
CSI Intelligent Feedback for Massive MIMO Systems in V2I Scenarios
2021-07-14 09:06ShiyiWangYongLiao
China Communications 2021年7期
Shiyi Wang,Yong Liao*
School of Microelectronics and Communication Engineering,Chongqing University,Chongqing 400044,China
Abstract: With the rapid development of the Internet of vehicles (IoV),vehicle to everything (V2X)has strict requirements for ultra-reliable and low latency communications (URLLC),and massive multiinput multi-output(MIMO)channel state information(CSI) feedback can effectively support URLLC communication in 5G vehicle to infrastructure (V2I) scenarios.Existing research applies deep learning (DL)to CSI feedback,but most of its algorithms are based on low-speed outdoor or indoor environments and assume that the feedback link is perfect.However,the actual channel still has the influence of additive noise and nonlinear effects,especially in the high-speed V2I scene,the channel characteristics are more complex and time-varying.In response to the above problems,this paper proposes a CSI intelligent feedback network model for V2I scenarios,named residual mixnet(RM-Net).The network learns the channel characteristics in the V2I scenario at the vehicle user (User Equipment,UE),compresses the CSI and sends it to the channel; the roadside base station (Base Station,BS) receives the data and learns the compressed data characteristics,and then restore the original CSI.The system simulation results show that the RM-Net training speed is fast,requires fewer training samples,and its performance is significantly better than the existing DL-based CSI feedback algorithm.It can learn channel characteristics in high-speed mobile V2I scenarios and overcome the influence of additive noise.At the same time,the network still has good performance under high compression ratio and low signal-to-noise ratio(SNR).
Keywords:Internet of vehicles; high speed mobility;CSI feedback;deep learning;denoising
I.INTRODUCTION
With the rapid development of the Internet of vehicles(IoV)[1],vehicle to everything(V2X)communication has become a key technology for vehicle services[2].V2X mainly includes vehicle to infrastructure (V2I),vehicle to vehicle (V2V) and vehicle to pedestrian(V2P).V2I,as an important part of intelligent transportation systems (ITS),plays a key role in the efficient operation of ITS.For the V2I scenario of the IoV,vehicle users have extremely high requirements for ultra-reliable and low latency communications(URLLC) [3]in practical applications,which is also an important factor in ensuring road traffic safety.In the current V2I scenario,the speed of the vehicle terminal can reach more than 100km/h,which means that the high-speed moving vehicle terminal will aggravate the Doppler effect,cause rapid channel changes,and cause inter carrier interference(ICI),and then lead to deterioration of communication system performance.Therefore,in order to eliminate ICI and improve the performance of the communication system,obtaining accurate channel state information(CSI) is essential for the URLLC design of the roadside base station(BS).
With the development of 5G-V2X,in the future,roadside BS will deploy large-scale antenna arrays.To this end,frequency division duplexing(FDD)massive multi-input multi-output (MIMO) CSI feedback,as a key technology in the V2I communication of the IoV,which can effectively support URLLC in the V2I scenario and continued to receive attention[4].However,the use of massive MIMO antenna arrays will lead to a sharp increase in CSI feedback overhead[5]and will be affected by additive noise and nonlinear effects in the channel,resulting in system performance degradation.
In order to reduce the CSI feedback overhead,an effective method is to compress the CSI matrix.With the development of artificial intelligence(AI)and deep learning(DL),classical neural network structures including ResNet [6]and InceptionNet [7]have been proposed,which inspired researchers to apply DL to CSI feedback to overcome the shortcomings of traditional algorithms,reduce system overhead and improve system performance.Literature[8]proposes an autoencoder model named CsiNet for CSI compression and recovery,in which the downlink CSI is compressed into low-dimensional codewords at the vehicle user(VE),transmitted through the channel,and then the BS receives and restores the feedback codewords to obtain better CSI feedback performance.Since then,scholars have extended the model.Literature[9]uses the correlation between uplink and downlink CSI and proposes a method of restoring downlink CSI through uplink CSI to reduce CSI feedback overhead.Literature [10]designed an algorithm based on convolutional neural network(CNN)to achieve multi-rate CSI feedback.The DNNet proposed in[11]improves the system performance without adding additional information by overcoming the influence of feedback noise.Literature[12]combined DL and superposition coding for CSI feedback.The CS-ReNet proposed in[13]first uses compressive sensing technology to compress at the UE,and then uses DL-based ReNet to reconstruct CSI at the BS.
