
增强现实虚实融合技术辅助在乙状窦后入路开颅手术中的应用效果▲
2021-07-07 00:23曾祥博叶远良
广西医学 2021年8期
曾祥博 叶远良 李 连 朱 达 李 傲 龙 浪
(广西柳州市人民医院神经外科,柳州市 545006,电子邮箱:zengxiangbo203@163.com)
乙状窦后入路是神经外科常用的手术入路之一,该手术入路需要暴露横窦的下缘及乙状窦的后外侧缘,临床上多采用颅骨表面解剖学标志来确定关键孔(横窦下缘与乙状窦后缘交界处),在颅骨外表面指引开颅,常用的解剖学标记有星点、上项线、二腹肌沟等[1-3]。但星点与横窦-乙状窦移行处的位置关系存在很大的解剖变异,有研究发现,使用CT颅骨成像技术可以精确定位横窦-乙状窦移行处,尽可能做到个体化治疗,减少不必要的损伤[4-5]。本研究探讨增强现实虚实融合技术辅助在乙状窦后入路开颅手术中的应用效果。
1 资料与方法
1.1 临床资料 回顾性分析2019年1~7月期间在我院行增强现实虚实融合技术辅助下经枕下乙状窦后入路手术治疗的40例患者的临床资料。纳入标准:(1)所有患者术前均行3D-CT或者3D-CT血管造影检查;(2)符合经枕下乙状窦后入路手术治疗指征,包括小脑脑桥角区和岩骨斜坡区病变(如神经鞘瘤、脑膜瘤、表皮样囊肿、室管膜瘤等)、三叉神经痛和面肌痉挛等;(3)后颅窝骨质3D重建后枕乳缝、星点、二腹肌沟显影清晰可见。排除标准:术前未进行头颅CT检查或者头颅CT颅骨重建后枕乳缝、星点、二腹肌沟显影不明显患者,有手术禁忌证者。其中男性21 例,女性19例,年龄28~75(47.5±13.7)岁;疾病类型包括:听神经瘤20例、面肌痉挛12例、脑膜瘤8例;23例行头颅CT检查,17例行头颅CT血管造影检查。
1.2 方法
1.2.1 颅骨三维重建:所有患者术前均完善颅骨1 mm薄层CT扫描,采用飞利浦Brilliance 64层螺旋CT进行检查,扫描参数:1.0 mm/层,0.5 mm/层间距,电压120 kv 自动调节,电流240 mh,旋转时间0.33 s/rot,螺距1.0。CT血管造影检查:患者经肘前静脉注入45 mL非离子型造影剂碘普罗胺注射液370 mgI/mL,注射速率为5 mL/s,触发阈值130 Hu,监测扫描延迟时间12 s,跟注生理盐水量30 mL,速率5 mL/s。告知患者检查时需要静脉使用的造影剂和检查时间、过程,检查过程中确保患者头颈部在平扫及增强扫描时位置不变,以避免减影偏差。扫描范围从颈 1椎体水平到颅顶水平,扫描方向自颅底向颅顶扫描。在影像学工作站通过颅骨容积重建系统(Volume系统)生成患者的颅骨三维图像并进行视图操作,在Volume界面的基本裁剪选择自由裁剪,去除健侧颅骨及患侧颅骨的部分顶部,从颅骨内侧面可更清楚地观察横窦及乙状窦压迹(图1A),使用自由裁剪剪除横窦及乙状窦沟的压迹骨质(图1B);再通过Volume界面中的自由旋转工具,旋转成手术工作角度的颅骨CT三维图像(图1C),即可清晰观察到颅骨表面标志、横窦沟与乙状窦沟的解剖学结构,选择与手术视角一致的颅骨外表面进行三维重建图像,保存图片数据并上传到手机(或者直接使用手机拍照保存图片),以备术中使用。
1.2.2 增强现实虚实融合技术:新浪神经外科助手是一个用Java代码编写的Android应用程序[6],可将患者的颅骨CT三维重建图像呈现半透明化状态(透明度可调节),并叠加在手机摄像头的取景画面之上,术中由助手协助移动手机位置,将影像学图像与患者实际颅骨完全匹配(图1D),主要匹配信息为枕乳缝、二腹肌沟、星点,即实现虚拟现实技术与增强现实虚实融合技术相融合,在虚拟图片引导下术者使用无菌标志笔在颅骨表面画出“横窦-乙状窦”在颅骨表面位置,标志出横窦-乙状窦(图1E),即可精准定位横窦-乙状窦拐角处的关键孔。
