
新工科背景下基于机器人竞赛的创新人才培养模式
2021-06-21 14:02左国玉雷飞乔俊飞
高教学刊 2021年6期
左国玉 雷飞 乔俊飞
摘 要:新工科建设旨在培养多样化、创新型的卓越工程科技人才,高校作为人才培养的主要基地依然面临的问题是多数学生动手能力差,无法解决实际问题。机器人科技竞赛因其具有前沿性、综合性、实践性等特点成为了培养创新型人才的主要手段和重要突破口。为了加强创新人才的培养,文章依据新工科的内涵与特征,构建了以机器人科技竞赛为依托,教师为引导、学生为主体,重视跨教学培养,双向交叉的知识发展、宽口径知识发展和可持续发展方向的培养模式。通过教学实践表明,该培养模式在提高学生综合学科知识能力的同时,也培养了学生的创新思维和创新实践能力,提升了新工科背景下创新型科技人才的培养能力。
关键词:新工科;机器人竞赛;创新人才;培养模式
中图分类号:C961 文献标志码:A 文章编号:2096-000X(2021)06-0044-04
Abstract: The purpose of new engineering construction is to cultivate diversified and innovative excellent talents engaged in engineering science and technology. As the most important talent training bases, colleges and universities still face the problem that most students have poor hands-on ability and cannot solve practical problems. Robot competition has become the main means and important breakthrough of training innovative talents because of its advanced, comprehensive and practical characteristics. In order to strengthen the training of innovative talents, based on the connotation and characteristics of new engineering, this paper constructs a teacher-guided and student-oriented training mode based on robot competition, focusing on cross teaching training courses, two-way cross knowledge, wide range knowledge and sustainable development. The teaching practice shows that the training mode not only improves students' comprehensive subject knowledge ability, but also cultivates students' innovative thinking and practical ability and improves the teacher's cultivating ability of innovative scientific and technological talents.
