失效测点影响下极地船舶结构冰载荷的有效识别方法
2021-07-24 08:55:04王键伟陈晓东何帅康段庆林季顺迎
工程力学 2021年7期
王键伟,陈晓东,何帅康,段庆林,季顺迎
(大连理工大学工业装备结构分析国家重点实验室,辽宁,大连 116023)
随着全球气候变暖日益加剧,新兴的北极航道比传统的亚欧航道缩短约8200 km航程,可显著减少航运成本、提高运输效率;同时北极地区蕴藏着全世界约1/4的未探明油气资源,这将带动极地穿梭油轮、破冰船等极地装备的蓬勃发展[1−2]。极地船舶在北极海域航行时,会不可避免地与各种类型的海冰发生碰撞,从而受到冰载荷的作用。如若处置不当,冰载荷将对船体结构造成难以修复的损伤,严重威胁航行安全。目前,对船体结构冰载荷的现场监测已成为冰工程领域重要的研究内容,北极周边各国均开展了大量的现场试验。挪威[3]、芬兰[4]、美国[5]、韩国[6]已成功研发出冰载荷监测与预警系统(ice load monitoring and alarm system, ILMS)。我国已多次在南极和北极科学考察期间对“雪龙号”极地考察船开展冰激振动响应与冰载荷的现场测量[7],并为“雪龙2号”极地考察船设计了船体监测及辅助决策系统[8]。该系统可对海冰冲击事件做出实时反馈与辅助决策,提高冰区航行的安全性。
船-冰相互作用是一个复杂的动力学耦合过程,现阶段还难以准确对冰载荷进行直接测量。相比之下,冰载荷引起的应变响应可以方便地通过在船体结构上安装应变传感器直接测得。因此通常采用间接方法,即根据应变反演识别冰载荷。近年来,国内外学者提出了多种实用的冰载荷识别方法,如影响系数矩阵法[9−11]、格林函数法[12−13]、支持向量机法[14]等,其中影响系数矩阵法最为经典,应用最广泛。刘瀛昊等[15−16]的研究表明,影响系数矩阵法不仅可以反演规则区域内的均布、准静态载荷,对于作用区域随机分布的非均布、时变载荷也有很好的适用性。然而,当应变测量区域与载荷施加区域不一致时,影响系数矩阵将出现奇异,从而导致载荷识别值不满足稳定性、唯一性要求[14]。因此,在实船上布置应变传感器时,应将其安装在与海冰频繁接触的船体局部结构上,并预先通过有限元分析验证、优化传感器布置方案[6]。
工程结构现场试验中获取的测量数据除了含有误差,往往也存在错误。这些错误数据的产生通常与测点失效有关[17]。失效测点的存在使测量结果难以预料,从而降低试验结论的可靠性[18]。在船体结构冰载荷的现场测量中,应变传感器能否正常工作直接关系到冰载荷识别的准确性。虽然目前对船体结构冰载荷识别的测点失效问题鲜见公开文献,但实际工程中通常采取两种较为实用的做法:一种是将失效测点处的应变数据及影响系数矩阵中相应的元素一并剔除,这与兵器工程[19]、汽车工程[20]领域的做法类似;另一种是保持影响系数矩阵不变而将失效测点处的应变数据替换为0,该做法因改动较少而更常采用。虽然这两种处理方式可避免监测区域内大规模的载荷识别错误,但失效测点附近的载荷识别误差依然较大;由于数据缺失,失效测点处的冰载荷更是无从识别;若失效测点恰好位于高负载区,则可能会对船体结构的安全评估造成误导。相比之下,若能充分利用并深入发掘应变数据间的潜在联系,将其应用于估算失效测点处的应变进而识别出冰载荷,则将进一步提高失效测点影响下船体结构冰载荷识别的准确性。