However,existing DL algorithms are generally based on indoor or low-speed outdoor environments,and assume that the feedback link is perfect,so they cannot adapt to the complex and time-varying channel characteristics in high-speed V2I scenarios,resulting in a significant reduction in algorithm performance and inability to obtain accurate downlink channel characteristics.In response to the above problems,this paper proposes a DL-based massive MIMO CSI feedback network in high-speed V2I scenarios,called Residual Mix-Net (RM-Net).The specific contributions of this article are as follows:
(1)The proposed RM-Net can adapt to the channel characteristics of the doubly selective fading channel,overcome the influence of additive noise in the feedback link,and still has good algorithm performance under the conditions of high compression rate and low signal-to-noise ratio (SNR).At the same time,new network models such as deep convolutional neural network (DCNN),group convolutional neural network(GCNN),deep convolutional neural network,deeply separable convolutional neural network(DSCNN)are used in RM-Net,which greatly reduces the amount of model parameters.Introduce the residual block(RB)structure to effectively prevent the degradation of the deep network.Add the batch normalization(BN)layer,gradient clipping,exponential linear unit(ELU)activation function,and feature standardization to improve training speed,optimize the network model,and strengthen the learning ability and generalization performance of the network.System simulation results show that RM-Net has the advantages of fast training speed and fewer training samples.At the same time,the algorithm performance is significantly better than other DL algorithms,and RM-Net still has better performance under high compression ratio and low SNR.
(2) RM-Net can be regarded as an end-to-end network model.The VE performs CSI compression,accelerates network training through standardized processing,uses fully connected (FC) and GCNN networks to learn the nonlinear characteristics of doubly selective channels,and introduces RB to optimize the convolutional network,and finally uses the FC layer to compress the data,and controls the CSI compression rate by setting the number of FC layer neurons.After CSI compression,channel noise is added.Perform CSI recovery in roadside BS,reduce noise and optimize data features through standardization,learn data features through GCNN,DCNN,and DSCNN,use RB to optimize the convolutional network,and finally recover CSI through the FC layer.
The organization structure of this paper is as follows.Section II describes the massive MIMO CSI feedback system model in high-speed V2I scenarios.Section III introduces the principle and training method of the proposed RM-Net algorithm.Section IV gives and analyzes the simulation results.Section V summarizes the paper.
II.SYSTEM MODEL
The V2I scene has the characteristics of high-speed vehicle movement and limited moving area.Therefore,this paper uses the extended vehicular A model(EVA) [14]as the V2I channel model and considers the Doppler frequency shift and multipath effect in the channel.The channel impulse response in V2I scenario can be expressed by the following formula.

whereLis the is the total number of channel taps,hl(n)represents the channel impulse response complex gain at the time of thel−th tap,n,τlrepresents the time delay of each tap,andfd,lrepresents the maximum Doppler shift under thel−th tap.
At the same time,consider a single-cell downlink massive MIMO system.The roadside BS is equipped withNt >>1 transmitting antennas,and the VE is equipped withNr ≥1 receiving antennas.The system runs on the orthogonal frequency division multiplexing (OFDM) system ofNcsubcarriers.The received signal at n subcarriers is shown in the following formula.


In a massive MIMO system,due to the large number of antennas at the transmitting and receiving ends,the antenna spacing is small,and there is a certain correlation between the antennas,theNr × Ntchannel matrix with spatial correlation can be expressed by the following formula.

where Rr ∈RNr×Nrrepresents the acceptance correlation matrix,Rt ∈RNt×Ntrepresents the transmission correlation matrix,and Hiid ∈CNr×Ntrepresents an independent and identically distributed(IDD)complex Gaussian random matrix with a mean value of 0 and a variance of 1.
Assuming that uniform linear array antennas are installed at both ends of the wireless link,the spatial correlation matrix can be obtained through the Clarke[15]model,any element in Rror Rtisrij,andrijis the correlation coefficient between thei−th antenna and thej−th antenna at the transmitting end or receiving end,and its expression is as follows:

whereJ0(·) represents the first kind of zero-order Bessel function,iandjrepresent the antenna array element number,dijrepresents the distance between thei−thj−th transmitting or receiving antenna,drepresents the distance between adjacent transmitting or receiving antennas,andλrepresents the carrier wavelength.
