基于视频图像检测器的动态绿波预警设计
2021-06-22 02:13巩舜妹邵志坤段莉敏王厚沂
河北北方学院学报(自然科学版) 2021年5期
巩舜妹,邵志坤,巩 伟,段莉敏,王厚沂
(宿州学院 资源与土木工程学院,安徽 宿州 234000)
0 引 言
城市路段交通信号绿波控制作为一种新型的交通流运行状态控制方法,把信息处理技术与传感器技术广泛运用到了交叉口与路段的信号控制设计之中。为了使信号配时的效果达到最优化,前人对此做了大量的研究。外国学者D.C.Little提出的混合整数线性规划实现了交通信号的同步技术[1],与C.P.Pappis等提出的一种模糊逻辑控制器[2]原理类似。国内学者卢顺达等基于非对称相位相序的原理,提出了双向绿波协调控制图解法的优化方法[3];沈国江与孙优贤针对城市交通干线的交通特性,进行了递阶模糊控制和神经网络算法的再次实现[4];常玉林等则针对城市交通干线做出了一种双向绿波控制的优化设计[5];李元对城市交通干线进行了信号协调的控制方法及其优化方式的研究[6];夏井新等提出了一种基于速度波动区间的双向绿波控制方法[7];舒毅等则基于路边灯光诱导提出了一种绿波设计[8]。前人从上述角度优化了绿波控制的效果,增大了绿波带宽,提高了车辆在交叉口的畅行效果。但研究的前提是基于固定的绿波速度,使绿波控制方案存在一定的限制性。基于上述情况,王厚沂与巩舜妹提出了基于红外传感器感应下的动态绿波预警设计[9],但是红外传感器的受制性较强,且优化算法局限性较高。基于此,本文以一种基于视频图像检测器的全新绿波带设计来代替原有的固定绿波速度,配合地埋式的交通检测器辅助绿波带设计,以达到可调速,响应性强的动态绿波控制效果。
1 绿波带的原理及现状问题分析
现行的绿波带设计的原理是:在机动车进入绿波带控制的城市干线时,通过路旁或架设在正对道路中央上空的信号显示板,驾驶员会被告知已经驶入城市绿波带路段,并要求以某一固定的绿波速度行驶。交通信息中心通过埋设在地下的环形线圈感应器来感应车流,并根据绿波速度来调整机动车到达下一个交叉路口时的信号灯状态,使其刚好处于绿灯时段。
而机动车是以固定的绿波速度行驶,使车辆在路段上的灵活性大大降低,并由于某些紧急情况,车辆未能以规定速度行驶,导致信号灯控制的准确性未能达到设计的理想效果。使用地埋式的环形线圈检测器来感应车流会产生一些弊端,而环形线圈检测器对路面上的车辆压力和温度变化比较敏感,当车辆类型变化较大时,检测的精准性也会大幅下降,并且由于环形线圈检测器自身设备的安装特性,要求安装时必须刨开原有路面,使路面严重损害的同时,对正常行使的交通流造成较为严重的干扰。
2 视频图像检测器分析及其工作原理
2.1 视频图像检测器工作原理