为此,本文通过对典型极地船舶舷侧板架结构进行有限元分析,研究应变测点失效对冰载荷识别效果的影响;通过对“天恩号”多用途冰级船实测应变数据以及典型极地船舶舷侧板架结构有限元应变数据的深入分析,确定测点应变的空间分布规律,并由此提出失效测点影响下基于最小二乘拟合的船体结构冰载荷识别方法,进而在7种典型工况下验证上述方法的有效性。
1 船体结构冰载荷识别的影响系数矩阵法
影响系数矩阵法(influence coefficient matrix method)是一种经典的船体结构冰载荷识别方法,具有原理简单、操作方便、结果准确等优点。该方法不仅着眼于目标构件自身受到冰载荷时产生的应变,还考虑到船体结构的其他构件所受冰载荷对目标构件应变的影响。
假设船体结构的应变响应仅包含冰载荷的静力效应引起的变形,忽略动力效应激发的局部高频应变,则应变与冰载荷的转换关系可表示为[21]:

式中:C为应变与冰载荷转换的刚度阵,即影响系数矩阵;δ为应变与冰载荷转换的柔度阵,即影响系数矩阵的逆阵;ε为应变矢量;p为冰载荷矢量。
将式(1)进一步展开:

式中,n为应变测点的个数。C中的每个元素为影响系数,可通过建立船体结构的有限元模型,然后依次在每个测点所在子域内单独施加单位载荷的方式确定。
当仅在i号测点所在子域内施加单位载荷时,式(2)则写作:

比较式(2)与式(3)可知,此时 ε 为 δ的第i列矢量。依次对每个子域进行上述操作即可得到 δ中的所有元素,再对 δ求逆可进一步得到C。若 ε与C均已知,代入式(1)即可得到p。基于上述原理即可由应变反演识别出冰载荷。
采用影响系数矩阵法识别船体结构冰载荷时,首先需要在与海冰频繁接触的船体结构上设置监测区域,并将整个监测区域划分为若干子域;然后假设每个子域内的应变处处相同,在各子域内至少选取其中一点作为测点;通过在这些测点处安装应变传感器即可直接测得应变,最后通过影响系数矩阵法识别出冰载荷。
目前,大多数船舶采用的应变传感器为电阻应变片[22]。这种经典的应变传感器具有很高的测量精度,且原理简单、造价低廉,对监测区域的适应能力强。此外,还有少数船舶采用光纤光栅传感器、外部冲击板等其他应变传感器。但由于光纤光栅传感器造价昂贵,大范围布置时成本较高[23−26];外部冲击板原理复杂、精度不高、容易污损[27−28],因此两者的普及程度均远不如电阻应变片。应变传感器的安装位置一般集中在船首、艏肩、艉肩部舷侧的肋骨、纵桁、横梁、外板等构件[29−32]。
2 应变测点失效对船体结构冰载荷识别效果的影响
应变传感器属于精密仪器,特别是对于目前广泛采用的电阻应变片,其质地脆弱、对电阻敏感,很容易在安装过程中发生难以察觉、无法及时修复的损坏,从而导致该失效测点处的应变数据异常,使影响系数矩阵法识别出的载荷值与真实值相去甚远。因此,分析应变测点失效对船体结构冰载荷识别效果的影响具有重要意义。
2.1 舷侧板架结构的有限元模型及应变测点布置