In the high-speed V2I scenario,the VE returnsto the roadside BS through the feedback link.At the same time,the total amount of feedback parameters iswhich is not allowed for limited feedback links,and CSI compression must be performed.
In summary,the CSI compression feedback process based on RM-Net is as follows:
(1)Once the VE side obtains the channel matrix H through channel estimation,the Encoder can be used to compress the CSI to form a compressed codeword.
(2) The compressed codeword is returned to the roadside BS through the channel.
(3)The roadside BS uses the decoder to decode the compressed codewords to obtain the final channel matrix.
III.RM-NET DESIGN
3.1 RM-Net Signal Processing
The DL-based RM-Net and data processing flow proposed in this paper is shown in Figure 1.
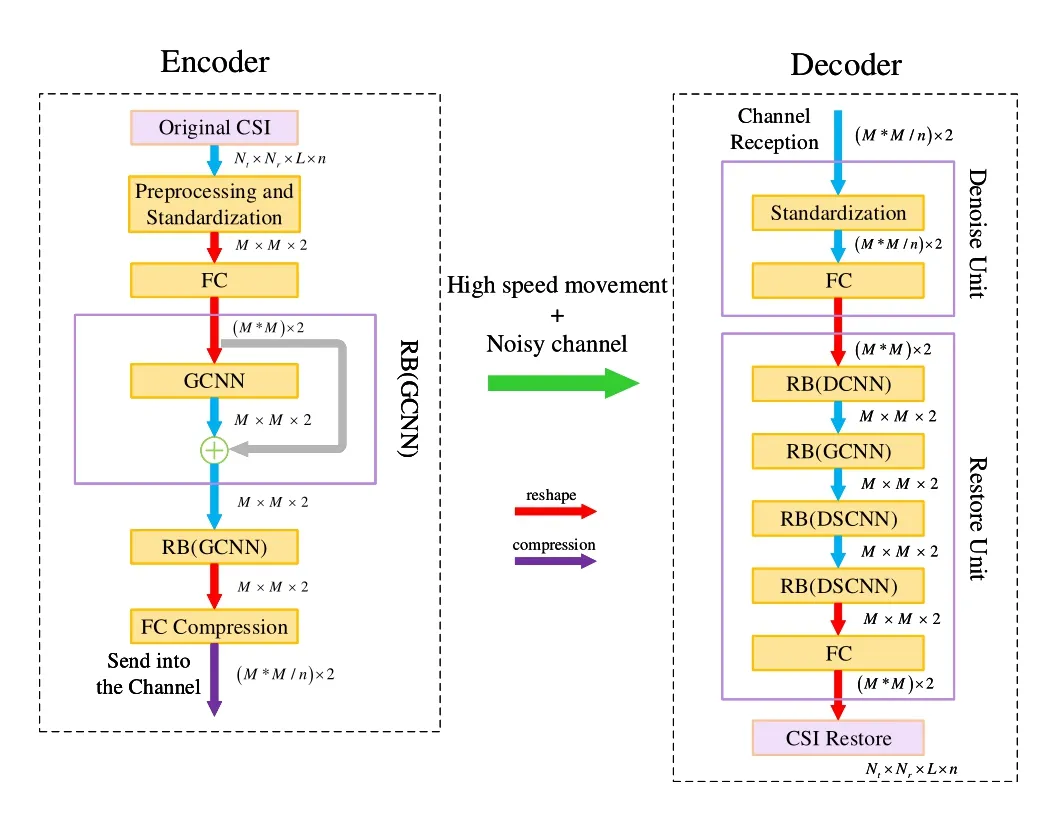
Figure 1.RM-Net data processing flow.
The network is divided into two parts: encoder and decoder.Decoder is divided into two parts: noise processing unit and decompression unit.
According to the RM-Net network structure shown in Figure 1,the following describes the data stream processing process in different networks in Encoder and Decoder.