Keywords: emerging engineering education; robot competition; innovative talents; training mode
為了主动应对新的科技、新的产业模式、新的国际形势,推动我国创新发展,实现中华民族伟大复兴中国梦,从2017年2月,教育部积极推进新工科建设,目的培养造就一大批多样化、创新型卓越工程科技人才,满足我国战略发展的人才需求,增加国际竞争力[1]。新的科技、新的产业和新的经济革命迫切要求我国进行学科建设和高等工程教育改革,来应对未来的新的发展挑战,新工科建设是我国做出的重大战略抉择,是今后我国工程教育发展的新思维、新方式[2]。
新工科的内涵强调了多元化、积极性、战略性和创新性[2]。人才要以战略性的思维积极主动建立具有多元、系
统、开放的新型大工程。所以在人才培养中同时既不能脱离“工科”的本质,也要掌握好“新”这个取向,“新”要体现在新要求上,也要体现在新途径上。新要求具体是指人才结构上要从工程教育升级为攻击机制,也就是可以解决一些更复杂的问题,具有批判性的见解和思维,具有领导力,家国情怀等。新途径则需要人才既有继承也要有创新,学习优秀的中国传统文化的同时也要改革创新,注重多学科交叉融合,高校协调发展和教育成果共享等方式方法。
新工科的核心要素包含新理念、新技术、新模式[3]。新模式即新的人才培养模式,要求培养出具有高度社会责任感、高的科学素质、自我学习能力和可以解决实际复杂问题创新型人才,这是成功建设新工科的关键,也是高等教育的重要任务。
一、国内人才培养模式现状
自教育部发通知以来,各个高校积极响应,举行“新工科建设”的研讨会,在新工科专业方面和培养模式方面进行了改革,积极推进新工科的建设。陈慧在关于综合性大学培养新工科人才的思考与探索的论文中以中山大学为例,提出了新学科专业的布局的建设,以及新工科专业建设的新思路[4]。顾佩华教授以汕头大学为例[5],提出了新工科建设的技术路径,在将新工科理念融入现有的培养模式后,提高了教学质量,也加强了学生的学习积极性。南京理工大学也在新工科的背景下,提出了以学生为中心的“一纵三横”的创新人才培养模式[6]。
我国的高等工程教育一直都在改革,相比于过去也取得了一定的成就,但是仍然存在的一个关键问题是人才培养的周期跟不上技术的进步和更替。传统的课堂授课模式通常为教师在课堂上讲知识点,学生学习,各个专业相互独立,学生与老师的互动较少,虽也有少量的实践,但模式也比较固定,综合性不足,无法适应对新型实践人才的培养[7]。另一个关键问题是技术和知识的更替速度越来越快,传统的教材与现在的工程实践存在脱节问题,新技术的特征是学科交叉融合,所以要培养学生复合型专业素养,学习新技术、新知识的能力。教学体系建设和改革的最大问题还是教学体系和实践的结合不足,导致学生的动手能力差,无法独立的解决问题。为了解决上述问题,必须要建立新的人才培养模式,为人才培养寻找新方式、新思路。
二、培养模式的设计与实验平台
培养模式设计的核心不能脱离新工科的内涵、创新人才的要求和培养模式的概念,比如要具有批判性的见解和思维,能将知识应用于实践进行再创造。好的培养模式要有好的平台进行实施,机器人科技竞赛作为培养人才的第二课堂,因其具有涉及的知识多,综合性强,实践性高等特点,所以本文将机器人科技竞赛作为此培养模式的载体。
(一)培养模式的设计原理