本文通过建立典型极地船舶舷侧板架结构[33]的有限元模型来研究应变测点失效对船体结构冰载荷识别效果的影响。如图1所示,该模型的骨架形式为横骨架式,由1块舷侧外板、2根舷侧纵桁(T型)、2根强肋骨(T型)、18根普通肋骨(L型)等构件组成。以图1中舷侧外板左下角O点为原点建立坐标系,舷侧纵桁方向为x轴,肋骨方向为y轴,垂直于舷侧外板方向为z轴。各构件的尺寸、有限元模型的参数分别列于表1、表2。

图 1 典型极地船舶舷侧板架结构的有限元模型Fig.1 Finite element model of typical polar ship's side grillage structure

表 1 舷侧板架结构中构件的尺寸Table 1 Dimensions of components in side grillage structure

表 2 有限元模型的参数Table 2 Parameters of finite element model
如图1所示,取中央板格为监测区域,总面积为2.4 m×2.8 m。将其划分为6×7个面积为0.4 m×0.4 m的子域,在每个子域内的普通肋骨的腹板上布置1个应变测点,选取肋骨腹板1/2高度处平行于舷侧外板方向的正应变识别冰载荷[13],监测区域与应变测点的布置如图2所示。
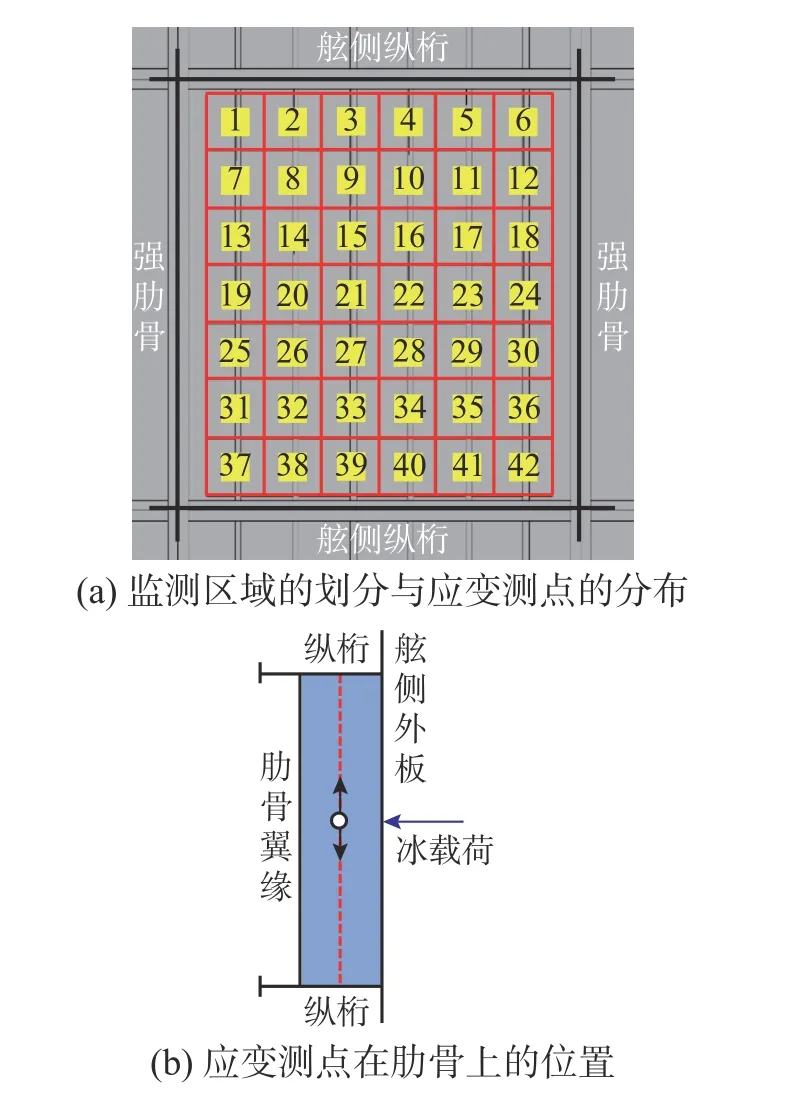
图 2 监测区域与应变测点的布置Fig.2 Layout of monitoring area and measuring points
2.2 应变测点失效对冰载荷识别效果的影响
为分析上述42个应变测点中某一测点失效对各子域内冰载荷识别效果的影响,同时便于发现由测点失效引起的冰载荷识别误差在监测区域内的空间分布特征,将载荷工况1设置为:在整个监测区域内施加大小为2.5 MPa、方向垂直于舷侧外板的面载荷。以此模拟船-冰接触时海冰施加给船体的局部冰压力[34]。
首先依次在每个子域内单独施加1.0 MPa的单位载荷,通过有限元分析得到各测点处的应变,并将其组装为影响系数矩阵;然后在整个监测区域内施加2.5 MPa的面载荷,将测点应变的计算结果代入式(1)即可识别出对应的冰载荷,由于此冰载荷识别值p与实际施加值preal相差无几,相对误差通常小于0.1%,因此近似认为两者相等。
以1号测点失效为例,将该测点处的应变替换为0,而2号~42号测点应变以及影响系数矩阵保持不变,重新对冰载荷进行识别得到p′,则i号测点所在子域内的冰载荷识别误差ei可写作:


图 3 由测点失效引起的冰载荷识别误差在加载区域内的空间分布(工况1)Fig.3 Spatial distribution of ice load identification error caused by measuring point failure in loading area (Case 1)
