空间圆柱形物体变形的检测方法
2021-06-22 02:13杨丽
河北北方学院学报(自然科学版) 2021年5期
杨 丽
(上海市城市建设工程学校(上海市园林学校),上海 200232)
对于空间圆柱形物体,在实际和设计时会存在差异,或者是在长期使用后会发生形变而影响其使用情况。因此必须对空间圆柱体进行检测,判断其是否满足工程要求[1]。
1 观测及算法原理
1.1 数据采集
本文中的观测目标为空间圆柱形,所以整个物体的观测数据必然不能在一个测站上全部测得。因此,首先需在物体周围选择2个合适的地点作为测站,这样就形成了2个自定义的坐标系,接下来还必须选定4个公共点,便于后期数据的整体处理。
1.2 数据拼接算法原理
不同测站观测的坐标属于不同的坐标系。但如果在不同的测站观测一些公共点就可以将这些点的坐标归算到1个坐标系(图1)。

图1 不同测站的2个坐标系

公共点之间的关系表示为
(1)
式中的(x0,y0,h0)为平移量,R1(α)、R2(β)、R3(γ)为旋转矩阵

当公共点个数n大于3时,可以按最小二乘求定以上6个参数。对每个公共点,列出误差方程为
(2)
式中的V=(VxVyVh)T为转换残差(改正数)。
(3)
(3)式中偏导数和常数项

根据上述过程,利用各个测站观测的公共点,可以将所有观测值统一到1个坐标系中,相当于在1个测站观测到了整个物体的表面。
1.3 模型拟合算法原理
如图2所示,圆柱的半径为R,过观测点Pi作与圆柱面轴线垂直的平面,其与圆柱轴线的交点为P,直线PiP与圆柱面的交点为P′。显然可以用偏离距离PiP′作为残差,列误差方程[1]。

图2 圆柱体的拟合模型
设中心轴线方程为
(4)
式中(a,b,c)T的为空间直线的单位方向矢量,(x0,y0,h0)T为中心轴线与xoy平面的交点,t为直线上任意点至(x0,y0,h0)T的距离。为了唯一表示直线,定义a>0。若a=0,则b>0;若a=0且b=0,则c>0(a、b、c不可能同时为0)。
过观测点Pi(xi,yi,hi)与中心轴线垂直的平面方程[2-3]
ax+by+ch+Di=0
(5)
其中Di=-(axi+byi+chi)
将轴线方程代入平面,求得
t=-(ax0+by0+ch0+Di)=a(xi-x0)+b(yi-y0)+c(hi-h0)
(6)
中心轴线与该垂直面的交点坐标
(7)
各点的误差方程为
(8)
将误差方程线性化为

(9)
其中
写成矩阵形式
Vi=Aiδx-Li
(10)
其中δx=[δa,δb,δc,δx0,δy0,δh0,δR]T。此时a,b,c需满足条件a2+b2+c2=1,即
aδa+bδb+cδc=0
(11)
按附有条件的平差方法平差,但显然条件方程式不能使得(abc)T满足和a>0的要求[4-5]。平差迭代步骤为
(2)按照误差方程式(10)和条件方程式(11)得到法方程为
(12)
求解得到参数的第一次改正数δx(1),未知数修正为a(1),b(1),c(1),x0(1),y0(1),h0(1),R(1)。
(3)若第k次迭代求得未知数为a(k),b(k),c(k),x0(k),y0(k),h0(k),R(k),将(a(k),b(k),c(k))T单位化
2 算例分析
本例中数据来源于某建筑物前的柱子(图3)。

图3 某建筑物前的圆柱体
设置了2个测站,测站1和测站2,设置测站1和测站2时分别用全站仪测量A、B、C、D 4个公共点,以供坐标转换时用。
其中测站与公共点的布设关系如图4所示。

图4 测站与公共点的布设关系
表1为观测圆柱体时坐标转换的公共点数据。

表1 公共点数据 m
表2为测站1坐标转换到测站2坐标系。

表2 测站1坐标转换到测站2坐标系 m
转换后的数据如图5所示。
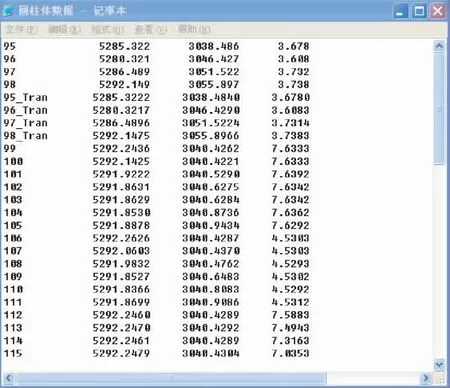
图5 坐标转换后的数据
坐标转换后,进行数据拟合。读入数据对其进行拟合,得出中心线方程即圆柱体的拟合结果,如图6所示。