(1)Compression
In the encoder network,the input data of the network is anNt × Nr × L × n-shaped channel matrix,that is,the input data is H∈CNt×Nr×L×n,whereNt,Nr,Landnrepresent the number of transimitting antennas,the number of receiving antennas,the number of multipath delays,and the number of symbols transmitted by the antenna in each subframe.Since the channel matrix H is a complex signal,it needs to be preprocessed before being sent to RMNet for training.Here,the shape of H is transformed first,the transformed matrix is H′ ∈CM×M,whereM ×M=Nt ×Nr ×L×n,and then the real and imaginary parts of H′are extracted separately as new dimensions to obtain matrix H′′ ∈CM×M×2,and H′′is used as the training sample of the network.And mark the training sample as X.
After the channel matrix H is preprocessed,it can be sent to the network for training.First,the training sample X is subjected to data standardization.After the sample is standardized,the data is extracted and compressed through different network structures.Feature extraction is composed of FC and GCNN,and BN and ELU activation functions are added after FC and GCNN to speed up network training,improve the learning ability of network nonlinear features,and introduce RB to prevent deep network degradation.
(2)Decompression
The roadside BS receives s through the antenna and restores it through the decoder.Decoder first performs denoising and feature dimension expansion on s.This structure is shown in Denoise Unit in Figure 1 and consists of a standardized structure and FC layer.The output of this structure is denoted as s′,where s′ ∈Cn×2.s′is then restored by the Decoder,and the structure is shown by the Restore Unit in Figure 1.s′extracts feature through DCNN[16],GCNN[17],and doublelayer DSCNN[18]respectively,and adds the BN[19]layer,ELU activation function and RB [20]to it.Finally,the original CSI is restored through the output layer-the FC layer.The restored CSI is marked as X′,where X′ ∈CM×M×2is consistent with the original signal shape.RM-Net learns the channel characteristics in high-speed mobile scenes through the continuous looping process,gradually improves the fit of the network,and continuously reduces the error between X′and X,and the final error tends to be consistent within the acceptable range.
3.2 RM-Net Training and Prediction
All algorithms in this paper use offline training and online prediction for data processing,collect channel data through MATLAB,and use Pytorch to build a network model to perform offline training and online prediction on the collected channel data.Based on the EVA channel model,this paper builds a massive MIMO CSI feedback system based on a high-speed V2I scenario,uses the MIMO channel data in this scenario as training set,test set,and verification set,and uses an end-to-end approach to train the network.RMNet network training uses Adaptive Moment estimation (ADAM) to update network parameters,and the loss function is Mean Squared Error (MSE),so the prediction loss of the model is as follows.

where H∗is the target value,Hiis the predicted value,andMsis the total number of samples in the training set.The parameters and related software and hardware configurations used in the model training in this article are shown in Table 1.
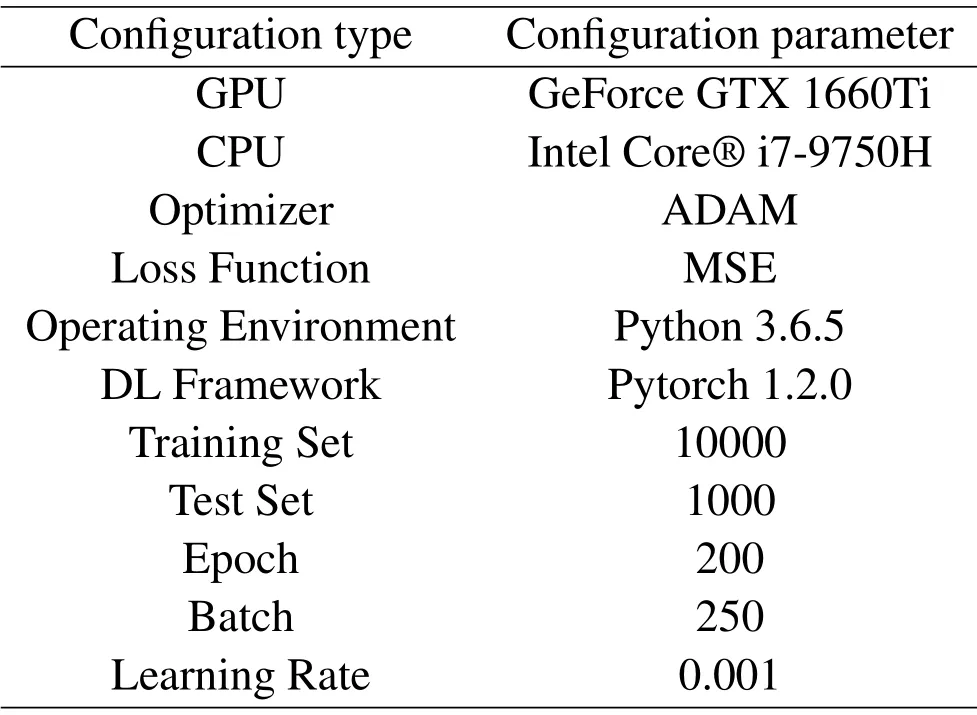
Table 1.Model training parameters and related software and hardware configuration.