图3表明测点失效可对船体结构冰载荷识别效果造成显著影响。总地来说,离失效测点越近的子域,其冰载荷识别误差越大;失效测点所在子域的误差最大,但其附近通常也存在一个冰载荷识别误差很小的子域;当两个失效测点关于x轴方向(即构件布置稀疏方向)对称时,冰载荷识别误差的空间分布也关于该方向对称;当失效测点在x轴方向(即构件布置稀疏方向)上移动时,冰载荷识别误差的空间分布也在该方向上移动;失效测点在y轴方向(即构件布置密集方向)上对冰载荷识别效果的影响大于x轴方向(即构件布置稀疏方向)。此外,当在整个监测区域内分别施加0.5 MPa、1.0 MPa、1.5 MPa、2.0 MPa、2.5 MPa、3.0 MPa的面载荷时,冰载荷识别误差未发生明显变化,即冰载荷识别误差与施加载荷的大小无关。
为进一步分析失效测点与加载区域的位置关系对冰载荷识别效果的影响,将载荷工况2设置为:在由9号~11号、15号~17号、21号~23号测点所在的3×3个子域组成的加载区域内施加大小为2.5 MPa、方向垂直于舷侧外板的面载荷。仍按工况1的做法依次分析1号~42号测点单独失效对冰载荷识别效果的影响,最终将冰载荷识别误差在加载区域内的空间分布汇总于图4。结果表明:失效测点离加载区域越近,冰载荷识别误差越大;当失效测点位于加载区域内部时,冰载荷识别误差最大;当两者间隔超过2个子域时,失效测点对冰载荷识别效果的影响几乎可以忽略不计。此外,失效测点所在行或列上的子域内的冰载荷识别误差大于其他子域。
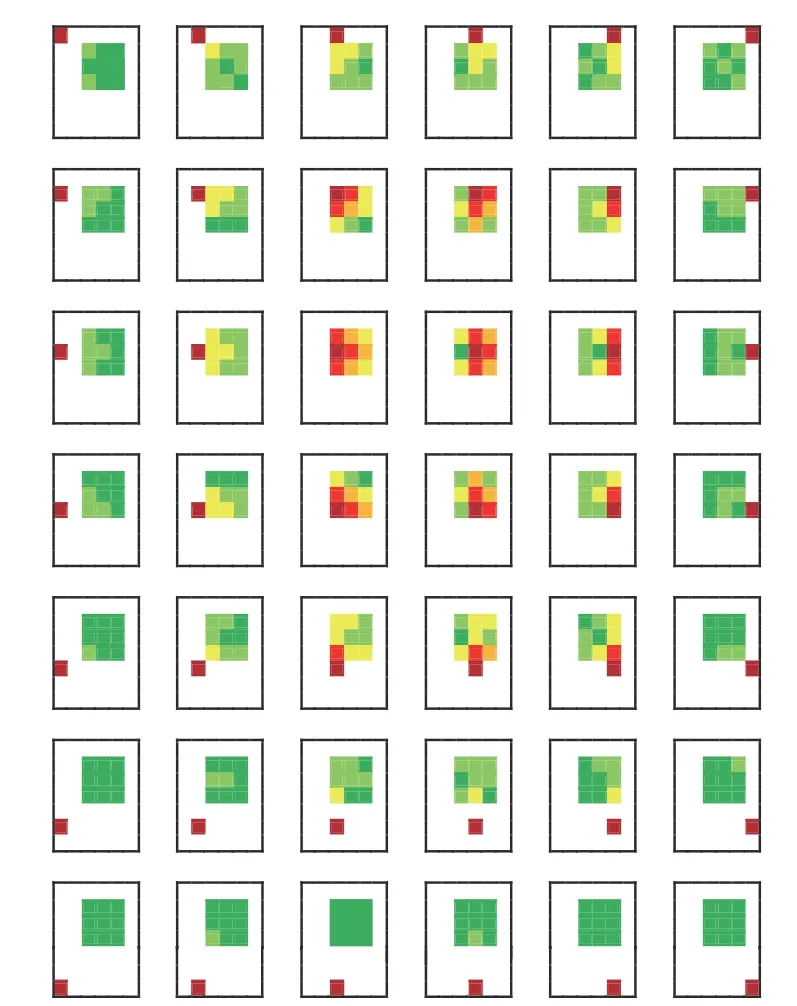
图 4 由测点失效引起的冰载荷识别误差在加载区域内的空间分布(工况2)Fig.4 Spatial distribution of ice load identification error caused by measuring point failure in loading area (Case 2)
3 失效测点影响下基于最小二乘拟合的船体结构冰载荷识别方法
为有效削弱测点失效对船体结构冰载荷识别效果造成的影响,下面从分析测点应变的空间分布规律入手,提出一种估算失效测点应变的最小二乘拟合(least square fitting, LSF)方法,并在此基础上通过影响系数矩阵法识别冰载荷。
3.1 测点应变拟合的最小二乘法


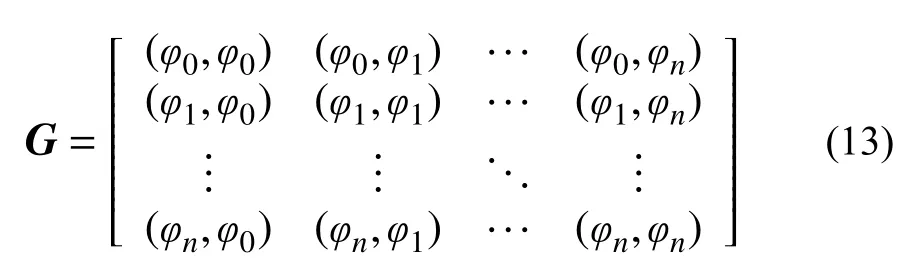
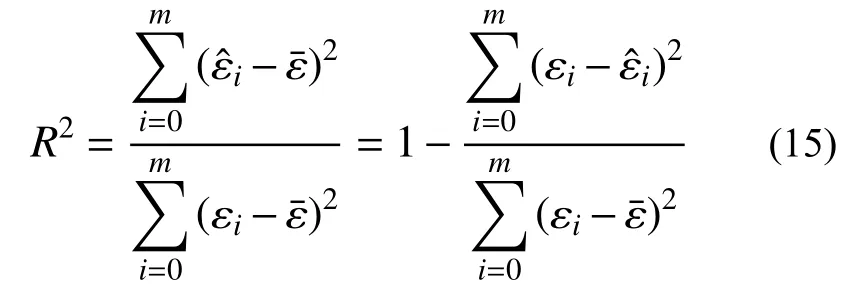
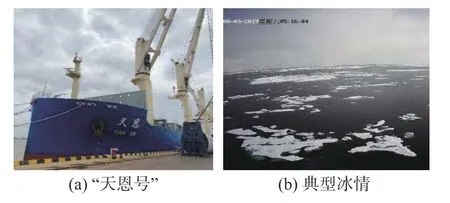
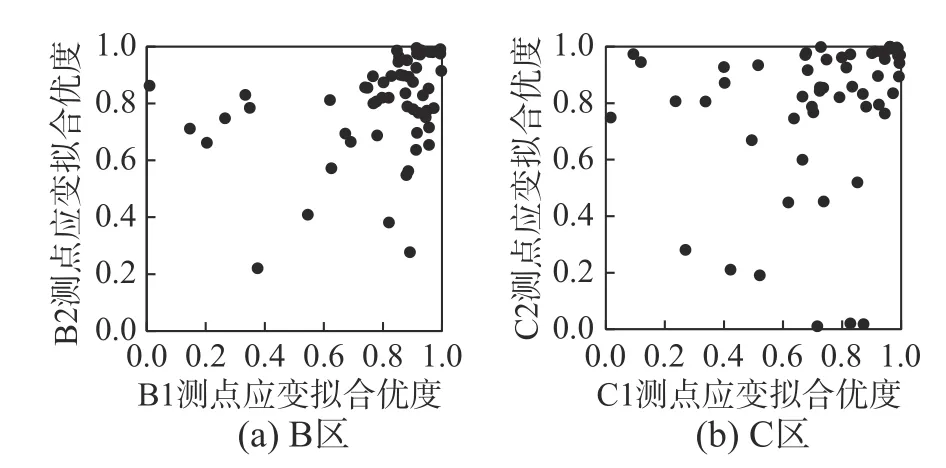
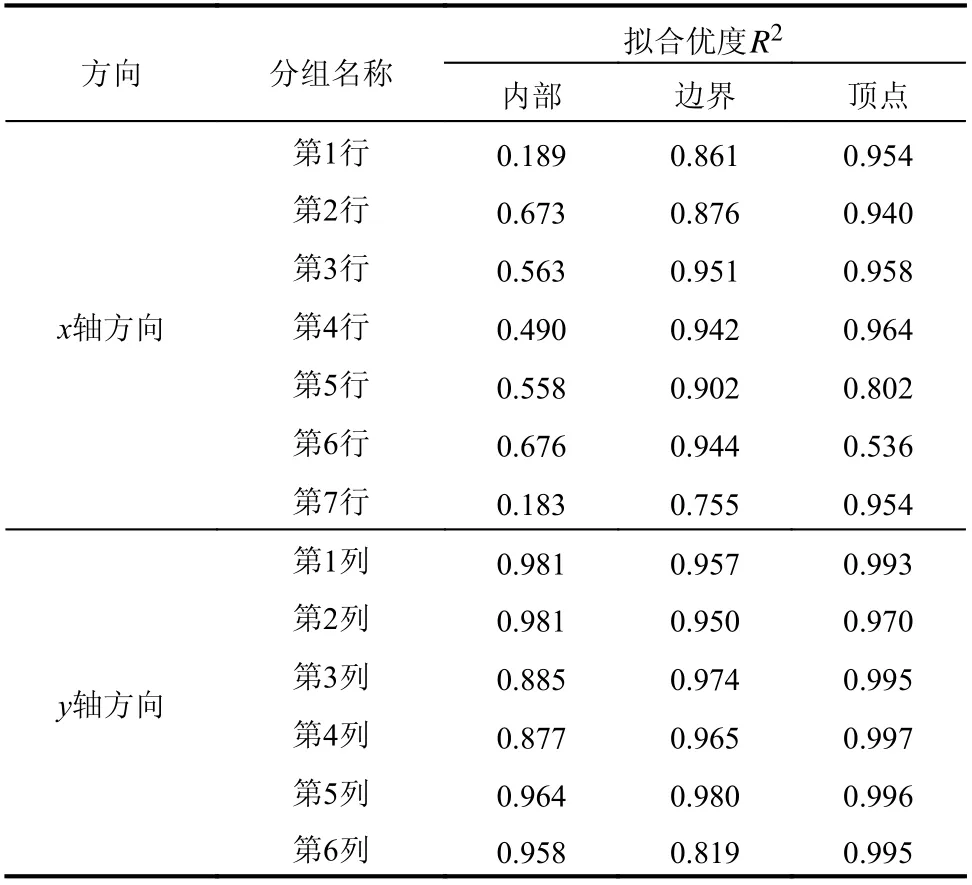
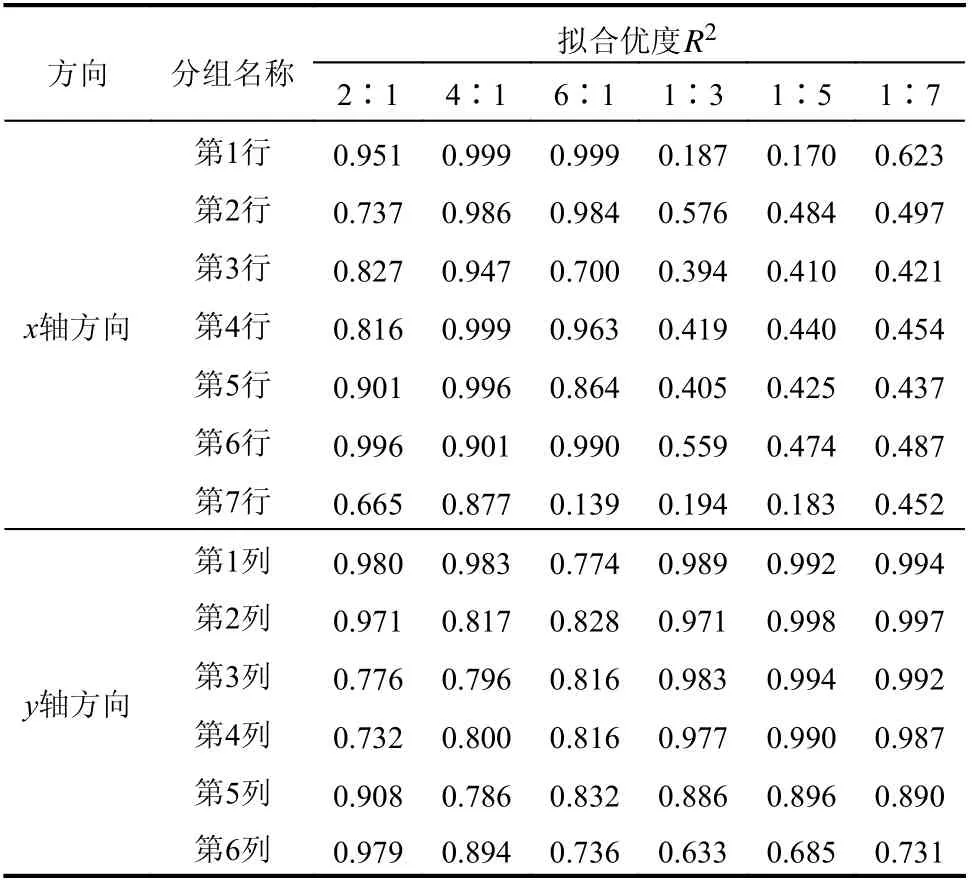
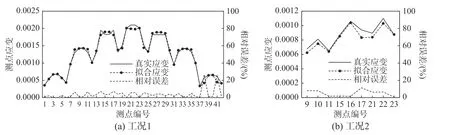
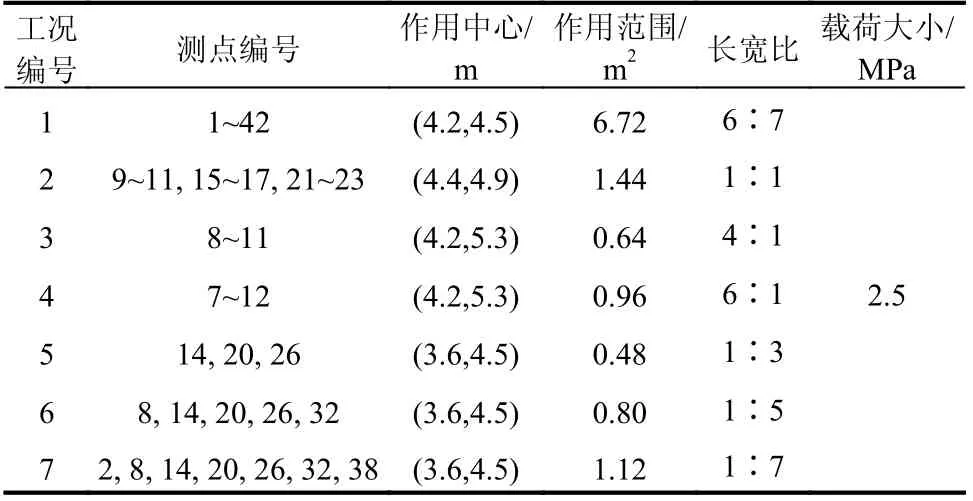
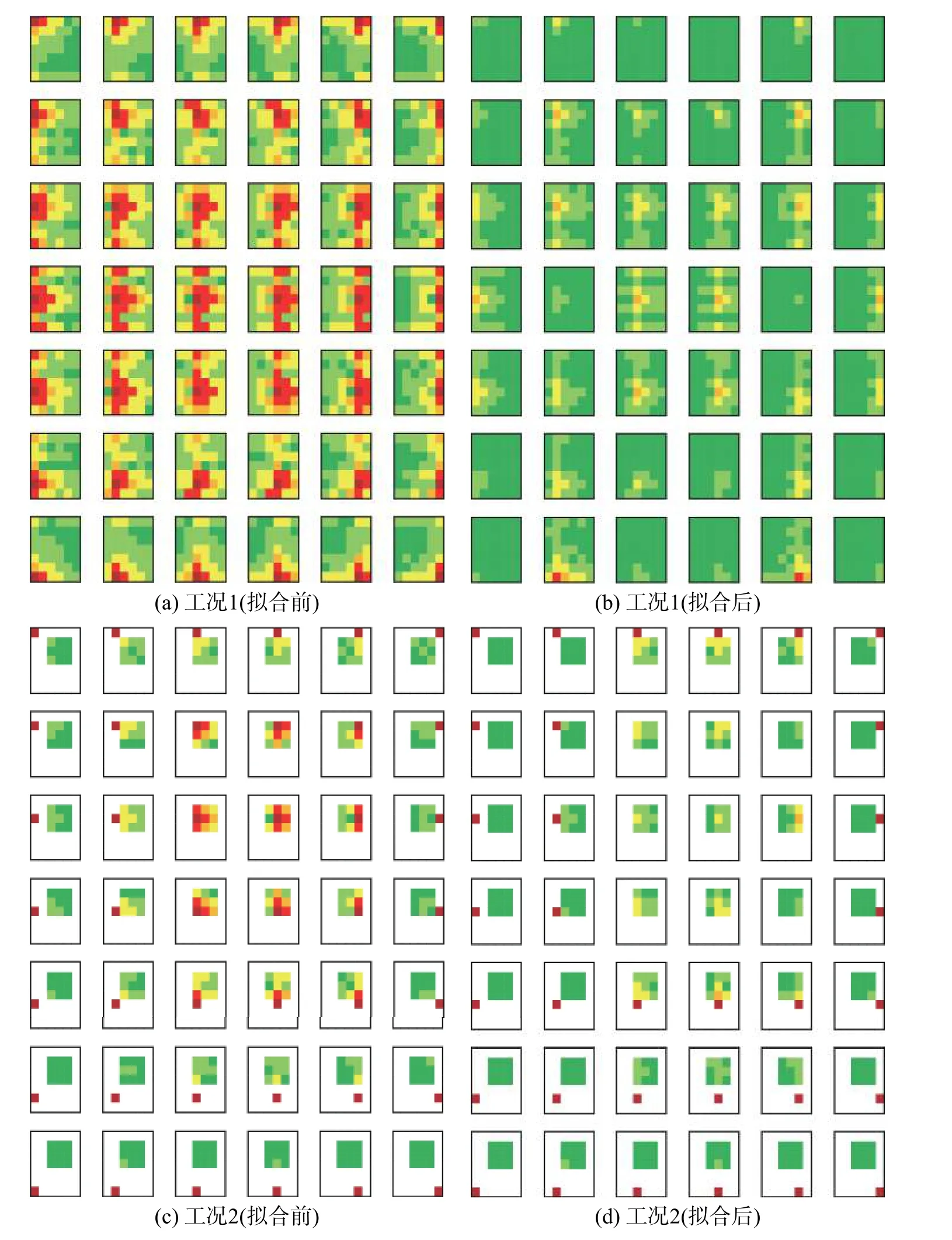
