智能网联环境下的PHEV实时优化能量管理策略研究
2021-07-03 02:51杜雪龙王伟达项昌乐
汽车安全与节能学报 2021年2期
杨 超,杜雪龙,王伟达,项昌乐
(1.北京理工大学 机械与车辆学院,北京 100081,中国;2.北京理工大学 重庆创新中心, 重庆 401122,中国)
鉴于能源紧缺和环境污染问题日益严重,车辆节能与环保技术的发展逐步成为汽车行业发展的焦点[1-3]。由于配备了可外接充电的电池组,插电式混合动力汽车(plug-in hybrid electric vehicles, PHEVs)结合了纯电动汽车和常规混合动力汽车的特点,不仅可以实现短行程纯电行驶,同时可以灵活地调节发动机和电机之间的能量分配以实现更好的整车燃油经济性[4]。能量管理策略是PHEV的一个关键组成部分,决定着整车燃油经济性的优劣,而能量管理策略的研究一直是汽车领域学术界与工业界共同关注的焦点课题[5-6]。
目前国内外学者研究的能量管理策略主要有2大类,分别是基于规则的策略和基于优化的策略,后者根据是否可在线实时应用又常被分为实时优化策略和全局优化策略[7-8]。基于规则的策略制定通常依据前期积累的经验规律,具有很强的鲁棒性且易于实现,但不能适应工况的动态变化,因而难以实现理想的控制效果;等效油耗最小化策略(equivalent consumption minimum strategy, ECMS)是较为典型的实时优化策略,其概念是由Paganelli等人提出[9],是一种将全局最小化问题转化为每一步求解瞬时最小化问题的方法。全局优化算法则是依据最优控制理论得到全局最优解,但必须是在具备先验信息的驾驶工况下,代表性的全局优化算法有动态规划(dynamic programming, DP)和Pontryagin最小值原理(Pontryagin’s Minimum Principle, PMP)。目前已经有越来越多的学者将最优控制理论应用到实时能量管理问题的优化中[10]。YANG Chao等考虑等效坡度的影响,提出了一种修正的DP算法以解决最优控制问题[11];杨林等[12]基于DP得到最优电能使用规律,以此指导自适应ECMS实现近似最优的控制效果。Simona团队提出将PMP算法下的常数协态变量应用于混合动力汽车能量管理优化[13]。PENG Jiankun等[14]通过应用最优解下的发动机工作区域改进了规则策略。目前,根据最优控制律优化实时控制策略的方法已被广泛应用于混合动力汽车能量管理[15]。