IV.SIMULATION RESULTS AND ANALYSIS
In this section,in order to verify the performance of the proposed algorithm in a massive MIMO CSI feedback system in a high-speed V2I scenarios,RM-Net will be compared with other typical DL-based CSI feedback algorithms,and it is assumed that VE has achieved the ideal downlink CSI.The main parameters of the simulation system are shown in Table 2.
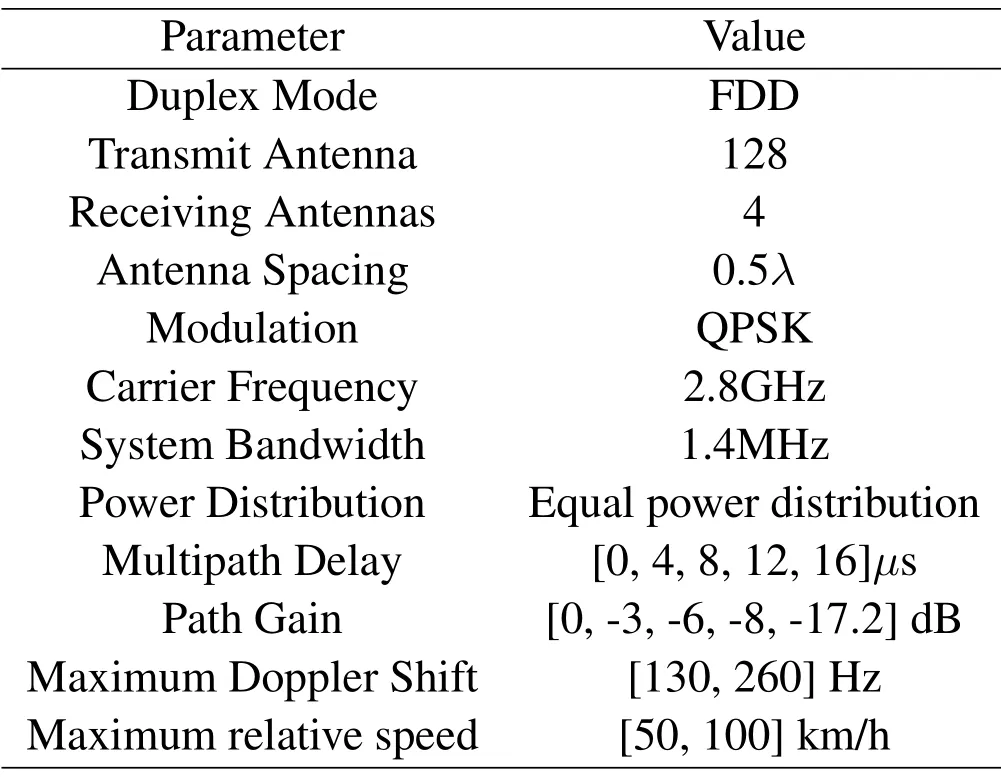
Table 2.Main parameters of the simulation system.
4.1 Normalized Mean Square Error
This section compares the normalized mean square error (NMSE) of RM-Net and other typical DL-based CSI feedback algorithms under different compression ratios and high-speed V2I scenarios in massive MIMO systems.The NMSE calculation formula is as follows:
where X and X′represent the original data and the restored data respectively.The smaller the NMSE,thesmaller the CSI feedback error and the better the algorithm performance.Figure 2 and Figure 3 show the system simulation results of NMSE at different compression rates at 50km/h and 100km/h respectively.