式中:φ0(X),φ1(X),···,φn(X)(n 将该问题转化为求多元函数: 若记: 则式(8)可写作: 将式(11)进一步简化为矩阵形式: 式中:a=(a0,a1,···,an)T;d=(d0,d1,···,dn)T; 即给定应变数据的最小二乘拟合曲线。 3.2.1 “天恩号”多用途冰级船实测应变数据分析 “天恩号”多用途冰级船于2019年7月20日从江苏太仓港启航,沿北极东北航道前往欧洲,最终于2019年8月17日抵达瑞典耶夫勒港。冰区航行期间正值夏季,冰情较轻,仅在2019年8月2日−8月5日观测到密集度较低的小块浮冰。“天恩号”多用途冰级船及冰区航行时的典型冰情如图5所示。 图 5 “天恩号”多用途冰级船及冰区航行时的典型冰情Fig.5 Multi-purpose ice-class ship Tian'en and typical ice condition during its ice navigation 为测量冰载荷,在其艏部左舷水手长储物间内Fr. 231~Fr. 242肋骨的腹板上安装了电阻应变片阵列。监测区域与应变测点的布置如图6所示,在距腹板上端800 mm和下端450 mm处各安装2个互成90°的单向应变片测量垂直于舷侧外板方向的剪应变。 图 6 监测区域与应变测点的布置Fig.6 Layout of monitoring area and measuring points 本文选取2019年8月2日−8月3日共58组海冰冲击事件中的实测应变数据进行分析。由于D区的测点个数较少,因此只将B区和C区的应变测点作为研究对象,沿舷侧纵桁方向将其划分为4组,每组包含5个测点,详细分组情况汇总于表3。 表 3 应变测点的分组情况Table 3 Grouping of strain measuring points 为研究测点应变的空间分布规律,首先绘制各组测点应变峰值关于测点位置的散点图。初步观察发现,测点应变似乎是测点位置的二次函数。为进一步验证上述规律,以二次多项式为拟合函数,取φ=span{1,X,X2},由式(9)~式(14)对这些散点进行最小二乘拟合,并由式(15)计算R2考察拟合优度。图7汇总了58组海冰冲击事件中B区和C区内各组测点应变峰值的二次多项式拟合优度。可以发现,R2在1附近的分布较为密集。因此,通过对“天恩号”多用途冰级船实测应变数据的分析,初步判断二次函数可较为合理地刻画测点应变与测点位置之间的关系。 图 7 各组测点应变的二次多项式拟合优度(天恩号)Fig.7 GOF of quadratic polynomials for strains of each group of measuring points (Tian'en) 图 8 各组测点应变关于测点位置的二次多项式拟合曲线(工况1)Fig.8 Quadratic polynomial fitting curves of strains with respect to coordinates of each group of measuring points (Case 1) 3.2.2 舷侧板架结构有限元应变数据分析 由于“天恩号”多用途冰级船上的应变测点布置较为稀疏、拟合点较少,因此分析结果可能存在一定的偶然性和片面性。为进一步确定测点应变的空间分布规律,下面对典型极地船舶舷侧板架结构的有限元应变数据进行分析。将应变测点沿x轴方向划分为7组,沿y轴方向划分为6组。工况1下各组测点应变关于测点位置的散点图与二次多项式拟合曲线如图8所示。 