随着新一代移动互联网技术的发展,车与人、车以及后台等智能信息实现了交换共享,因而车辆的运行状态可以被实时检测,这为解决混合动力汽车能量管理最优控制问题提供了可能。基于此背景,本文提出了一种智能网联环境下的PHEV能量实时优化控制策略。首先采用PMP离线求解整车在特征工况下的全局最优解,同时使用打靶法得到该特征工况的协态变量最优解;进一步根据在不同工况下最优协态值对应的离线控制律,提出在线修正和离线最优融合优化的实时能量管理策略,并在不同随机工况下进行验证,实现了离线最优控制律的在线应用。
1 系统模型描述
本文研究对象为智能网联环境下运行的通勤车辆,主要包括行驶时段和路线固定的城市公交车或企业班车等。在智能网联环境下,通勤车辆的位置信号等状态信息能够和远程监控中心实现实时共享,并接收来自远程监控中心的优化参数信息,实现整车能量管理策略的实时优化,如图1所示。本文采用智能网联通勤线路下的PHEV作为研究对象,其中PHEV采用同轴并联混合动力系统构型。下面将对研究对象系统模型分别进行详细介绍。

图1 智能网联环境下的能量管理策略实时优化架构
1.1 车辆远程监控中心
智能交通系统是将信息技术、数据通讯技术等综合运用于车辆交通运输和服务控制等领域的综合运输系统,远程监控中心(remote monitoring center, RMC)作为智能交通系统中的基础设施,能够实现车辆运行数据的存储、车辆运行状态的实时监控等功能。在此环境下,RMC通过整合车辆历史运行数据,结合实车运行的状态信息,如车速信号、荷电状态、(state of charge SOC)、位置等,可以实现PHEV能量管理的参数优化,然后通过无线通信技术,将优化后的参数信息传递给PHEV整车控制器,更新车辆状态,实现智能网联环境下的整车能量管理策略的实时优化。
1.2 PHEV模型