培养模式设计的目的是培养出在新工科背景下,面向新兴产业专业的应用型工程科技创新人才,如人工智能、智能制造、机器人、云计算等,所以要先对创新人才的特点进行分析[3]。
首先,创新人才需要具有强烈的创新意识和创新能力,有了创新意识和能力才可进行创造性的活动,这是创新人才最基本的特征。其次,创新人才也要具有突出的学习能力,快速掌握新知识、新技能,并将其消化吸收应用于创新实践中。最后,创新人才要具有强烈的开拓意识与进取心,尊重知识,崇尚真理,不会随波逐流,不易受固有观点的束缚,敢于接受挑战[7]。这些特征既符合新工科建设的现实需要,也是一个国家人才素质结构变化的基本特点。
培养模式是指按照一定的教育思想理论,为实现培养目标而采取的培养过程的某种标准构造样式和运行方式[8]。培养模式中关键的是培养模式的要素。对培养模式的改革和创新,实则就是对培养模式要素的改变。培养模式主要有八个基本要素:人才培养理念、专业设置模式、课程设置方式、教学制度体系、教学组织形式、教学管理模式、隐形课程形式和教学评价方式。本文中的培养模式就是通过对新工科内涵与特征的分析,根据创新人才的特点,对培养模式中某些要素的改革和强调。
(二)培养模式的载体——机器人科技竞赛
大学生科技竞赛作为培养创新型人才的主要手段和重要突破口,对学生、教师、高校的学风建设具有重要意义。本文设计的培养模式选择机器人科技竞赛作为载体,主要有以下几点原因。
1. 机器人科技竞赛涉及的知识方向比较多,实现过程主要依靠学生自己学习,重视独立完成任务。在此过程中,学生的学习兴趣可以得到有效的提高,并且自主学习能力和实践动手能力也可以得到一定的锻炼,而实践创新能力也是新工科建设的内在要求。
2. 机器人科技竞赛围绕着人工智能和机器人等专业,而这些专业是新工科专业的主要组成部分,机器人科技竞赛可以在一定程度上促进大学生对新工科专业的理解、学习和应用。
3. 机器人科技竞赛的相关技术越来越新颖和前沿,在学生提高能力的同时,教师作为和学生密不可分的一部分,也会在很大程度上提高教师的专业技术,提高高校的教研水平。
4. 学生通过科技竞赛获得优异成绩,加强学生学习的动力,营造良好的校园学习氛围,促进师生之间的交流,使高校学风建设由此得到有机统一[9]。
三、以机器人科技竞赛为依托创新人才培养模式研究
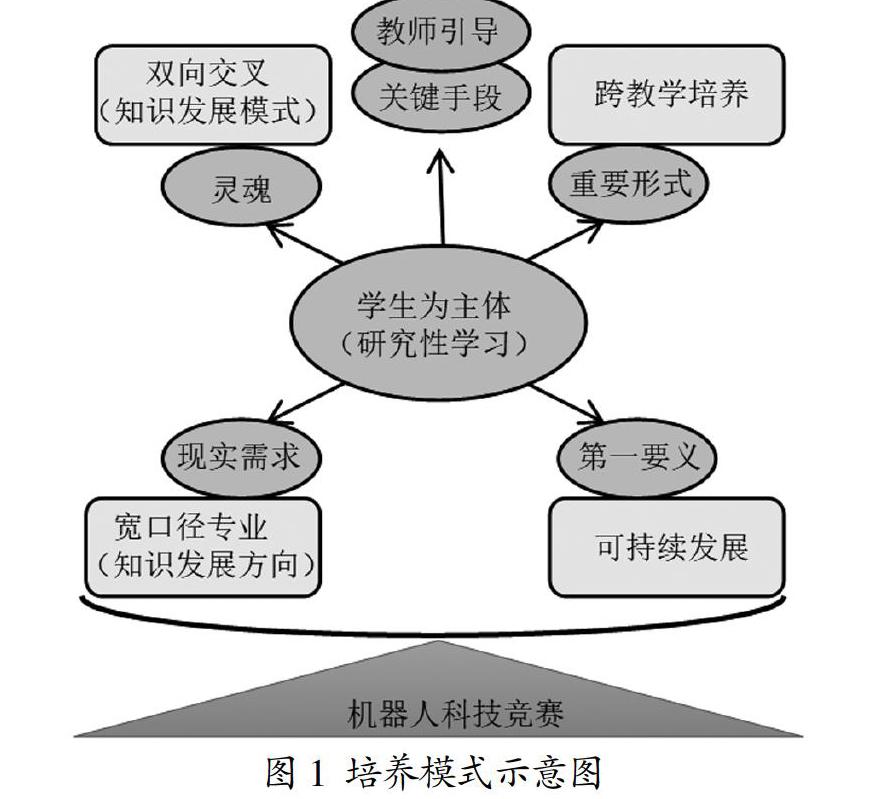
此培养模式依托机器人科技竞赛,培养模式的内容是教师为引导、学生为主体,重视跨教学培养形式,具有双向交叉知识发展模式、宽口径知识发展方向和可持续发展方向,如图1所示,目标是培养出具有创新意识、创新精神、创新思维和创新能力,能独立的创造性开展工作、创造性的解决实际问题的创新型人才。
(一)教师引导策略
教师引导是培养模式的关键手段。文献[2]阐述的新工科的内涵中,对于如何建设新工科也强调了要持续改进以学生为中心,也包含老师、雇主、校友等的培养体系。对于机器人科技竞赛,教师必须要做好引导工作。教师可开设机器人兴趣小组,为了对机器人有浓厚兴趣的学生搭建一个平台,也要鼓励全校学生报名参加,尤其是一些还没有机会接触过机器人学习的学生,通过参加机器人兴趣小组,了解机器人学习器材及竞赛规则,并在专业教师的指导下,进行简单的机器人搭建及编程学习,为机器人学习打开大门。校方应提供必要的硬件设施,实验平台,这样才能保证学生在课余时间进行搭建尝试。教师也应组织一些阶段性的机器人培训,可以根据学生学习程度的不同,分不同难易的小组,进行针对性的练习。对于简单的小组可进行普通的结构搭建等任务训练,对于难一点的小组,可以进行一定程度的编程训练、功能实现等。也可邀请专业的培训师到校开展讲座。在具体的研究过程中,教师要通常提供给学生分析问题的切方向和思路,也要给出参考资料或者文献的获取途径,同时还要主动组织学生进行学习研究。