可以发现,无论是x轴方向还是y轴方向,R2均接近1。由此进一步表明二次函数可较为合理地刻画测点应变与测点位置之间的关系。接下来通过改变载荷的作用中心、作用范围、长宽比等潜在因素,研究载荷工况是否影响测点应变的空间分布规律。需要指出的是,由式(1)可知,当载荷大小变为原来的n倍时,测点应变也会相应变为原来的n倍,因此载荷大小不会影响测点应变的空间分布规律。 3.3.1 载荷作用中心的影响 保持载荷的作用范围为1×1个子域,长宽比为1∶1,依次将作用中心设置为监测区域的内部、边界、顶点,然后在由这些子域组成的加载区域内施加大小为2.5 MPa、方向垂直于舷侧外板的面载荷,具体工况如图9所示。以二次多项式为拟合函数对各组测点应变进行最小二乘拟合,R2汇总于表4。可以发现,y轴方向的R2与x轴相比更普遍接近1,拟合效果更好。这说明作用中心不影响测点应变与测点位置之间的二次函数关系,且此工况下测点应变的空间分布规律在y轴方向上更明显。 图 9 三种载荷作用中心Fig.9 Three load centers 3.3.2 载荷作用范围的影响 保持载荷的作用中心在21号测点所在子域,长宽比为1∶1,依次将作用范围设置为1×1、3×3、5×5个子域,然后在由这些子域组成的加载区域内施加大小为2.5 MPa、方向垂直于舷侧外板的面载荷,具体工况如图10所示。以二次多项式为拟合函数对各组测点应变进行最小二乘拟合,R2汇总于表5。可以发现,y轴方向的R2与x轴相比更普遍接近1,拟合效果更好。这说明作用范围不影响测点应变与测点位置之间的二次函数关系,且此工况下测点应变的空间分布规律在y轴方向上更明显。 表 4 三种载荷作用中心下二次多项式的拟合优度Table 4 GOF of quadratic polynomials under 3 load centers 图 10 三种载荷作用范围Fig.10 Three load ranges 表 5 三种载荷作用范围下二次多项式的拟合优度Table 5 GOF of quadratic polynomials under 3 load ranges 3.3.3 载荷长宽比的影响 依次将载荷的长宽比设置为2∶1、4∶1、6∶1、1∶3、1∶5、1∶7,然后在由这些子域组成的加载区域内施加大小为2.5 MPa、方向垂直于舷侧外板的面载荷,具体工况如图11所示。以二次多项式为拟合函数对各组测点应变进行最小二乘拟合,R2汇总于表6。可以发现,当长宽比大于1时,x轴方向的R2与y轴相比更普遍接近1;当长宽比小于1时,y轴方向的R2与x轴相比更普遍接近1。这说明长宽比不影响测点应变与测点位置之间的二次函数关系,且此工况下测点应变的空间分布规律在载荷长边方向上更明显。此外,测点离加载区域越近,R2越接近1,这说明测点与加载区域之间的距离对拟合效果有影响,当两者间隔超过2个子域时,拟合效果明显下降。 图 11 六种载荷长宽比Fig.11 Six aspect ratios 表 6 六种载荷长宽比下二次多项式的拟合优度Table 6 GOF of quadratic polynomials under 6 aspect ratios 3.4.1 失效测点处应变估算的最小二乘拟合方法 通过对测点应变的空间分布规律及其潜在影响因素的综合分析发现,最小二乘拟合方法可用于估算失效测点处的应变,且二次函数可较为合理地刻画测点应变与测点位置之间的关系,载荷的大小、作用中心、作用范围、长宽比均不影响测点应变的空间分布规律。