本文所研究PHEV采用并联混合动力系统构型如图2所示,其主要部件的详细参数由表1给出。根据系统结构特点,发动机和电机之间的离合器通过分离接合可以实现整车在不同运行模式下运行。主要包括5种典型工作模式:发动机驱动模式、纯电驱动模式、混合驱动模式、主动充电模式以及再生制动模式。在实际运行过程中,针对不同的道路条件,整车可结合实时动力需求和自身状态,在这些模式间进行切换,以应对复杂工况,从而达到提升燃油经济性的目的。
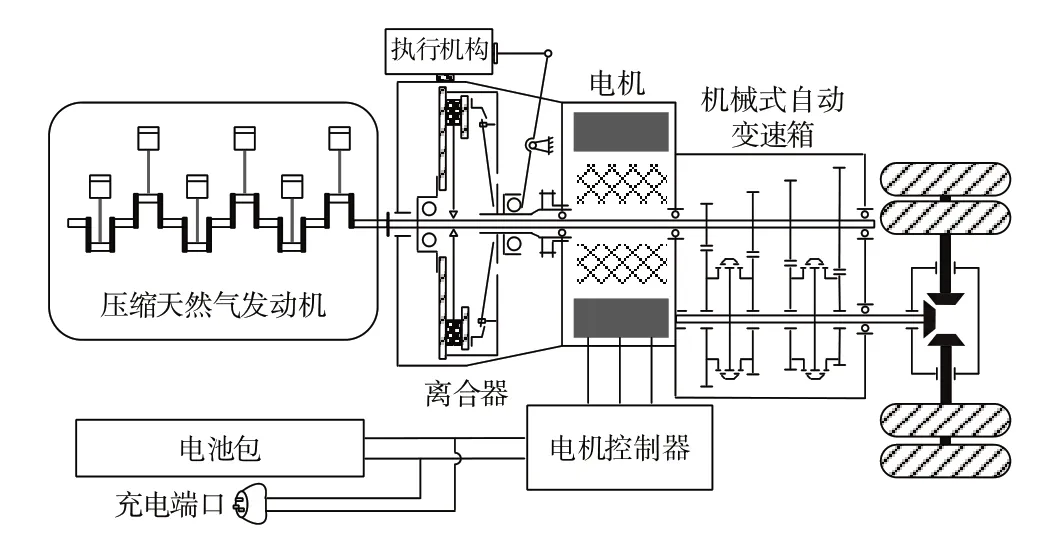
图2 同轴并联混合动力系统构型示意图
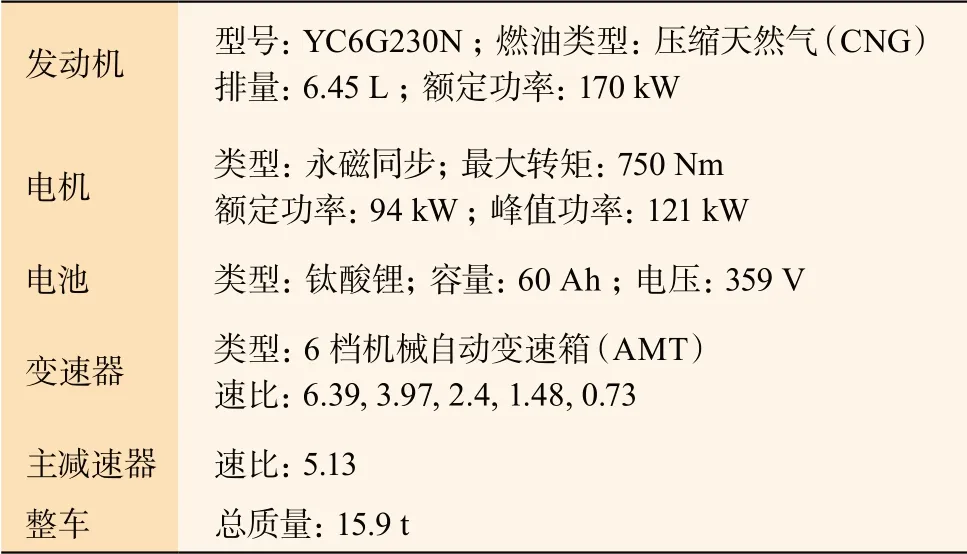
表1 某款PHEV整车参数
车辆处于运动状态时,需要克服各种行驶方向上的阻力[16],结合整车纵向动力学方程,车辆在行驶过程中受到的轮转矩可表示为

其中,Tw为轮转矩;iAMT是AMT变速箱速比;id是主减速器速比;ηr是传动系效率;Te是和Tm分别是发动机转矩和电机转矩;Tb是车轮受到的制动力矩;m为整车质量;g为重力加速度;v是整车当前车速;α为道路坡度;CD是空气阻力因数;ρ是空气密度;A是整车迎风面积;δ是整车旋转质量换算系数;rw是车轮半径。
本文研究的发动机油耗模型可以描述为

其中,Qt为发动机单位时间燃油消耗量(g/s);Te为发动机输出转矩(Nm);ne为发动机转速(r/min);be为发动机有效燃油消耗率(g/kWh),其值可以由发动机油耗数据得到,在不同转速和转矩取值下,得到不同的燃油消耗,对应关系如图3所示。
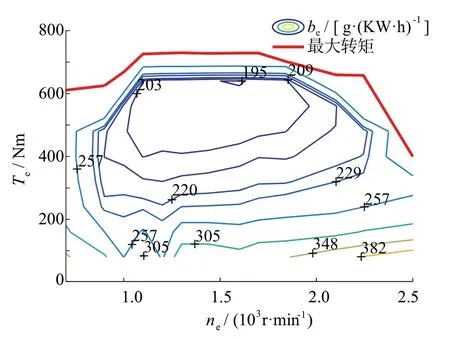
图3 发动机万有特性曲线图
车辆运行时,电机既可用作电动机辅助发动机驱动以满足车辆动力需求,也可作为发电机实现能量回收以满足车辆续航。由上述电机工作特性可以得到其运行功率的计算模型为

其中:Tm和nm分别代表电机的转矩和转速,ηm为电机工作效率,其效率特性图如图4所示。
建立合适的动力电池模型在整车能量管理系统中有着十分重要的作用,由于本文中仅需得到电池的功率输出以及荷电状态(SOC)特性,故可忽略电池内部复杂的电化学反应和热力学问题,可采用Rint模型,在满足精度的同时简化求解过程,动力电池的等效电路电流可以表示为

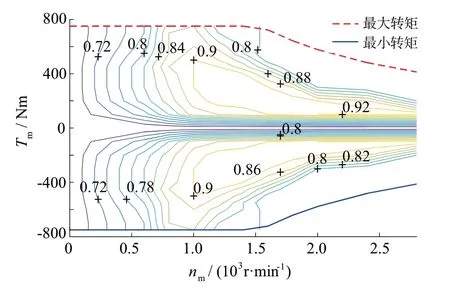