图6 拟合结果
至此,拟合结束。点“残差”按钮,显示拟合的残差,残差见表3。
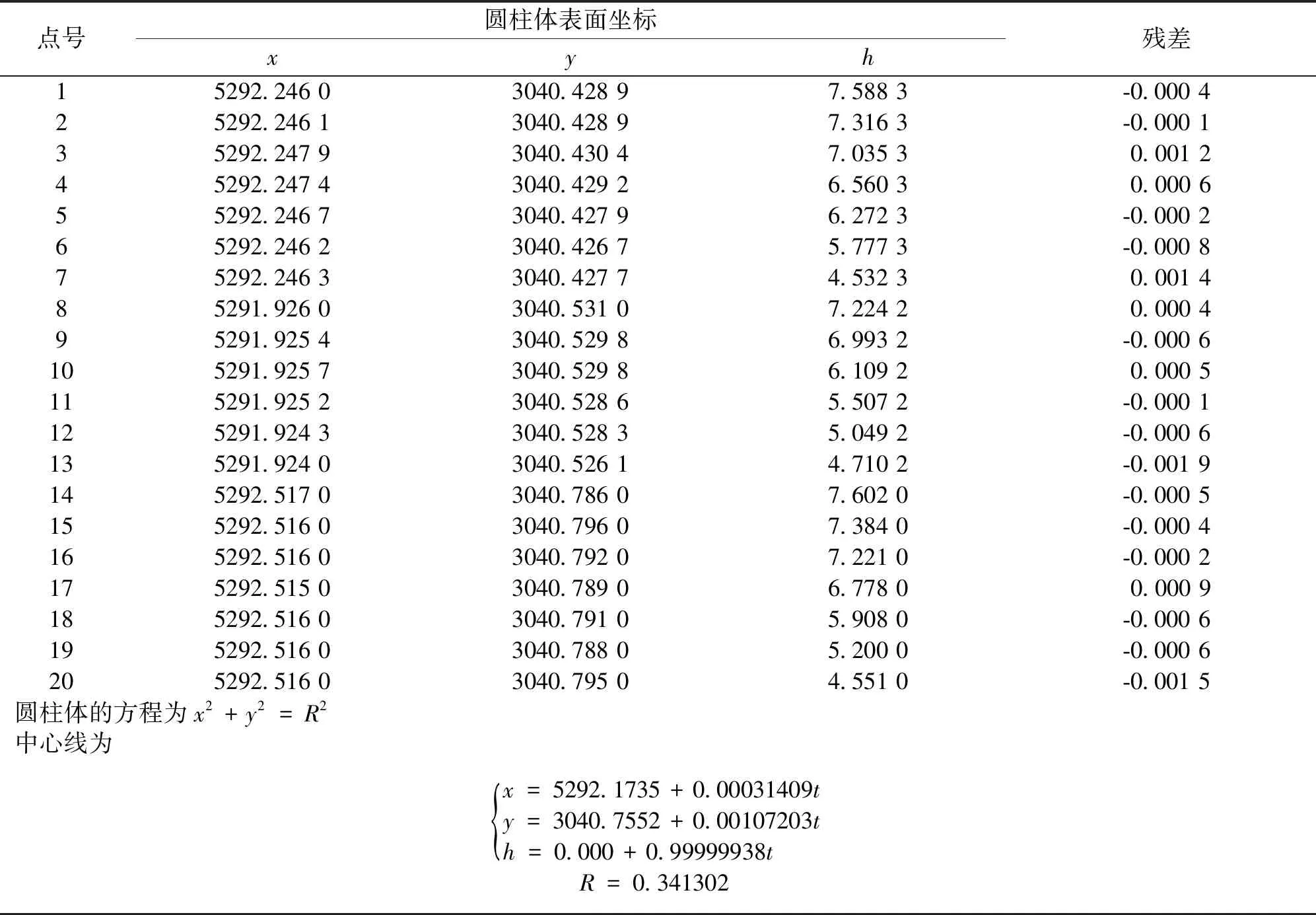
表3 拟合圆柱面坐标与残差 m
程序可以连接AtuoCAD,根据圆心坐标和半径可以画出圆柱体立体图,并通过语句“shademode”+“_3D wireframe”实现着色,效果如图7所示。

图7 拟合的圆柱体图形显示
3 结 论
本文介绍了空间圆柱体的检测方法,利用全站仪观测物体表面点的空间坐标,拟合出圆柱体的方程,将拟合出的中心线方程、半径与设计时对比,即可得出圆柱体的整体变形情况,根据每个观测点的残差情况,即可看出每点的变形情况。从拟合的结果来看,此物体整体情况良好,没有变形特别明显的点位。
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
测绘地理信息(2022年2期)2022-04-02
振动与冲击(2022年1期)2022-01-27
北京测绘(2021年7期)2021-07-28
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
小学生学习指导(高年级)(2019年6期)2019-06-01
娃娃画报(2016年6期)2016-07-29