一类密度依赖的生物入侵模型的周期行波解
2021-06-26 02:47:58刘园园王勤龙黄文韬
安徽师范大学学报(自然科学版) 2021年3期
刘园园,王勤龙,黄文韬
(1.广东科技学院 基础部,广东 东莞 523668;2.桂林电子科技大学 数学与计算科学学院,广西 桂林 541004;3.广西师范大学 数学与统计学院,广西 桂林 541004)
1 引言及主要结果
近年来,种群动力学一直是人们关注的焦点。非线性演化方程解的研究对于解释生物动力学特别是对于解释生物入侵过程中的种群动态行为非常重要。例如,生物入侵往往会导致原生群落发生剧烈变化,导致生物多样性丧失[1-5]。文[6]引入一类密度依赖和具Allee效应种群动态的单种群入侵模型如下:
通过适当的变量替换得到它的一些精确解,这对于描述移动种群的传播是一个非常有价值的结果。文[7]中,作者用定性理论的方法得到了方程(E)的一个孤立周期行波解,它对应着生物入侵过程中一类特殊的传播模式。根据文献[8],我们可以选择三次多项式来描述此入侵种群的内部反应与增长情况,在上述方程(E)的基础上得到密度依赖迁移和Allee效应的单种群修订模型如下,

(1)

ut+(a0+a1u)ux=uxx-β1b2u+(β1b2-β1b1+b2)u2+(b1-b2+β1b1)u3-b1u4
(2)

本文通过行波变换将方程(2)转化为行波方程,通过计算其一个正平衡点的前几个焦点量来研究其Hopf分支与相应的行波解问题。近年来,对种群反应扩散模型周期行波解的研究非常广泛,例如,文[9]中,作者研究了一类捕食者-被捕食者模型,得到了在正平衡点处某一领域内可Hopf分支出一个小振幅周期解的结论;文[10]中,作者应用Hopf分支理论研究了一类生物入侵模型,得到该模型由Hopf分支出一个周期解的结论;文[11-12]的作者应用数值方法研究一类反应扩散模型的Hopf分支得到一个周期解的结论;文[7]中的作者应用微分方程定性理论方法研究一类反应扩散模型在正平衡点处可由Hopf分支出一个周期行波解的结果。本文应用定性理论的奇点量方法研究模型(2)的多重Hopf分支问题,我们在细焦点邻域得到两个孤立闭轨道或极限环,对应于方程(2)的两个特殊周期行波解。
2 行波系统的Hopf分支
假定方程(2)有如下形式行波解(具体可参见文献[13]):
u(x,t)=u(ξ),ξ=x-ct
(3)


(4)
称系统(4)为(2)的行波系统。下面我们应用的奇点量方法(具体参见文献[14-16])研究系统(4)的Hopf分支。
接下来我们简要介绍奇点量方法并计算系统(1)的奇点量,首先考虑实系统
(5)
其中Xk(x,y),Yk(x,y)是关于x,y的k次齐次多项式。通过以下变换

(6)
可将系统(2)化为复系统
(7)
其中z、w、T为复变量,并且
称系统(2)与(4)互为伴随系统。
引理1[17,18]对系统(4)可逐项确定形式级数
(8)

(9)
其中C∞=1,μm是系统(4)在原点的第m个奇点量。对任意的α、β,当α=β时,Cαβ由递推公式

(10)
当α<0、β<0或α=β>0,置Cαβ=0。对任意的正整数m,有

(11)
定义1设系统(4)在原点处的第m个奇点量为μm,若μ1=μ2=…=μm-1=0,且μm≠0称原点为m阶细奇点。
由文献[14]可知,系统(4)的首个非零的焦点量v2m+1(2π)与其伴随复系统的首个非奇点量μm满足v2m+1(2π)=iπμm,因此,焦点量和奇点量是等价的,可将系统的焦点量的计算转化为系统奇点量的计算。
引理2[19]对于系统(4),其伴随复系统原点的奇点量μi(i=1,2,…,k)有m个独立参数θ=(θ1,θ2,…,θm),若θ=θ0时,该复系统原点为m阶细奇点(相应地系统(4)平衡点(1,0)为m阶细焦点)且雅克比行列式满足
则系统(4)在平衡点(1,0)的充分小邻域内可扰动出m个小振幅极限环。
令β1=1+ρ2(ρ≠0),通过