图4 电机效率MAP图
其中:Uoc为动力电池开路电压;R表示电池内阻,在充放电时分别用作充电电阻和放电电阻;Pm为电机功率。通过电流可以继而得到电池的SOC为

其中:SOC0为动力电池初始SOC;Q代表电池容量。
2 智能网联环境下的实时能量管理策略设计
智能网联环境下的通勤车辆通常有固定的行驶时间和路线,结合该特点,本文提出了一种离线和在线融合优化的实时能量管理策略,即通过离线部分收集历史实车运行数据并提取出具有代表性的典型工况数据,用于改进实时控制策略以提升其全局优化效果,本文提出的策略框架如图5所示。
2.1 基于PMP的离线全局最优控制问题求解
混合动力系统控制问题的实质是对来自不同功率源的能量进行瞬时管理,以实现控制目标。这类问题的控制目标通常是整体的,而基于智能交通系统下大量的历史工况数据,可以实现混合动力系统最优控制问题的离线求解。本文采用PMP求解整车在给定工况下能量分配的全局最优解。
在求解有限时域优化问题时,本质上是寻求最优控制律uopt,使目标函数J在 (t0,tf)内取极小值。因此,可以得到目标函数、最优控制律以及状态变量为:
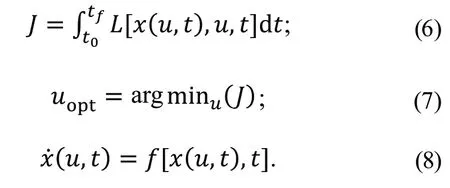
其中:L为瞬时代价函数,x为状态变量。
根据Pontryagin极小值原理,该混合动力系统能量管理问题的Hamilton函数定义为:其中,选取SOC为状态变量;控制律为电机转矩Tm和发动机转矩Te;L为瞬时等效油耗,λ(t)为协态变量。

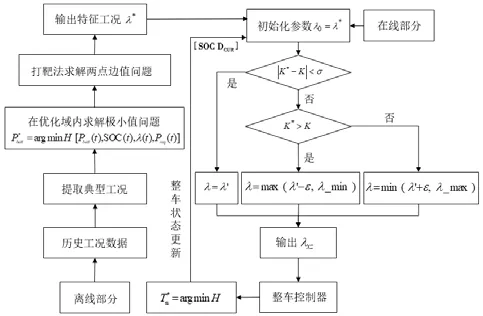
图5 实时优化能量管理策略架构
PMP原理得到最优控制满足的必要条件为:
上述描述的是一个两点边值问题,由于定义的Hamilton函数没有解析表达式,因此该问题只能通过数值方法求解[17],本文采用打靶法得到PMP必要条件的解,具体求解流程如图6所示。
上述求解过程可以通过二分法加快最优值的收敛速度,求解得到的协态变量λ*依赖于完整的工况信息,因此,需要通过寻求离线最优解的变化规律以实时优化能量管理问题。
2.2 离线控制律的在线修正方法