视频图像检测器是利用半导体电荷耦合器CCD摄像机进行工作。其主要的工作过程包括:电信号的产生、存储、传输及检测。摄像机通过CCD或电子束的自动扫描,把以空间位置划分的图像分解成相应像素的时间信号,在极端微小的时间间隔内,连续对监录过程中产生的两幅照片进行对比,通过对两幅照片的细微之处与整体布局进行比较,若两幅图之间的差异超过规定的阈值范围,则说明有运动车辆并记录下来。同时,视频图像检测器可获得车辆的外形、长宽、轴数等交通参数,由此判断车流的车辆组成,并向中心系统输入一个速度以调整参数。
2.2 视频图像检测器组成
视频图像检测器由两大部分组成,一是路段视频监控执行部分,二是中央计算处理部分。其中路段视频监控执行部分主要是由一个CCD摄像机与路段基础设施组成;中央计算处理部分主要包括数字化器、格式化器、微处理器、接口、键盘、电源等组成(图1)。

图1 视频图像检测器的组成
3 系统设计
3.1 系统设计原理
提出将受控路段进行分区,对相邻交叉口间的路段划分为适当长度的受控区域,分别在每一特定分割点处架设视频图像检测器,以感应机动车车流的运行速度,并将各速度数据传输入中央控制电脑进行计算,根据计算后的数据对即将通过的路口信号灯进行控制,并通过多种信息传输技术,对行驶中驾驶员进行速度引导与绿灯时间预报,从而使车流以顺畅平滑的运行状态通过路口,实现动态绿波的效果。系统框架如图2所示。

图2 系统框架示意
3.2 视频图像检测器架设方案及工作流程
3.2.1 检测器架设方案
现有车流进入动态绿波控制路段,从上游交叉路口i顺流下行到下一路口j,根据视频图像检测器的监录范围将2个路口之间的路段分成有限段,并在每一分段的终点架设一台视频图像检测器。假设将相邻交叉口路段平分成n小段,即需要n台视频图像检测器来达到监录效果。以单侧道路进行分析。检测器架设如图3所示。

图3 视频图像检测器架设分布
3.2.2 检测器工作流程
现有车流以不同的速度驶入动态绿波控制区域(机动车均按交通法规行驶,不存在以超过城市路段限制速度行驶的情况),检测器分别在车辆进入监录分段时与到达监录分段中点时对车辆进行拍照,记下相应时刻并录入计算机。根据设计分成n段,路段上行驶的每辆车需进行2n+1次拍摄计时。
通过速度计算与离散分析可以得到车流的运动趋势,根据得到的运动趋势可以计算出车流在距下一路口临近分段点到交叉口所需的运行时间,并由此调整信号配时。
3.3 信号的接收、发送及处理
信号接收、发送及处理主要由视频图像检测单元、远程信息接发单元与中央计算机数据处理单元3个部分组成。信号的接收、发送及处理模块如图4所示。
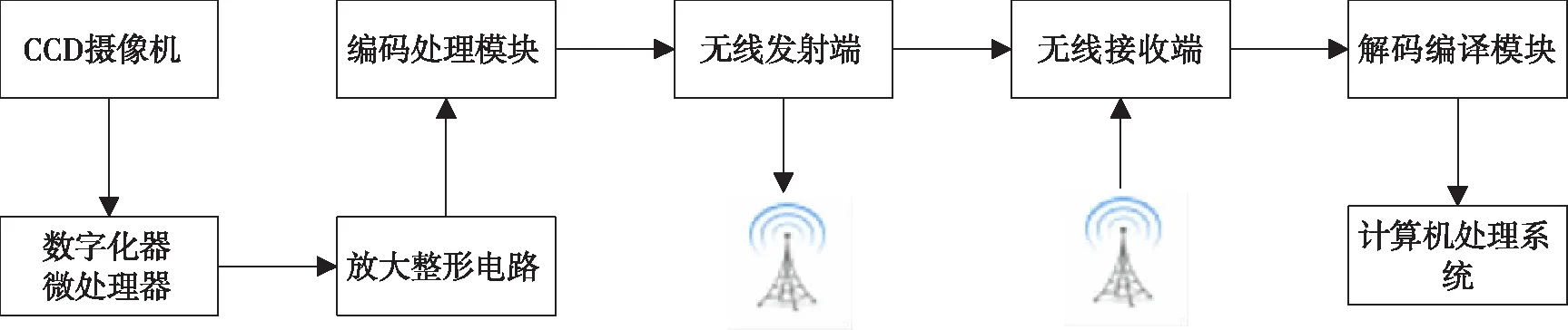
图4 信号的接收、发送及处理模块