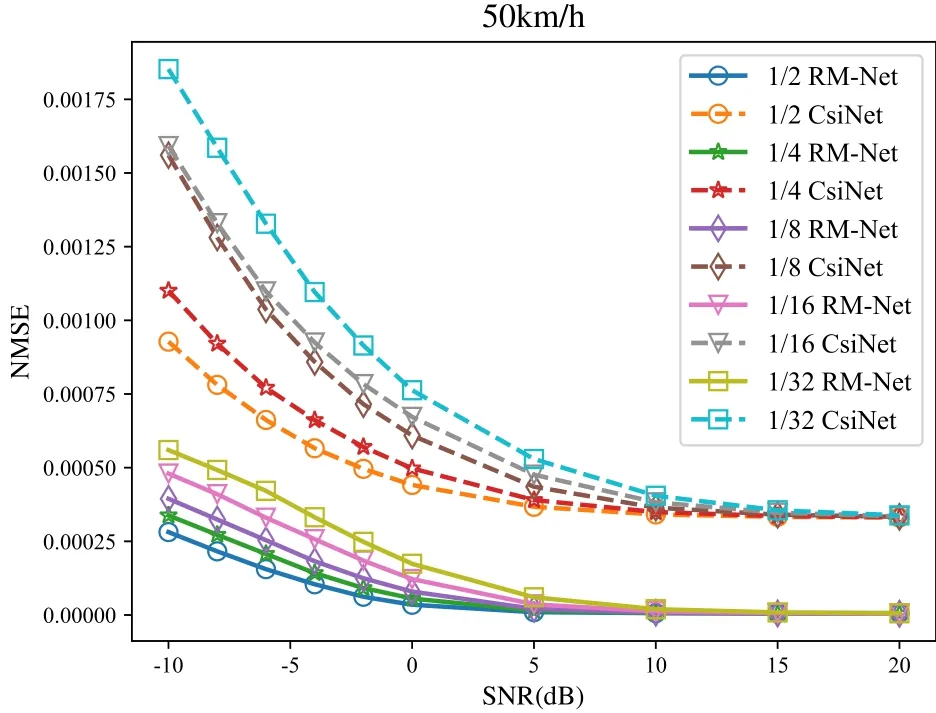
Figure 2.Simulation results of NMSE at v=50km/h.
Figure 2 and Figure 3 are the comparison of NMSE between RM-Net and CsiNet at different compression rates at 50km/h and 100km/h.CsiNet is a typical DLbased CSI feedback algorithm.It can be seen from the Figure 2 and Figure 3 that under different speeds and different compression ratios,the NMSE of the proposed RM-Net is much lower than that of CsiNet,which reflects that the proposed RM-Net has excellent algorithm performance.
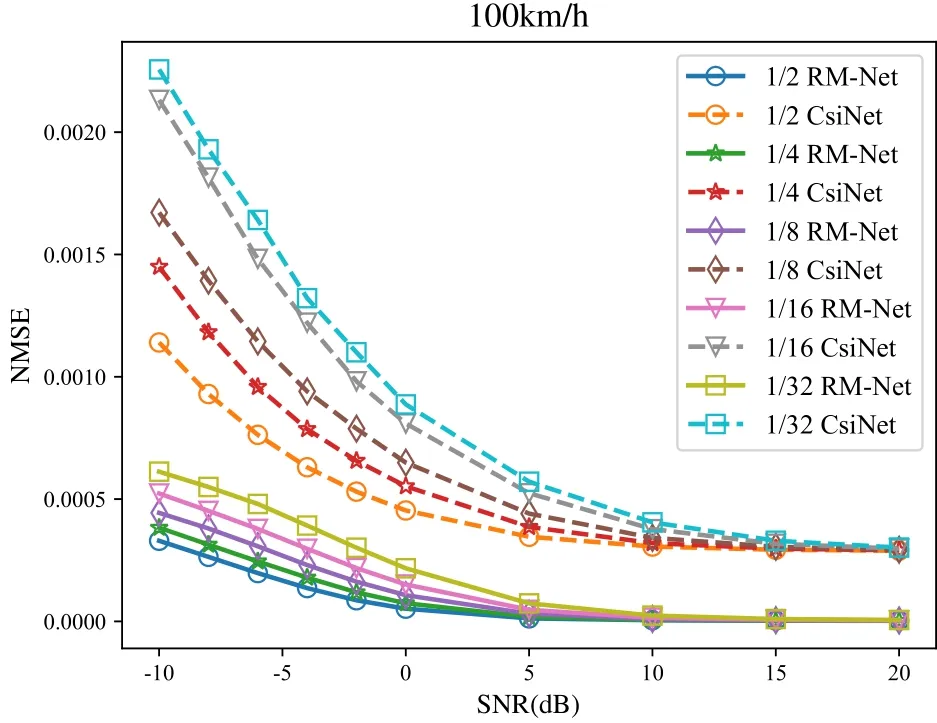
Figure 3.Simulation results of NMSE at v=100km/h.