为了研究协态变量在不同行驶条件下的变化规律,采集大量实际公交运行工况数据,对于给定工况采用PMP求解能量优化问题的全局最优解。以其中5组工况为例,行驶里程分别为23.93、20.84、22.93、20.83和24.08 km。利用打靶法求得上述每组工况的协态值,然后在车辆运行的每一时刻求解式(11),得到每组工况在整个优化域SOC随行驶里程的变化规律,如图7所示。由结果可知,在不同行驶里程下,最优解下SOC随行驶里程的变化具有线性趋势。

图6 基于打靶法的两点边值问题求解迭代机制
进一步分析,由于PMP解的最优性对协态值具有很高的敏感性,当改变协态值时,整个工况SOC的变化情况有明显的改变。以重庆道路工况2为例,行驶里程Dtotal为20.84 km,打靶法求得协态值为1.92,当增大λ时工况时域终端的SOC值上升,反之降低,结果如图8所示。故当取协态值为常值时,每个行驶工况下都对应一个最优协态,通过搜索该工况下的最优协态,利用PMP可以获得其离线最优解。
分析上述结果,可以得到在最优协态下SOC和距离变化曲线斜率K存在以下规律:在不同行驶条件下,最优协态下的斜率K近似为常数,且总在行程结束时刻附近SOC达到下限值。
由于通勤式PHEV的行驶路线通常是固定的,且车辆的历史运行数据通过无线通信技术可以储存在RMC中。因此, 从RMC中储存的大量车辆历史速度数据中计算提取该路线下的特征工况,该特征工况数据能够体现通勤车辆的行驶特征,可以用于后续车辆实时运行的能量管理优化,以提升PHEV的燃油经济性。车辆在运行时将车辆的实时状态信号发送给RMC,包括车速、SOC以及位置等状态信息,RMC通过将离线数据计算得到的最优控制律用于实时优化PHEV能量管理策略的参数,从而实现离线控制律和在线实时优化融合的机制。
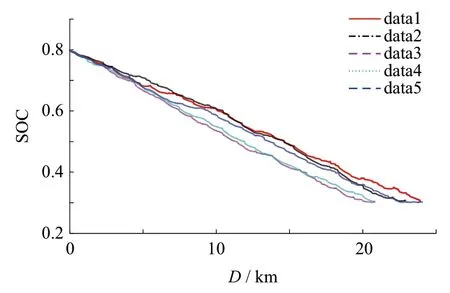
图7 SOC随行驶里程(D)的变化
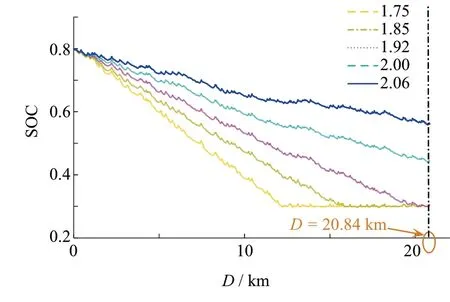
图8 系统协态值对SOC变化的影响
2.3 基于全局最优与实时最优融合的策略设计
对离线采集的大量实际工况数据进行处理,建立完备的数学模型以及合理的汽车运动特征评估体系,构建一条能体现参与数据采集汽车行驶特征的汽车行驶工况曲线。通过搜索最优协态λ*,利用PMP可以获得该特征工况的最优解。基于PMP协态修正的能量管理策略算法和具体流程如图9所示。