(二)学生为主体的研究性学习方法
学生为主体的研究性学习方法是整个培养模式的核心,新工科的新也要体现在新的学习方法上。与过去传统的方法不同,过去学生通常为被动的接受老师上课讲的内容,现在则要求学生积极主动的去汲取知识,进行实践。师生之间的关系也由原来的“权威-遵从”转变为合作共赢。具体在机器人科技竞赛中的体现为,学生面对競赛中实际问题,主动的去分析和研究,在解决问题的过程中学习知识,应用知识和更新知识。在机器人科技竞赛中探究性学习方法的主要过程为:提出问题-寻求解决问题的方法-学习相应的知识-采取方法解决问题-评估方法-改进方法。通过这样的一个过程,学生循序渐进的完成竞赛中的多项训练[10]。
(三)跨教学培养形式
跨教学培养形式是培养过程的重要形式。通常是指在不是正规课程所教受的知识。新的教学方法也是新工科建设所需要的。在竞赛长达数月的过程中,学生通常以小组的形式在一起进行实践,教师在此过程进行指导。这是科技竞赛的主要学习形式,也是科技竞赛中主要的跨教学培养形式。这种教学培养模式的优点是在一定程度上不受时间和空间的的限制,组内成员甚至可以随时发起讨论,时间短,见效快。跨教学培养形式在很大程度上决定着参与竞赛的同学的学习兴趣,并在逐步解决问题的过程中,可以使学生体会到自身的价值感和学习的愉悦感。跨教学培养形式虽然是无计划性的,但并不是盲目的,教师可以着意有计划的去营造出对学生有利且高质量的跨教学培养课程[11]。
(四)双向文叉方式的知识发展模式
知识发展方式是培养模式的灵魂。通常知识发展方式是指知识与学生之间在培养过程中形成的相对关系,学生学习知识,也可以利用知识去解决问题,对知识进行再创造。过去的知识发展模式往往是单向的,学生从教师学到知识,通常不会对知识进行再创造。在此培养模式中要求学生从教师、竞赛实践中获取知识,同时被要求利用学到的知识进行创造性的设计,不只是简单的进行功能的实现而是要进行科学的研究,通过这样的知识发展模式也培养了学生的科研精神,追求科学的态度,这也是“新工科”人才培养和高等教育的内在要求[8]。
(五)宽口径知识发展方向
宽口径知识发展方向指专业的口径增大,学科专业融合,即所谓的“淡化专业界限多学科交叉”,这是人才培养的现实需求,也是当代高等教育的发展趋势[12]。新工科中新模式里强调了“多学科-交叉学科”,机器人竞赛涉及机械工程、电子科学与技术、控制科学与工程、计算机科学与技术等约7个博士授权或硕士授权一级学科、10多个二级学科[13]。如中国机器人大赛涵盖数字电子技术、模拟电子技术、电路、单片机原理与应用、自动控制原理、C语言程序设计、机械原理等多门课程。学生在学习过程中,只有打破课程甚至专业之间的壁垒,融会贯通,建立良好的知识体系,才能打造出集材料、机械、控制等交叉学科于一体的科技竞赛作品[14],才能培养出新工科建设所要求的能力。
(六)可持续发展教育
发展是第一要务,可持续发展教育是新工科建设中创新人才培养的突破口,这就要求培养出学生后续学习与终身发展需要的学习能力,这与科技竞赛的最终目的也是一致的。就是学生通过参加比赛要培养出专业的且具有创新思维的自主学习意识和能力,科技竞赛大部分都是以团队的形式参加,所以也可培养学生的团队精神,这些能力对于学生后续发展都是至关重要的。
四、以机器人科技竞赛为依托创新人才培养模式的实践