4.2 Similarity
This section compares the cosine similarity between RM-Net and other typical DL-based CSI feedback algorithms under different compression ratios and highspeed V2I scenarios in massive MIMO systems.The calculation formula is as follows:
The higher theρ,the smaller the CSI compression feedback error and the better the algorithm performance.Figure 4 and Figure 5 show the system simulation results ofρat different compression rates at 50km/h and 100km/h respectively.
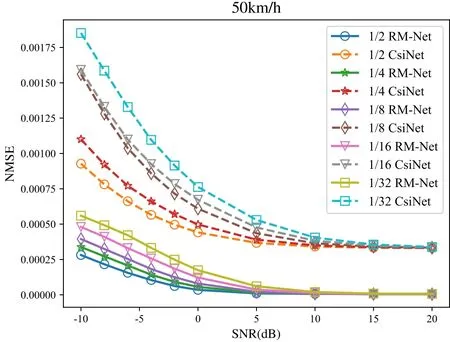
Figure 4.Simulation results of ρ at v=50km/h.
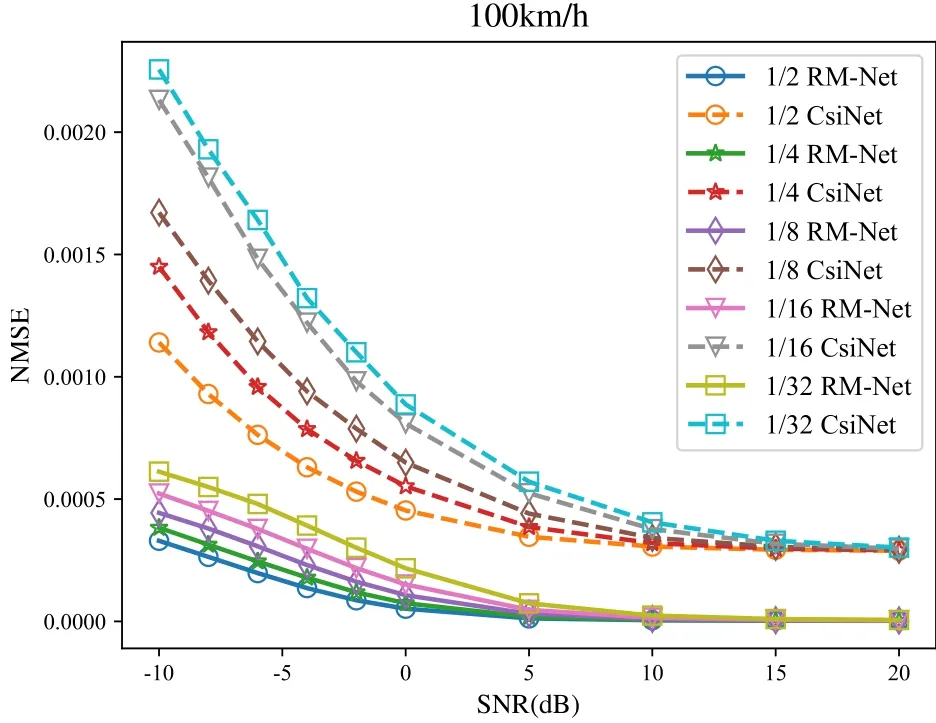
Figure 5.Simulation results of ρ at v=100km/h.
Figure 4 and Figure 5 are the comparison between RM-Net and CsiNet at different compression ratios at 50km/h and 100km/h.It can be seen from the figure that at different speeds and different compression ratios,the proposed RM-Net is much higher than CsiNet,and at the same time,CsiNet in the figure is around 0.7,indicating that the structure of CsiNet is too simple to fully learn and adapt to the doubly selective channel characteristics in the high-speed V2I scenarios.