(12)
我们可以得到系统(4)的伴随复系统如下:
(13)
并且系统(4)的平衡点(1,0)对应于系统(13)的原点。通过数学软件Mathematica进行计算可得:
定理2.1系统(13)在原点处的前2个奇点量μm的表达式为:
情形1:若a1=0,则μ2=0。

在计算μ2的过程中,已置μ1=0。
由定理2.1显然有:
定理2.2系统(13)原点前2个奇点量为零当且仅当下面的条件之一成立
(i)a1=0;
(ii)a1≠0,b2=1,ρ=±1;
定理2.3系统(13)原点的所有奇点量为零当且仅当定理2.2中两组条件之一成立,即这两个条件为系统(13)原点的中心条件。
证明当a1=0时,系统(4)可化简为

(14)
当a1≠0,b2=1,ρ=±1时,系统(4)可化简为
(15)
同理可知系统(15)关于y轴对称,即证系统(13)原点是中心。
定理2.4系统(13)原点成为2阶细奇点当且仅当下列条件成立

(16)
相应地,系统(4)平衡点(1,0)成为二阶细焦点的充要条件是式(16)成立。
通过行列式方法计算有
因此我们可以得到
定理2.5当系统(4)的平衡点(1,0)为2阶细焦点时,对系统(4)的系数进行适当扰动,该系统在平衡点(1,0)处最多可分支出两个极限环。
3 数值模拟分析
下面我们应用Mathmatica软件进行数值模拟,为验证本文所得理论结果,根据定理2.4和定理2.5,我们取方程的初始条件为:a0=5.2,a1=-5,β1=1.508,c=0.2001,b2=0.97,b1=0.03。通过数值计算,可得系统(4)在平衡点(1,0)处分支出两个极限环,见图1。
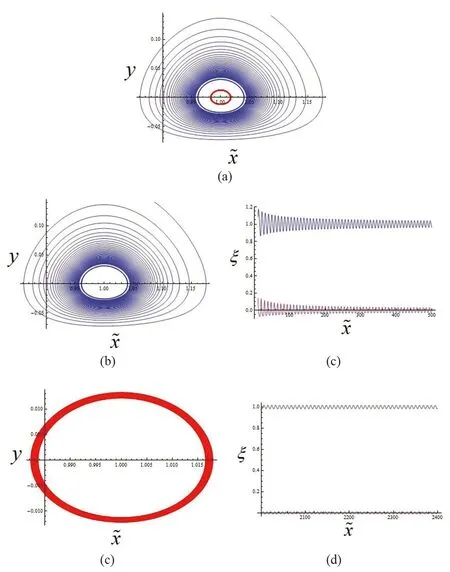
图1 系统(4)的相平面图Fig.1 The phase plan of system(4)
综上分析可知,数值模拟的结果与理论分析结果吻合较好。事实上,当系统(4)的系数满足a0+a1-c>0并且ν3(2π)=0,ν5(2π)≠0,根据Hopf分支定理和定理3.3,我们可以得到系统(4)在平衡点(1,0)附近有两个小振幅极限环。
4 结论

猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:57:42
小学生学习指导(爆笑校园)(2021年10期)2021-11-01 08:43:58
小学生学习指导(爆笑校园)(2021年9期)2021-09-27 03:45:38
小学生学习指导(爆笑校园)(2021年4期)2021-04-29 09:34:02
军事文摘(2020年14期)2020-12-17 06:27:46
烟台果树(2019年1期)2019-01-28 09:34:58
传媒评论(2018年7期)2018-09-18 03:45:52
成都信息工程大学学报(2018年1期)2018-05-31 08:40:38
IT时代周刊(2015年7期)2015-11-11 05:49:56
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50