因此,本文将二次多项式作为拟合函数,取φ=span{1,X,X2},由式(9)~式(14),通过最小二乘拟合建立两者之间的近似关系式 ε∗(X): 再将失效测点的横/纵坐标XF代入式(16),由此得到该点处应变的估算值 εF: 测点应变的空间分布规律通常在x轴或y轴其中一个方向上更明显,且测点与加载区域之间的距离对拟合效果有影响,因此选取拟合点时应遵循以下原则:在选取拟合点之前,首先由式(15)计算并比较二次多项式在失效测点所在行或列上的R2,然后在R2更普遍接近1的方向上选取拟合点进行最小二乘拟合;确保拟合点与加载区域的间隔不超过2个子域,尽量避免失效测点位于拟合点的两侧;对于远离加载区域超过2个子域的失效测点,其对冰载荷识别效果的影响几乎可以忽略不计,因此无须通过最小二乘拟合估算该点处的应变,直接将其替换为0即可。 当失效测点位于加载区域内部时,其对冰载荷识别效果的影响最大,因此按上述拟合方法分别对工况1与工况2下加载区域内失效测点处的应变进行估算,并计算真实值与拟合值之间的相对误差,拟合结果如图12所示。可以发现,真实值与拟合值之间的相对误差普遍低于10%。由此可见,本文提出的最小二乘拟合方法可较为准确地估算失效测点处的应变,为下一步通过影响系数矩阵法识别冰载荷奠定了良好的基础。 3.4.2 失效测点影响下冰载荷识别典型工况分析 为使作用于典型极地船舶舷侧板架结构模型上的载荷工况更加真实、全面、有代表性地反映船-冰接触时海冰施加给船体的局部冰压力,除工况1与工况2之外,再设定5种典型工况以涵盖不同作用中心、作用范围、长宽比的加载形式。以上7种典型工况的基本特征汇总于表7。 图 12 加载区域内失效测点应变拟合结果Fig.12 Fitting results of failure point strains in loading area 表 7 七种典型工况的基本特征Table 7 Basic characteristics of seven typical cases 图 13 最小二乘拟合前后加载区域内失效测点处冰载荷识别值与真实值的对比Fig.13 Comparison of ice load identification values and true values at failure measuring points in loading area before and after LSF 每种典型工况下,最小二乘拟合前后加载区域内失效测点处的冰载荷识别值与真实值的对比如图13所示。可以发现,最小二乘拟合后加载区域内失效测点处的冰载荷识别误差相比于拟合前大幅降低。为更加直观地表现出最小二乘拟合对船体结构冰载荷识别效果的改善情况,针对工况1与工况2绘制了拟合后冰载荷识别误差在加载区域内的空间分布,并与拟合前的分布情况(图3(b)、图4)进行对比,如图14所示。由此进一步表明,本文提出的基于最小二乘拟合的冰载荷识别方法可明显削弱应变测点失效对船体结构冰载荷识别效果的影响。 