4.3 System Time Overhead
This section compares the system time overhead of RM-Net and other typical DL-based CSI feedback algorithms under different compression ratios in highspeed V2I scenarios,including the time overhead of CSI compression and CSI recovery.System time overhead can reflect the time complexity of different algorithms.The shorter the system time overhead,the lower the time complexity of the algorithm.Table III shows the system simulation results when the compression ratio is 1/2,1/4,1/8,1/16,and 1/32 at speeds of 50km/h and 100km/h.
It can be seen from Table 3 that compared to CsiNet,RM-Net is slightly higher than CsiNet at different compression rates at 50km/h and 100km/h speeds,but the difference is only 3/100 milliseconds.Within this system,the gap is not obvious and can be ignored,and CsiNet cannot correctly recover the original CSI under this system environment,while RM-Net guarantees the accuracy of CSI recovery,indicating that RM-Net still has better algorithm performance.Insummary,compared with other DL-based feedback algorithms,RM-Net can adapt to different high-speed V2I scenarios,and still has better performance under high compression rate and low SNR,which also proves the effectiveness of the proposed algorithm.
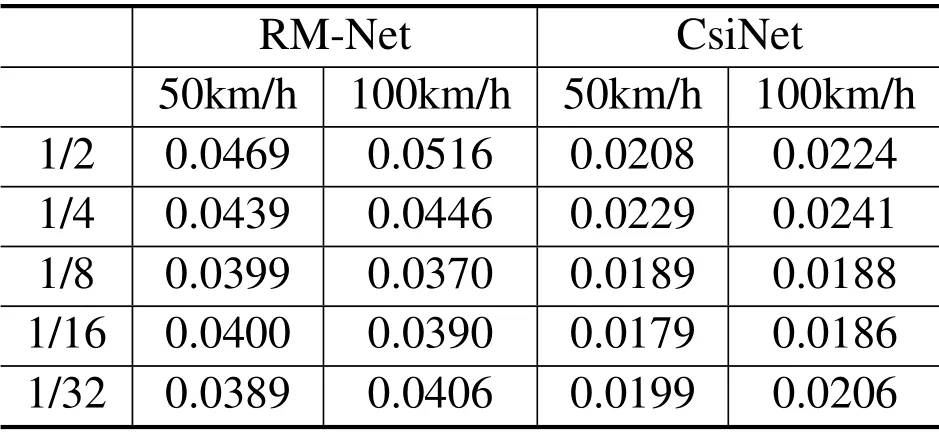
Table 3.System time overhead for different compression ratios(unit: millisecond).
V.CONCLUSION
This paper studies the CSI compression feedback algorithm for massive MIMO systems in high-speed V2I scenarios.Existing DL-based feedback algorithms are mostly based on low-speed outdoor or indoor environments and assume that the feedback link is perfect.In response to the above problems,this paper proposes an RM-Net network model based on deep learning and applies it to high-speed V2I scenarios.Through offline training,the model can fully learn the characteristics of doubly selective channels in high-speed V2I scenarios and improve the system performance of CSI compression feedback.System simulation results show that,compared with other DL feedback algorithms,RM-Net can ensure lower NMSE and higher similarity,while still maintaining low system time consumption.And it has the advantages of shorter model training time,fewer training samples,overcoming the influence of additive noise,and tracking and learning channel characteristics in high-speed V2I scenarios.At the same time,under the conditions of high compression rate and low SNR,the proposed model still has good performance.
ACKNOWLEDGEMENT
This work was supported by the National Natural Science Foundation of China (No.61501066)and Natural Science Foundation of Chongqing (No.cstc2019jcyj-msxmX0017).
- China Communications的其它文章
- Joint Topology Construction and Power Adjustment for UAV Networks: A Deep Reinforcement Learning Based Approach
- V2I Based Environment Perception for Autonomous Vehicles at Intersections
- Machine Learning-Based Radio Access Technology Selection in the Internet of Moving Things
- A Joint Power and Bandwidth Allocation Method Based on Deep Reinforcement Learning for V2V Communications in 5G
- Better Platooning toward Autonomous Driving: Inter-Vehicle Communications with Directional Antenna
- Reinforcement Learning Based Dynamic Spectrum Access in Cognitive Internet of Vehicles