高速公路隧道智能照明控制系统研究
2021-07-30 11:51李玉善
山东交通科技 2021年3期
潘 冬,郭 林,李玉善
(1.山东省交通科学研究院,山东 济南 250031;2.山东科技大学,山东 青岛 266590)
引言
在进入高速公路隧道时,视野内光线的明暗会发生较大变化,不利于行车安全。因此,在照明满足安全行车的基础上,减小电力消耗,对公路隧道照明控制提出了很高的要求[1]。孙巧燕等[2]通过对LED 灯和高压钠灯全寿命周期内经济效益与社会效益比较得出前者具有巨大优势的结论。刘军[3]提出了一种基于模糊控制方法的隧道照明控制系统,但未考虑车速对照明控制的要求;秦慧芳等[4]运用模糊神经网络控制方法搭建了一种三输入-单输出的控制模型,但未监测实际的照明控制情况;沙欣[5]提出了一种神经网络模糊控制模型,但未考虑速度的影响;秦莉[6]提出了一种能够根据车辆有无、车辆行为信息和环境信息实时调整照明状态以实现按需照明的方法。
1 系统设计
1.1 控制系统结构
该控制系统应能实时采集隧道内外的光亮度,驶经车辆的流量及车速,对隧道内的灯具进行合理控制。控制系统结构见图1,首先利用车辆检测器、亮度检测器以及照度检测器分别检测车速、交通量、隧道洞外亮度以及隧道洞内亮度等信息,然后通过智能照明系统控制器实现对LED 灯的智能控制。
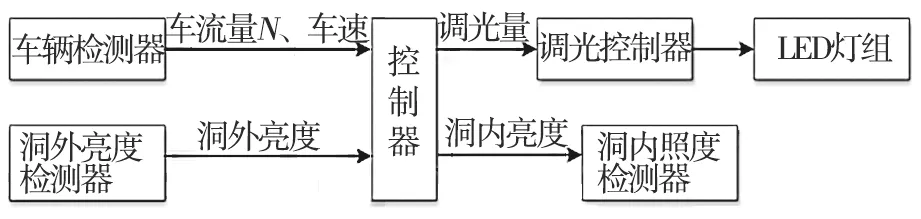
图1 控制系统结构
1.2 车辆检测器
车辆检测方法有无线地磁检测、环形线圈检测、视频检测、红外线检测、雷达检测、超声波检测和激光检测等[7]。其中地磁检测技术检测精度高,安装维护方便、价格便宜、使用寿命长、易更换。
为了保证行车安全,确定隧道内照明灯具的工作状态,需在隧道的驶入段设置两组车辆检测器,分别作为预检检测器和入口检测器。预检检测器对车辆的预检,既能避免车辆到达隧道时临时开灯带来的不适感,也能防止隧道内照明频繁的开闭。入口检测器得到的数据作为控制算法的输入数据,出口检测器用来确认车辆是否驶出隧道。
1.3 隧道照明亮度、照度仪
隧道洞外亮度是入口段亮度控制的重要参数,入口段亮度决定了隧道其他分段的照明[8]。亮度检测器检测洞外亮度,照度检测仪用于检测隧道内灯光的照度,反馈照明情况。系统的洞外亮度检测器将检测到的隧道洞内外光照通过RS485 总线采用MODBUS 协议上传至本地控制器。检测系统结构见图2。

图2 洞外亮度、照度检测工作系统结构
1.4 LED 调光
LED 光源的调光模式主要有灯管阵列控制、灯群组控制和无极调光三种方式。三种调光方式的照明需求曲线[9]差别很大。传统照明方式保持亮度不变,灯阵列或灯群组控制的亮度调节呈阶梯状,只有无级调光能近似实现线性调节,符合各种情景下的亮度需求。目前市场上使用较多的LED 无级调光模式主要有模拟调光、可控硅调光和PWM 调光等。模拟调光的调节范围具有局限性,可控硅调光对工作环境要求比较高,故本系统方案采用PWM 调光方式。
PWM 通过对驱动器施加数字脉冲信号,反复开关驱动器以控制灯源实际功率,从而达到调光目的。通过改变数字脉冲信号的占空比就可以等效的改变控制电流,从而平滑的实现256 级甚至更大范围的调光需求。
2 系统控制策略
由于隧道最主要的调光部分是在入口段,并且过渡段亮度是依据入口段亮度得来,所以本系统把入口段亮度作为控制的输出。影响入口段亮度的因素有洞外亮度、车速、交通量等,故将其作为模糊系统输入变量,其对应的模糊语言集分别是L20(洞外亮度)、V(车速)及N(交通量)。模糊PID 控制方法可以自动调整系统的控制参数,提高系统的响应速度和稳定性。
2.1 模糊化
依据《公路隧道照明设计细则》(JTG/T D70/2-01—2014),洞外亮度L20的真实论域为[0 6000],离散论域取[-6 6],隶属度函数图像选择三角形;车速的真实论域为[0 120],取离散论域为[-4 4],隶属度函数图像选择梯形;交通量的几个分界值为 2 400 veh/h、1 300 veh/h、700 veh/h、360 veh/h[10],其实际论域为[0 2400],取离散论域为[-4 4]。本系统选择入口段亮度M 作为模糊控制的输出,入口段调光的最大亮度为Lth=k×L20(S)=0.070× 6 500=455,其真实论域为[0 455],取离散论域为 [-6 6],隶属度函数图像选择梯形。
2.2 模糊规则的确定
参照专家经验及实际的控制经验,制定模糊规则见表1。

表1 模糊规则
在进行模糊控制时,L20、V、N,并不能直接作为模糊运算的输入变量,还需要通过量化因子进行量化,每一个输入变量都有其对应的量化因子:

式中:ke—量化因子;m—输入变量离散论域范围;eh—输入变量真实论域的最大值;el—输入变量真实论域的最小值。
对于模糊控制输出的M,同样需要比例因子的换算才能得到实际的输出结果:

式中:ku—比例因子;uh—输出变量真实论域的最大值;ul—输出变量真实论域的最小值;l—输出变量离散论域范围。
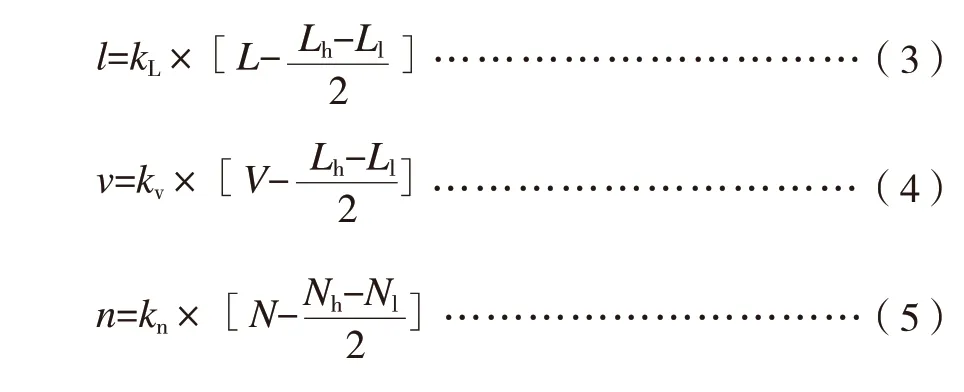
依据公式(1)和(2),可以得出输入的量化因子和输出的比例因子。在确定了量化因子和比例因子后,输入变量L20、V、N 可通过公式(3)~(5)转换为模糊控制的输入l、v、n:
模糊控制器的输出M 可以由公式(6)转化成实际输出m:

2.3 模糊推理
对于if L and v and n and p then M 的模糊规则,依据Mamdani 推理可得输入与输出关系:

式中:Ri—输入与输出对应的第i 条规则,i=1,2……63;T—矩阵转置。
模糊关系矩阵:

则可以依据模糊关系矩阵求出对应的调光亮度:

2.4 解模糊
常用的解模糊法有最大隶属度法、加权平均法和重心法。最大隶属度法未考虑输出隶属度函数的形状,只考虑了最大隶属度处的输出值,容易丢失许多有用信息,所以不宜选用;与最大隶属度法相比,重心法有着更加平滑的输出,当输入信号发生微小变化时,输出也会发生变化。
重心法是取隶属度函数曲线与横坐标围成面积的重心为模糊推理的最终输出值,重心法:

入口段亮度Lth由模糊控制法确定以后,过渡段、基本段和出口段按照如下方法来确定。
根据规范要求,过渡段亮度由TR1、TR2、TR3三个照明段组成,与之对应的亮度可按表2 取值。

表2 过渡段亮度
基本段照明亮度仅与交通量和车速有关,亮度值可按表3 取值。

表3 基本段亮度
出口段亮度宜取基本段亮度的5 倍:

3 控制系统仿真实验
3.1 实验系统搭建
实验系统硬件由控制器模块、亮度检测模块、PWM 调节电子开关控制板、隧道模型等构成[11]。控制器模块采用的是工业级51 芯片STC89C52RC 单片机,负责接收数据和发送命令;亮度检测模块采用的是GY-30 数字光强传感器;PWM 调节电子开关控制板采用Risym 公司生产的部件,实现LED 灯亮度的终端控制;两节5 号电池提供LED 照明所需的电量,工程应用中,应该根据实际灯具功率及工作电压的要求选择合适的电源电压供电;搭建了简易的隧道模型框架,隧道长60 cm,隧道口宽度为 20 cm,高30 cm;内设30 颗LED 灯珠,采用透明塑料板罩以便于观察调光效果。
电脑端通过数据线把程序下载到单片机控制器,GY-30 模块采用IIC 通信,通过SDA、SCL 引脚分别接STC89C52RC 单片机的P2.0、P2.1 引脚,将采集光强数据传输到单片机内部存储器,并把采集到的外界亮度信息通过单片机相应引脚显示到LCD 屏上,信息经单片机调用处理后产生PWM 调光信号,利用PWM 电子开关控制板模块通信传来的调光信息调节LED 灯亮度。
3.2 结果分析
当外界环境(亮度)变化时,隧道模型内LED灯的亮度能够根据预先调试好的程序实现智能照明。随着外界亮度的增加,LED 亮度也随之增加;外界亮度减小,LED 亮度也随之减小。
通过对试验系统的搭建和测试,验证了方案中对LED 驱动模块设计的可行性,能够根据上位机发来的调光数据实现LED 终端的智能调光控制。由现场情况可以看出系统响应速度快,能够根据外界环境因素的变化,平稳快速的实现LED 的平滑调光,有利于交通安全、节约能源,适用于高速公路隧道照明。
4 结语
设计了高速公路隧道智能照明控制系统,得出隧道内部照明亮度可根据洞外环境亮度、交通量、车速等实现自动调节。该系统方案可以根据实际要求、隧道具体自然地理条件和隧道设计规格修改,具有更大的灵活性,节能的潜力更大。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
中国交通信息化(2020年5期)2021-01-14
计算机与数字工程(2019年8期)2019-09-03
中国交通信息化(2019年4期)2019-07-13
火力与指挥控制(2018年10期)2018-11-13
电子制作(2017年17期)2017-12-18
电子制作(2017年10期)2017-04-18