26
中学生数理化·高一版(2017年3期)2017-07-08