全局最优解的实现依赖于工况信息的提前掌握,即最优控制律往往只能在离线状态下得到[18]。由于通勤车辆的运行通常有固定的行驶时间和路线,并且在智能交通系统下,大量的离线实际行驶工况信息可以被采集,整车的运行状态信息可以被实时采集。基于这样的背景和上文得到的离线最优控制律,一种基于在线修正和离线最优融合优化的实时能量管理策略被提出。修正原理如图10所示。
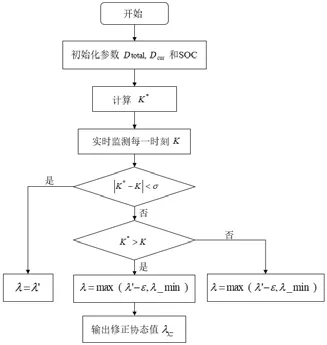
图9 基于实时K追踪的协态修正逻辑框图
1) 现假定在最优协态下,电池SOC和行驶距离按照如下一元一次方程运行:
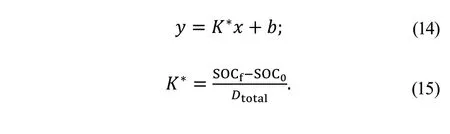
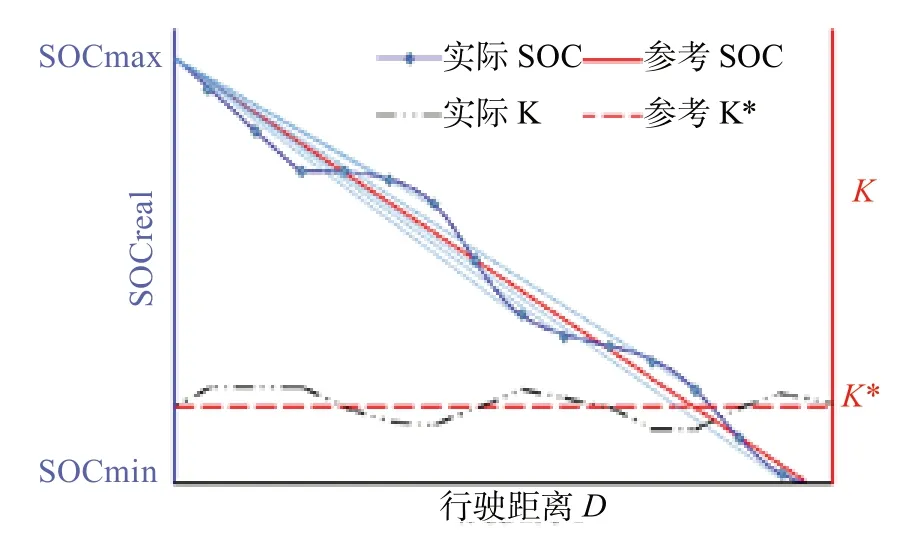
图10 实时SOC距离比值修正原理图
其中:SOC0和SOCf分别为初始时刻SOC和终端SOC;Dtotal代表行驶总里程;x代表运行距离;y代表当前SOC变化量;b为待定系数。
2)通勤车辆行驶时,以提取的特征工况离线求解得到的最优协态作为初始协态值,即λ0=λ*。
3)在智能交通系统下,车辆运行各个时刻的状态和距离被实时监测,因而可以得到

其中Dcur为当前时刻行驶距离。
4)车辆实时运行时,仅管随机行驶条件下的最优协态值无法提前预知,但在最优协态下该未知工况的K*却可以应用于实时控制问题的优化,如图10所示。通过实时检测对比当前时刻K值和K*,当两者偏差在一定限值内时,不作调整动作;大于此限值时,若K的绝对值大于K*,则增大协态值,反之减小,调整的公式表示为

其中,λxz是修正后的协态;λ′是继承上一时刻的协态值;σ是斜率误差限值;ε是协态调整量;λ-min和λ-max分别为协态调整的上下限值;
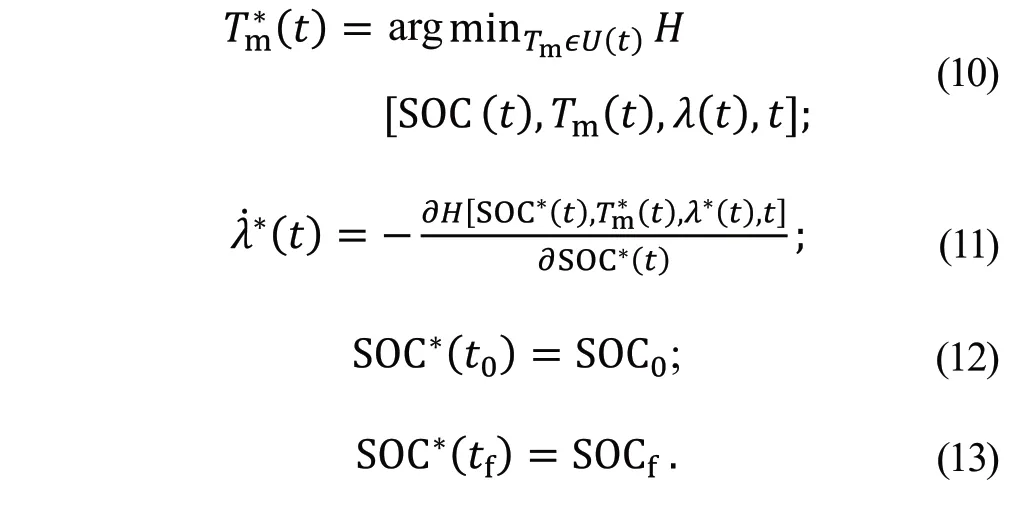
5) 采用修正后的协态值,可以在线获得每个时刻的极值控制量为

在上述定义的算法中,通过将特征工况离线求解的最优协态作为初始值,并且在线动态修正协态变量,进一步整个行程下每一时刻的燃油和电能分配比例被确定,从而实现未知工况下燃油经济性的近似最优解。