视频图像检测器中的CCD摄像机架设在正对道路中央的上空5~6 m处,当道路上没有车辆运动时,即CCD摄像机PC端屏幕图像对比差在控制阈值范围内时,单位分割单元的视频检测器保持静默状态;当有车辆行驶时,图像对比差值超过控制阈值,检测器会自动开始记录道路上的车辆运行,通过数字化器与微处理器的编译会产生相应车辆的速度信息,以电信号的形式进入电路,并进行整形放大和编码处理,再由远程信号发射模块将信号发射出去,由中央处理中心进行接收和编译,并向电脑导入一个数值,随后进行速度趋势与路口信号配时方案的计算。
3.4 诱导、预警装置设计
模块利用了实时数据处理技术与交通信息发布技术,是整个系统循环工作的最后一环也是最重要的一环。系统装置主要由可变信息标志构成,其中LED信号灯牌作为信息提供单元被安置在路段划分的第n段的起点处。系统装置将由计算处理得到的机动车在该特定位置到即将到达的路口所需的时间在LED屏幕上显示出来,并告知正在运行的车辆驾驶员即将到达的路口绿灯预报时间,并提醒驾驶员保持车速,提高注意力,从而形成一个预警与诱导的机制。在一波车流通过路口后,绿灯时间结束,并根据路口相接支路的交通量,信号灯显示黄灯或红灯。
另外,在临近路口时,大多驾驶员可能因为赶绿灯时间而产生心理上的波动,导致行车速度会骤升或骤降,严重影响车流整体的稳定性,从而降低了交叉路口处的顺畅性。而该预警装置可从驾驶员的心理因素上解决这一问题,由于信号灯牌上所显示的绿灯预报时间其实是标志了驾驶员在该接收信息点到路口的可靠预计时间,这一时间是通过计算机在前几个过程中,根据大量的车辆运行速度计算所得到的速度趋势,所以驾驶员接收到该预告时间时,可以根据自身驾驶特性与车辆运行情况在微小的范围内调整行车速度,以最为契合的时刻到达路口,进入绿灯时间,并顺利通过交叉口。这个过程并不会因赶绿灯或等待绿灯而大幅度调整车速而造成车流运行的波动,保证了驾驶员的心理稳定性,提高了路段与交叉口的顺畅性和通行效率,达到一路绿波的动态效果。灯牌设计如图5所示。
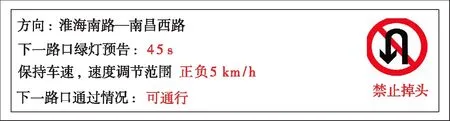
图5 灯牌设计
4 数学模型分析与设计
4.1 车辆运行速度趋势计算模型
车流在路段上会因不同的交通状况而导致车辆速度产生大范围性的波动。以30 min为例,城市路段典型的速度时间变化如图6所示。
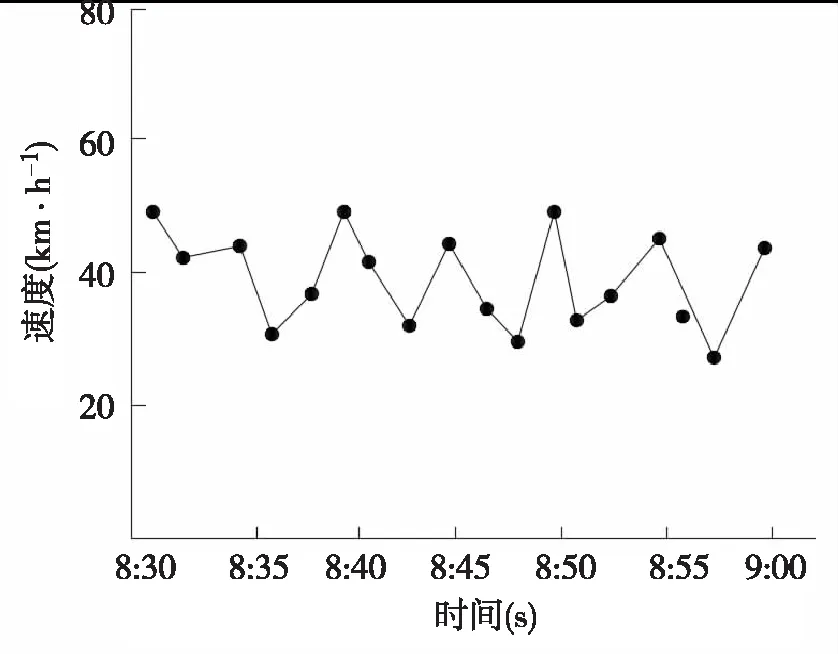
图6 速度随时间变化
由图6可知,在一定的时间区间内,车流速度呈上下波动的趋势,幅度大小不一。故本文引入“运动趋势”作为绿波的设计参数,即通过计算不同区段内加速度,并在一定的置信水平内对加速度进行调整,以得到下一测试区段内车流的运动趋势与行驶耗时。计算模型如公式(1)所示,式中设车流在一定长度的道路区段内作匀变速运动,划分的每段道路长度均为l。
(1)
式(1)中:v1、v2、vn分别表示的是路段S1、S2、Sn的平均速度或路段中点的瞬时速度;
tnm代表机动车在第nm段所用时间;
a(n-1)n表示路段Sn-1中点到路段Sn中点内车流的加速度。