图 14 最小二乘拟合前后冰载荷识别误差在加载区域内空间分布的对比Fig.14 Comparison of spatial distribution of ice load identification error in loading area before and after LSF 应变测点失效是极地船舶局部冰载荷现场测量中经常发生的状况,可对影响系数矩阵法识别船体结构冰载荷造成显著影响。本文参考国内外典型极地船舶的结构形式,建立了舷侧板架结构的有限元模型,并对监测区域与应变测点进行了合理布置,然后通过2种载荷工况分析了应变测点失效对冰载荷识别效果的影响。为有效削弱这种影响,本文通过对“天恩号”多用途冰级船实测应变数据以及典型极地船舶舷侧板架结构有限元应变数据的深入分析,确定了测点应变的空间分布规律,并由此提出了估算失效测点应变的最小二乘拟合方法。在此基础上,较为准确地识别出7种典型工况下的冰载荷,大幅降低了冰载荷识别误差,最终验证了本方法的有效性。主要结论如下: (1) 应变测点失效可对船体结构冰载荷识别效果造成显著影响。失效测点离加载区域越近,冰载荷识别误差越大;当失效测点位于加载区域内部时,离失效测点越近的子域,其冰载荷识别误差越大;当失效测点与加载区域的间隔超过2个子域时,其对冰载荷识别效果的影响几乎可以忽略不计。 (2) 二次函数可较为合理地刻画测点应变与测点位置之间的关系。载荷的大小、作用中心、作用范围、长宽比均不影响测点应变的空间分布规律;此规律通常在沿舷侧纵桁方向或沿肋骨方向上更明显;测点与加载区域之间的距离对拟合效果有影响,当两者间隔超过2个子域时,规律性明显减弱。 (3) 最小二乘拟合方法可较为准确地估算失效测点处的应变,真实值与拟合值之间的相对误差普遍低于10%。基于最小二乘拟合的冰载荷识别方法可显著降低加载区域内失效测点处的冰载荷识别误差,明显削弱应变测点失效对船体结构冰载荷识别效果的影响。 本文提出的失效测点影响下基于最小二乘拟合的冰载荷识别方法简单有效、适用性强。下一步可将其引入船体结构冰载荷的现场测量中,以验证本方法的工程可靠性。







3.2 测点应变的空间分布规律



3.3 载荷工况对测点应变空间分布规律的影响




3.4 失效测点影响下船体结构冰载荷的识别



4 结论
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
舰船科学技术(2022年20期)2022-11-28 08:19:52
电子学报(2022年2期)2022-04-18 14:42:24
煤炭工程(2021年7期)2021-07-27 09:34:20
汽车实用技术(2021年10期)2021-06-04 07:51:00
物理学报(2018年10期)2018-06-14 08:48:48
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
水利水电科技进展(2014年1期)2014-10-17 02:29:14
中国舰船研究(2014年6期)2014-05-14 06:45:17