3 仿真结果与讨论
为了验证本文提出策略的有效性,在Matlab/Simulink环境下进行仿真分析,对比策略选取 ECMS。同时,为了验证所提策略的适用性,本文采用的工况为特征工况提取所用工况数据之外的随机重庆公交实际工况数据,随机选取2组具有代表性的实际工况,如图11a和图12a所示。
从车速跟踪轨迹结果可知,在2组工况下仿真车速跟踪情况良好,说明了在控制策略下整车的动力性能良好。将提出的策略应用到这2组实际道路工况上,得到SOC轨迹分别如图11b、12b所示。可以看出2条工况通过PMP离线得到最优解,即最优协态作用下,SOC随距离变化曲线斜率K均近似为常数,与上文分析相符。不同的是,随机工况1与特征工况相差较大,因而相应的在特征协态值下运行的SOC轨迹与其最优轨迹相差较大;而随机工况2与特征工况较为相似,因而在特征协态值下运行的SOC轨迹与其最优轨迹相近,但在本文的策略下两组工况运行得到的SOC轨迹都更加接近其分别对应的最优轨迹,因而累积油耗也仅略高于PMP, 如图11c和图12c所示。
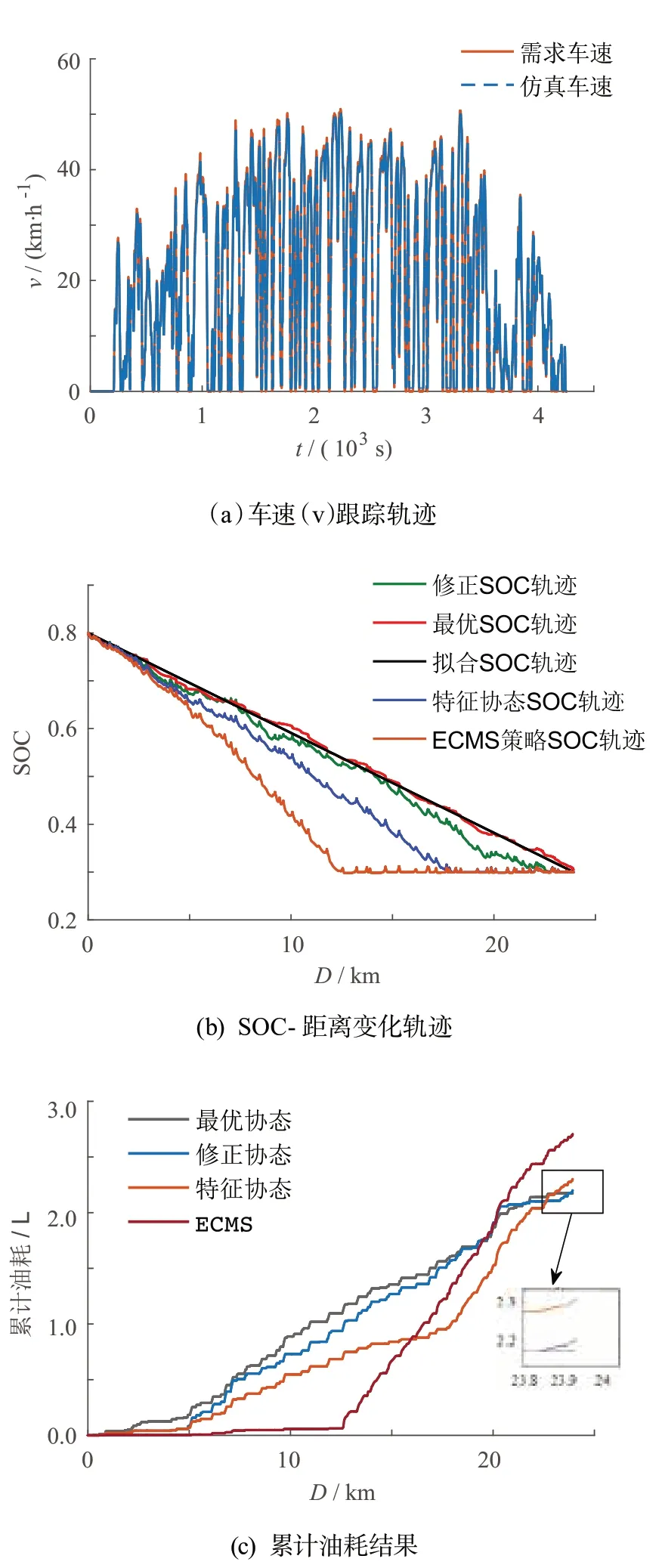
图11 随机道路工况1的仿真结果
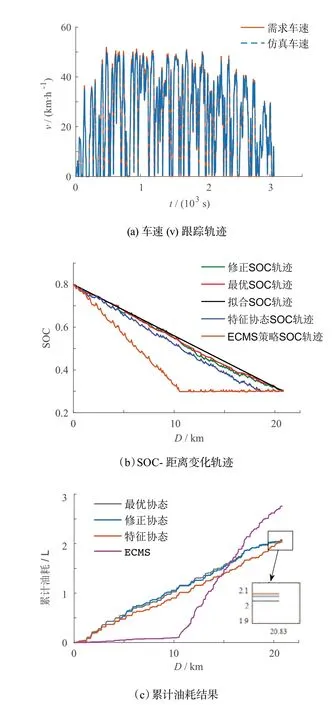
图12 随机道路工况2的仿真结果
在随机道路工况1下进行不同策略的对比,由于ECMS的本质是求等效成本最低,因而在电能充足的时候电能被频繁地使用以节省成本,导致SOC下降到下限值时发动机频繁开启工作。对比所提策略和ECMS发动机和电机工作点和转矩分配情况,结果如图13所示,可以看出,由于所提策略下的SOC距离变化曲线基本在最优轨迹附近,电能在整条线路的使用是均匀分配的,即实现了离线最优控制律的在线应用,因而发动机工作区域明显优于ECMS。
在本文提出的策略下,随机工况1下的协态和SOC随距离变化曲线如图14所示,可以看出,以提取的特征工况最优协态值作为初值协态输入,随着车辆的运行,当实时K值产生偏差时,协态值开始进行修正,且修正值和SOC变化趋势与上文分析一致。
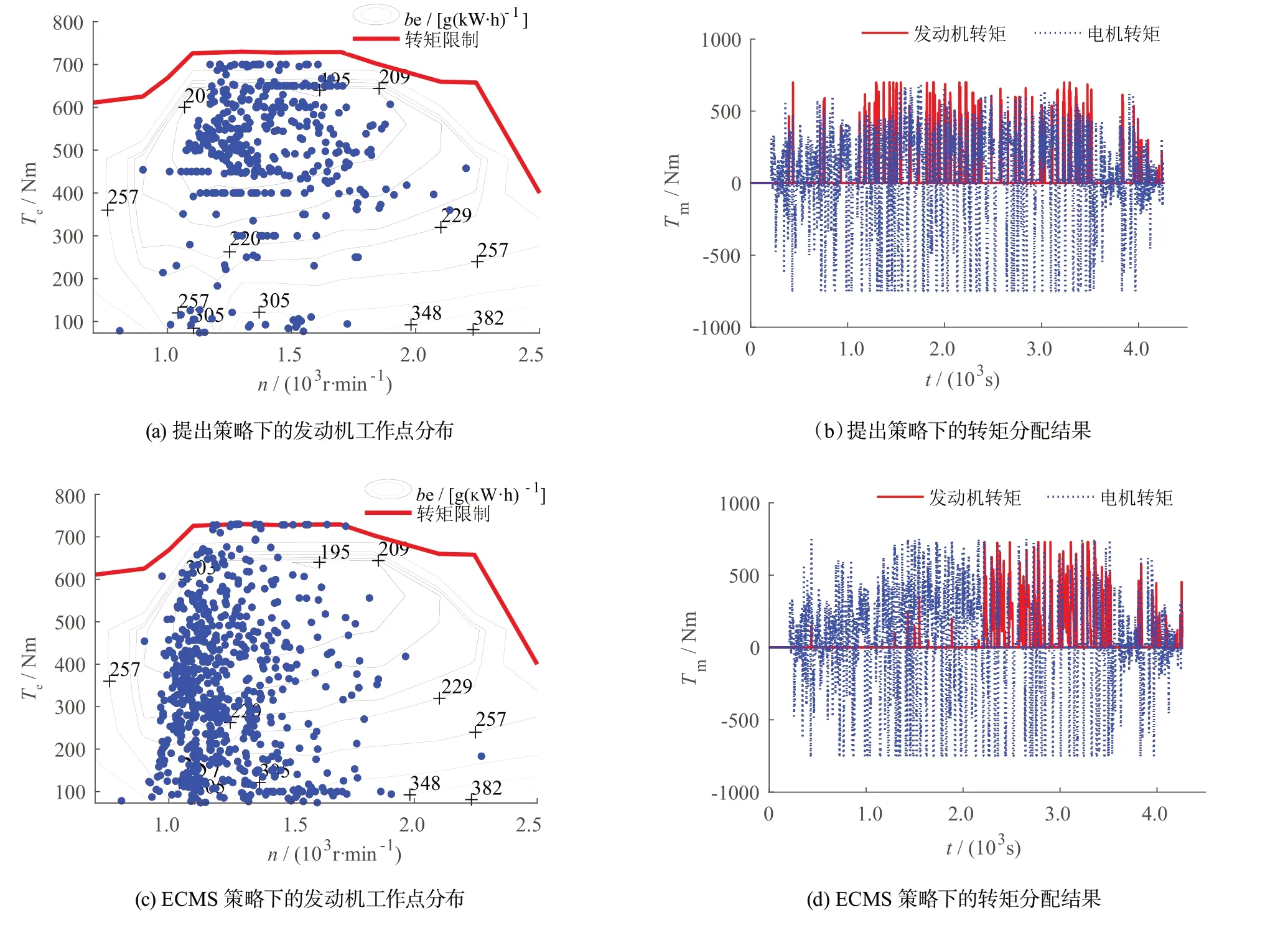