由于一波车流内总会出现明显偏离车流总体测量值的个别车辆的车速,因此引入离散回归曲线对每个车辆的分路段加速度a进行统计修正,计算结果作为车流的分路段加速度。
(2)
x代表该股车流中的车辆数;
b,c代表修正系数。
由CCD摄像机检测出车流的车辆数,利用式(1)计算出每辆车的路段加速度,结合式(2)所得的修正系数对车流平均加速度进行修正,可得a′,并令其为最后一段路段内车流的运动趋势。
4.2 绿灯预告报时计算模型
本文提出在划分第n段路段中点架设LED诱导灯牌进行绿灯预告报时,报告时间如式(3)所示:
(3)
式(3)中:T为绿灯预告报时;
v′为第n段起点处车流的瞬时速度。
4.3 绿波带宽计算模型
由本文提出的方法进行绿波带设计,可以使绿波带宽最大化近似于车流在2个交叉口间的行驶时间,即式(4)式所示:
Tw≈t11+t12+t21+t22+…+tn1+tn2
(4)
4.4 优化效果调整算法
优化步骤是在试运营期间进行的,目的是为了根据实测效果来不断调整系数,以使得优化效果达到最优。爬山法优化流程如图7所示。
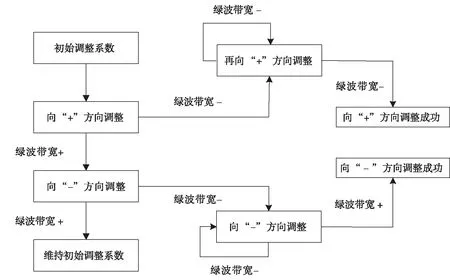
图7 优化调整爬山算法
5 实地设计及性能评估
5.1 干线选择
为了验证视频图像检测与信号灯诱导装置在干线绿波带设计中应用的效果,特取安徽省宿州市迎宾大道(磬云南路—淮海南路)工作日的数据进行干线绿波信号配时的仿真设计。迎宾大道作为典型的城市主干道,西接京台高速,东连宿怀路,既是宿州对外交通的主要通道之一,又是贯穿宿州市区东西的主要动脉。所选道路现为双向六车道,道路全长3.5 km,双向车流分布较为均匀。所选路线共涵盖4个交叉口,现将其分别命名为1001、1002、1003、1004。
5.2 评估对象选择
在对绿波的控制方法进行评估时,国内研究人员偏重考虑延误、排队长度、停车次数等指标,而国外研究人员则侧重行程时间、最大排队长度、延误等指标。综合国内外研究,此处选择绿波带宽、排队延误与停车次数3个指标对本文提出的设计方法进行检验。
5.2.1 绿波带宽
实践表明,绿波带宽是检验干线信号控制的决定性指标,绿波带宽越大越能保证车流顺利的通行。本文提出的设计方案达到了绿灯时间动态控制的效果,能够最大程度地拓宽绿波带宽。表1数据对比了利用本文方法与采用传统方法设计的干线双向绿波带宽值,可明显地展现出本文所设计方案在绝大多数的时间段与方向上拥有更加优良的绿波带宽值。

表1 迎宾大道干线双向绿波控制带宽值 s
5.2.2 交叉口延误
交通延误是评测信号控制优化方法的重要依据。交通延误指的是由于交通摩阻与交通管制引起的行驶时间之差。本文采用美国公路通行能力手册中以车流通过所检验交叉路口的平均延误作为分析目标,即车流因驾驶员自身原因而以较低速度行驶产生的延误与车流在交叉口停车或在交叉口上游减速行进产生的延误总和。