1.2.3 手术操作:患者均采用气管插管全身麻醉,取健侧卧位(颅内桥小脑角病变的对侧卧位),常规消毒铺巾。切口设计:首先标记患者二腹肌沟,沿发迹内侧约1 cm标记6.5 cm左右直切口,使用2%利多卡因20 mL+肾上腺素0.5 mg+生理盐水50 mL局麻浸润麻醉皮内及帽状腱膜层,以二腹肌沟标记点水平为切口中点,依次切开皮肤,分离皮下组织,乳突牵开器牵开枕部肌群,直至暴露颅骨表面,术中需注意要清晰显露骨缝、二腹肌沟及星点等解剖学标志,便于手机软件定位。由助手打开手机增强现实应用程序APP,选择术前已导入的患者颅骨CT三维重建图像,以颅骨的二腹肌沟、骨缝、星点等为匹配标记,调整手机位置使颅骨 CT 三维重建图像(虚图)与实际颅骨(实体)的解剖标记完全重叠(图1D)。术者再根据重合后的模拟“横窦-乙状窦”位置,使用无菌标志笔在实际颅骨表面画出“横窦-乙状窦”颅骨表面投影(图1E),即可定位横窦-乙状窦拐角处的关键孔,钻好关键孔后可显露横窦-乙状窦拐角处(图1F),设计骨窗大小为(2.5±0.5)cm2,再使用铣刀或者咬骨钳沿着“横窦-乙状窦”颅骨表面投影游离适宜骨瓣,暴露横窦-乙状窦拐角处硬膜,完成骨窗开颅操作。骨蜡封闭乳突气房及骨窗缘板障出血,弧形切开硬膜,释放脑脊液,向后下方牵拉小脑,暴露术区。颅内操作完成后严密缝合硬膜,于硬膜表面填压薄层吸收性明胶海绵后还纳骨瓣,使用2~3枚颅骨连接片固定骨瓣,逐层缝合肌肉、皮下组织及皮肤,无须放置引流管。
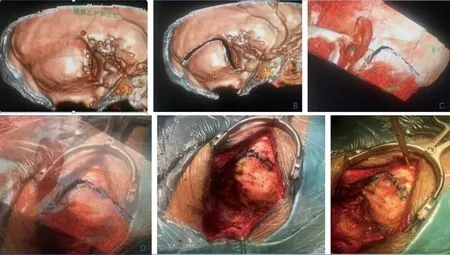
图1 增强现实虚实融合技术辅助乙状窦后入路开颅手术
1.3 观察指标 头皮切口长度、关键孔与横窦乙状窦位置关系、骨窗与静脉窦位置关系、骨窗大小、完成骨窗开颅时间、开颅出血量、关键孔与横窦及乙状窦的距离。其中,头皮切口长度的测量:术前设计切口并使用尺子测量切口长度;关建孔与横窦乙状窦位置关系的判定:术中使用无菌尺子测量关键孔至横窦乙状窦夹角的距离;骨窗与静脉窦位置关系的判定:术中使用无菌尺子测量骨窗缘至静脉窦的最短距离;骨窗大小的判定:术中使用无菌尺子测量骨窗的长和宽,然后将两者并相乘;开颅出血量=吸引瓶中的血水-术中冲洗用的生理盐水;关建孔与横窦及乙状窦的距离的测量:术中使用无菌尺子测量从关键孔至横窦及乙状窦的最短距离。
2 结 果
40例患者均顺利完成手术。采用增强现实虚实融合技术暴露关键孔与静脉窦位置的关系:完全暴露拐角35例(87.5%),单纯暴露横窦3例(7.5%),单纯暴露乙状窦2例(5.0%),无暴露静脉窦0例。骨窗与静脉窦位置关系:一次性铣除骨瓣不需要再咬除骨质(完全暴露到横窦及乙状窦边缘)30例(75.0%);单纯暴露横窦边缘6例(15.0%),需向前外侧咬除(5.0±0.5)mm骨质后即可暴露;单纯暴露乙状窦边缘4例(10.0%),需向上内侧咬除(5.0±0.5)mm骨质后即可暴露;无暴露静脉窦0例。关键孔距离横窦最短距离(0.5±0.3)cm,关键孔距离乙状窦最短距离(0.6±0.3)cm;头皮直线切口长(6.0±0.5)cm,骨窗大小(2.5±0.5)cm2,从切皮到骨窗完成时间(15.0±0.5)min,完成骨窗开颅出血(25.0±5.0)mL,无一例发生静脉窦破裂出血。
3 讨 论
乙状窦后入路是神经外科手术常用的入路之一,经此入路可以处理桥小脑角区病变及责任血管的分离。早在1894年,国外学者就首次成功经枕下入路进入颅后窝外侧和桥小脑角区,切除附着于岩骨后面的脑膜纤维肉瘤,但是术后遗留有三叉神经和面神经损伤;1905年,Harvey教授和Charles教授经小脑半球的双侧入路,即通过切除部分小脑外侧组织,暴露一侧颅后窝,达到切除桥小脑角区病变的目的;1917年,Walter教授提出经单侧枕下开颅,进行桥小脑角区肿瘤瘤内减压,然后全切除神经鞘瘤的瘤壁;随后Perneczky等[7]报告了关于经枕下外侧入路切除听神经瘤的研究。近年来,常规开颅经枕下乙状窦后入路显微切除桥小脑角区肿瘤的手术方式已经成熟,随着神经内窥镜、神经导航技术及神经电生理监测等技术的发展,以往的常规粗放式开颅逐渐向精准化开颅转变,要求做到骨窗小型化、损伤最小化、正常组织保护最大化[8]。在乙状窦后入路开颅过程中,为了更好地暴露桥小脑角区病变及提供更大的操作空间,需要充分显露横窦下缘及乙状窦的内侧缘,设计更精确的骨窗及简便的开颅方式,减少静脉窦的损伤及骨瓣解剖复位,因此,手术入路不正确的定位可造成横窦或乙状窦损伤,导致严重的静脉出血[9-10]。手术入路应根据术前计划和患者个性化解剖结构进行精确定位,早期研究表明,通过体表标志入外耳道上棘、乳突尖和枕外窿突等,可对横窦、乙状窦边界进行体表定位,最大限度地避免损伤静脉窦[11-14],但是通过临床的不断实践,我们发现通过测量体表标志点对深部结构进行精确定位较为困难[15];随后有学者提出颅骨标志定位,利用星点-顶乳缝关系定位乙状窦位置[16];而现阶段使用较多的定位方法为关键孔定位法,即二腹肌沟顶点垂线上方12 mm定位钻孔点来指导骨瓣开颅[3],但这些定位方法很难做到个体化的精准定位。