图13 不同策略下的发动机工作点分布情况和转矩分配情况
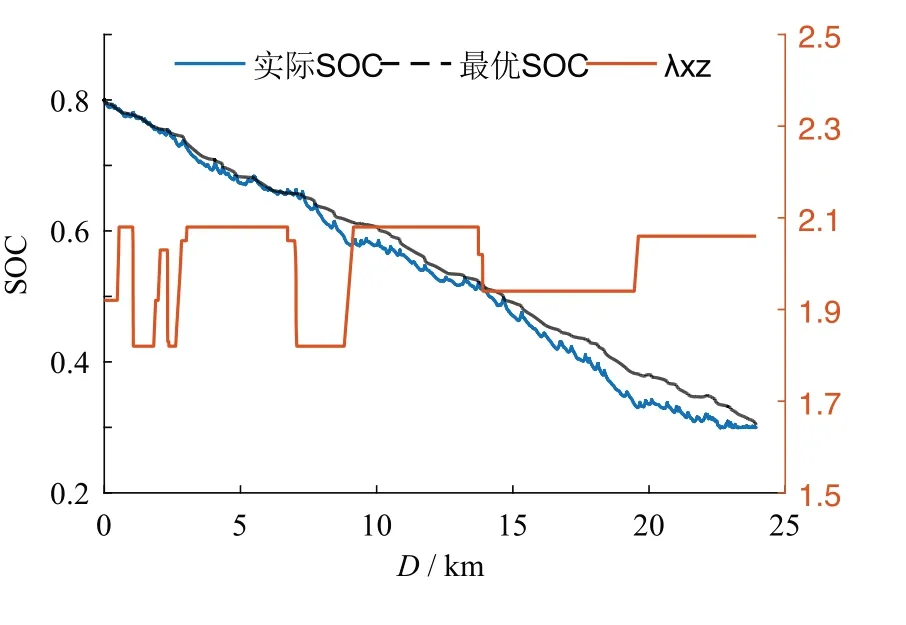
图14 协态和SOC修正结果
不同策略下的能耗对比结果如表2所示。表中分别对比了在ECMS、所提方法以及PMP策略下工况1的能耗情况。可以看出:所提策略相较于ECMS能耗下降18.6%;而相较于该随机工况PMP的最优解,所提出的策略能耗仅增加1.3%;且当特征工况不适用时,所提出的策略依然可以通过修正接近该运行工况的最优解。这充分验证了本文提出策略的有效性。
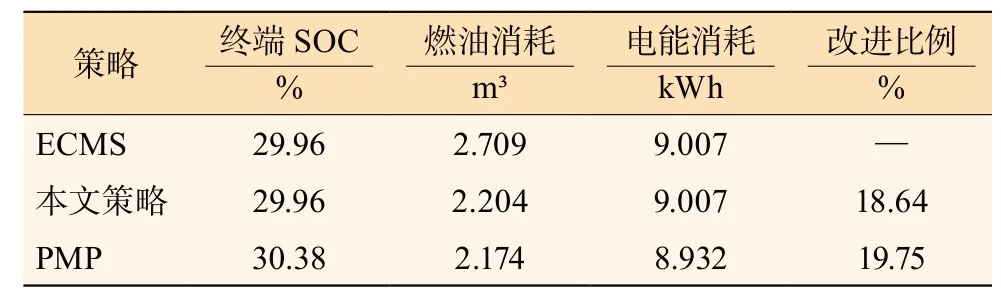
表2 不同控制策略下能耗对比结果
4 结 论
本文提出一种智能网联环境下的PHEV能量实时优化控制策略,主要由离线和在线2部分组成。离线部分针对通勤车辆实际历史运行数据中提取得到的特征工况,采用PMP离线求解该工况的燃油经济性全局最优解,并通过打靶法获取该工况的最优协态值;在线部分结合离线求解的特征工况协态最优解,进一步提出基于全局最优和瞬时最优融合的控制策略, 通过实时修正协态变量,实现未知工况下燃油经济性的近似最优解。
结果显示:本文提出的策略能够在随机工况下实现接近于PMP方法的理论最优性能,燃油经济性较PMP仅下降1.3%,且相较实时优化方法ECMS,燃油经济性能够提升18.6%,实现了离线控制律的在线应用。后续研究工作可以在此基础上考虑发动机等部件的实际工作特性,以进一步提升PHEV节油潜力。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
电脑知识与技术(2022年15期)2022-07-02
大众投资指南(2021年23期)2021-12-06
防爆电机(2021年4期)2021-07-28
建材发展导向(2021年12期)2021-07-22
北京航空航天大学学报(2021年6期)2021-07-20
建材发展导向(2021年9期)2021-07-16
电脑爱好者(2020年23期)2020-12-30
电脑知识与技术(2020年15期)2020-07-04
财会学习(2018年2期)2018-01-24