为了更好地对比优化设计的绿波控制效果,提出了利用3种不同配时方案对干线绿波相位的平均延误进行比较的方法,本文利用这种对比方法对所检验路段的平均延误进行了评估比较。表2给出了评估时段3种方案干线绿波相位的平均延误及对比。表2中,方案一是不进行绿波设计下的固有相位配时方案,方案二是传统型绿波控制方案,方案三是本文提出的新型绿波控制方案。

表2 3种方案的交通延误对比 s
由表2可看出采用本文提出的方案,优化后绿波相位的交通延误相对最小,其优化效果达到最佳状态。从表中数据可计算得出方案三相对方案一在评估时段的平均延误减少了36.7%,比方案二在评估时段的平均延误减少了20.9%。
5.2.3 交叉口停车次数
在现在城市交通控制系统中,停车次数是检验车流通过交叉口畅行程度的一个重要表征。本文采用浮动车法对迎宾大道进行跟踪调查,以运行时间与停车次数作为评价指标。对比结果见表3。

表3 迎宾大道优化前后效果指标对比
优化设计前后的对比表明,实施本文设计方案后,迎宾大道自东向西方向的车流总运行时间从380 s降至338 s,减少了21.1%;总停车次数从3.92次,降低到0.45次。自西向东方向的流运行时间从396 s降至341 s,减少了23.9%;总停车次数从3.7次降到0.23次。
6 结 论
基于视频图像检测器下的动态绿波预警设计综合运用了先进的交通信息采集技术、先进的交通通信技术、智能交通管理技术、人工智能算法、及Vissim仿真技术等,有效地解决了传统干线绿波设计的固定绿波速度、维护困难、系统建设费用昂贵等一系列问题。本文提出结合视频图像检测器与可变信号标志相结合的控制方法,得到以下3点结论。
1)使用非地埋式的车辆检测器,安装方便,易于维修。
2)通过系统设计,得出一个结合车流总体车速所得的绿灯预告报时,并由可变信号标志将信息传递给驾驶员,符合驾驶员的心理特性,并可达到可动态、可预警的预期目标效果。
3)经过测试评估,采用该设计方案相对于传统设计方案,造价与维修费用降低,绿波带宽明显加大,交叉口运行延误下降了20.9%,运行时间降低了22.5%,总停车次数减少了3.47次。
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
铁道运输与经济(2020年7期)2020-07-30
东坡赤壁诗词(2019年5期)2019-11-14
东坡赤壁诗词(2019年3期)2019-07-05
扬子江(2019年3期)2019-05-24
辽河(2019年2期)2019-03-22
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
数学教学通讯·初中版(2015年5期)2015-06-17
中国火炬(2010年5期)2010-07-25
中学生百科·小文艺(2009年8期)2009-11-24