随着科学技术的发展,增强现实虚实融合技术成为当下最热门的交互技术之一,其理念是在实时媒体中尽可能地融入虚拟现实技术,以此来增强显示用户周围的世界,用户不仅可以感受到真实的场景,也可以感受到系统生成的各种虚拟信息,该项技术易于操控且对使用环境没有太多要求,在游戏娱乐、医疗、军事、古迹复原、工业、电视、旅游、建设、互联网、电子商务等领域存在着广泛的应用前景[17-19]。本研究中,所有患者术前完善头颅3D-CT或3D-CT血管造影后进行三维颅骨重建,可以清晰地显示横窦-乙状窦压迹;然后使用系统自动的颅骨减除功能减除横窦及乙状窦沟的骨质,再通过Volume界面中的自由旋转工具,旋转成手术工作角度的颅骨 CT 三维图像,即颅骨表面可清晰地显示横窦沟与乙状窦沟的走形(被减除的骨质);截图保存图片,把保存好的图片数据发送到手机中,打开手机的增强现实APP,将影像学图像与实际颅骨完全匹配后,在虚拟图片引导下在颅骨表面画出横窦及乙状窦;根据横窦及乙状窦位置可准确地设计出关键孔及骨窗位置,实现个体化精准定位,从而最大限度地降低静脉窦损伤的风险并提高去除骨瓣的精确度,减少开骨瓣的时间。本研究中40例患者的关键孔与静脉窦位置关系:完全暴露拐角35例(87.5%),单纯暴露横窦3例(7.5%),单纯暴露乙状窦2例(5.0%),无暴露静脉窦0例;骨窗与静脉窦位置关系:一次性铣除骨瓣不需要再咬除骨质(完全暴露到横窦及乙状窦边缘)30例(75.0%),单纯暴露横窦边缘6例(15.0%),单纯暴露乙状窦边缘4例(10.0%),无暴露静脉窦0例;关键孔与横窦的最短距离(0.5±0.3)cm,关键孔与乙状窦的最短距离(0.6±0.3)cm;头皮直线切口长(6.0±0.5)cm,骨窗大小(2.5±0.5)cm2,从切皮到骨窗完成时间(15.0±0.5)min,完成骨窗开颅出血(25.0±5.0)mL,无一例发生静脉窦破裂出血。增强现实技术开颅手术与传统定位技术开颅手术不同,由于星点与横窦乙状窦移行处的位置关系存在很大的解剖变异[4-5],导致使用传统定位技术确定的关键孔、横窦、乙状窦位置与实际位置存在一定偏离,术中容易损伤静脉窦及骨窗位置不佳。本研究采用的增强现实技术可以实现个体化图像定位,结果提示,关键孔位置与横窦、乙状窦移行处吻合,去除骨窗的位置比较理想,并且无静脉窦损伤,从而避免大出血,实现了个体化、精确化定位技术开颅手术。
综上所述,采用增强现实虚实融合技术辅助乙状窦后入路开颅手术,可以实现个体化、精确化定位关键孔及横窦乙状窦位置,设计更适宜的骨窗和游离骨瓣,避免不必要的暴露和损伤。但是使用手机增强现实虚实融合技术在临床实践中仍存在许多问题,如术前取图的角度与术中工作角度存在一定的偏移,可导致定位存在一定的偏差;虚拟图片与现实场景匹配的精准度存在一定主观性,不能自行反馈与校正。相信随着科技的不断发展,增强现实虚实融合技术在神经外科领域的应用会具有更广阔的前景,可为神经外科医生提供一种新的、更精确的术前计划及术中导航工具。
猜你喜欢
临床神经外科杂志(2022年2期)2022-05-11
听力学及言语疾病杂志(2021年4期)2021-07-13
口腔医学(2021年3期)2021-03-31
中华养生保健(2020年4期)2020-11-16
中国介入影像与治疗学(2019年10期)2019-10-22
护士进修杂志(2016年18期)2016-12-21
听力学及言语疾病杂志(2016年3期)2016-06-06
中成药(2016年8期)2016-05-17
中成药(2016年4期)2016-05-17
中成药(2014年9期)2014-02-28