该培养模式以导师为指导,以学生为主体,依托北京工业大学机器人创新创业基地和导师科研项目计划,研学一体,完成多项机器人作品的研究与开发,部分成果参加了“挑战杯”、国际自主智能机器人大赛、世界机器人大赛、中国机器人大赛、全国大学生计算机博弈大赛等各项赛事,取得了显著效果。
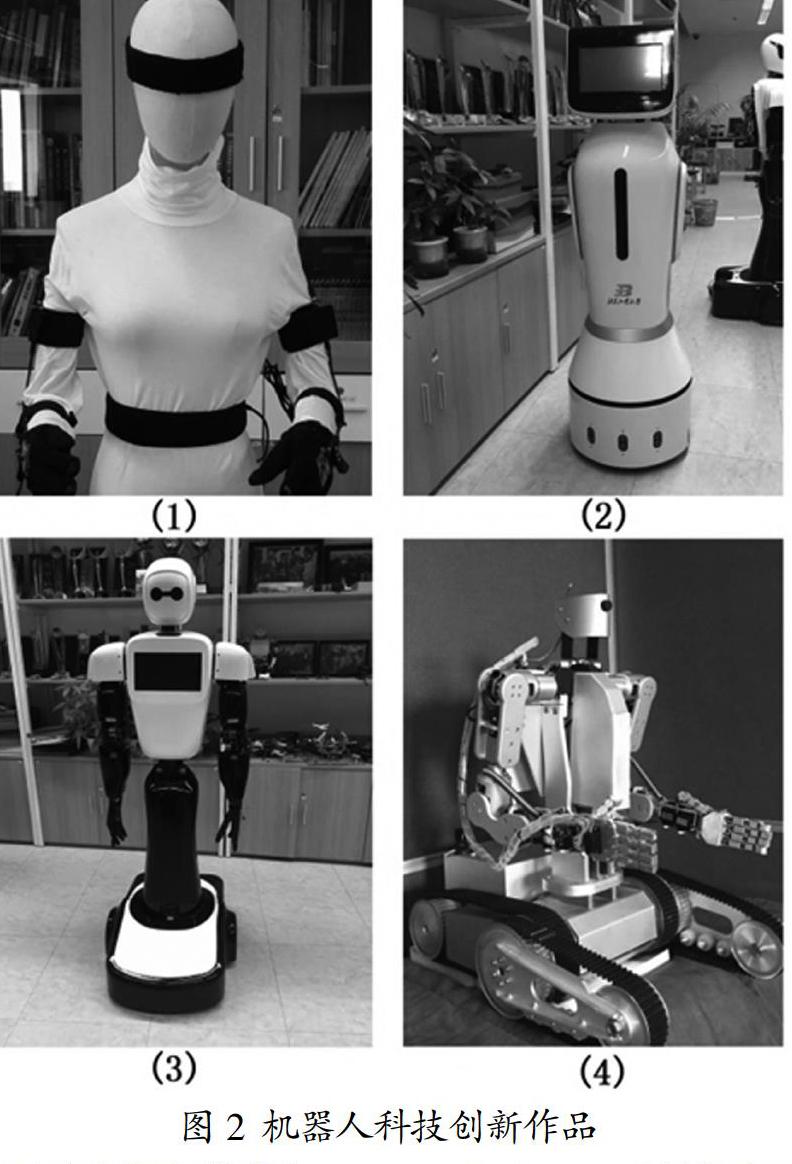
图2所示为自主研发的机器人科技创新作品示例,其中(2)为迎宾机器人,可以实现自主导航、语音交互、人脸识别等功能,(3)是半身人形智能服务机器人,在自主控制的模式下可以实现语音交互、人脸识别、自主导航、目标抓取等功能,遥操作控制的模式下配有人体姿态采集服,如图2(1)所示,操作者可对机器人本体进行远程操作,可实现机器人的机械臂和操作者的手臂同步摆动。图2(4)是
“外骨骼式主从机器人遥控操作系统”,此作品获得了“挑战杯”全国大学生课外科技学术作品竞赛特等奖。该机器人可以完全复现人体动作,在家庭服务、助老助残、康复护理、公共安全领域有着广泛的应用前景。并且这些自主研发的遥操作机器人、蛙式仿生机器人、两轮电动代步车等作品,多次在世界机器人大会和国际工业博览会等大型科技展会上进行了展出,取得良好的社会影响。
近些年来,教师指导学生科技团队通过参加多项国家级和其他全国性学生科技竞赛,获得如“挑战杯”全国赛特等奖、首都“挑战杯”一等奖等,以及世界机器人大赛总冠军、机器人世锦赛金奖、中国机器人大赛一等奖等40余项。学生获得校“科技之星”7人、校长奖学金集体奖4项以及其他重要奖项,充分展现了学生科技创新素质和创新能力培养的结果,证明了该培养模式在创新人才培养模式改革中所起到的阶段性作用。
通过参加新技术(Emerging Technology)创新实践类型的科技竞赛,跨专业宽口径培养的特点得以充分体现,不仅锻炼和培养了学生在计算机、控制、信息处理、机械设计等方面的专业技能,提高了学生的硬件、软件、算法、建模等具有学科综合特点的相关能力,而且培养了学生解决问题的能力、团队协作与独立工作的能力、组织与协调的能力等综合性素质,更重要的是培养了学生的创新思维和创新实践能力,也在一定程度上促进了学生参与创新实践活动的积极性,为新工科的专业建设培养出越来越多的创新型科技人才。
五、结束语
本文从新工科建设的内涵出发,强调人才培养的必要性,根据培养模式的基本要素,提出了以机器人竞赛为依托的创新人才培养模式。该模式分别从教学模式,学习方法,知识发展模式,知识发展方向等多个角度对培养模式进行改革和强调,通过实践论证了该培养模式的有效性。全国高校在人才培养方面一直进行着改革,培养创新人才任重而道远。根据实践证明,要培养出具有综合素质的高层次人才,必然要以学生为中心,以综合能力培养为导向,但其中不可忽视的是,仅依靠优质的培养模式是远远不够的,还必须有优秀的师资将其付诸实施,这样才能做好新时代人才培养的任务,才能更好的实现我国从大国向强国的转变。
参考文献:
[1]“新工科”建设复旦共识[J].高等工程教育研究,2017(01):10-11.
[2]钟登华.新工科建设的内涵与行动[J].高等工程教育研究,2017(03):1-6.
[3]李华,胡娜,游振声.新工科:形态、内涵与方向[J].高等工程教育研究,2017(04):16-19+57.
[4]陈慧,陈敏.关于综合性大学培养新工科人才的思考与探索[J].高等工程教育研究,2017(02):19-23+47.
[5]顾佩华.新工科与新范式:概念、框架和实施路径[J].高等工程教育研究,2017(06):1-13.
[6]张树鹏,钟秦,葛玲玲,等.“新工科”视角下以学生为中心“一纵三横”创新人才培养模式[J].大学化学,2019,34(11):103-107.
[7]李雨洁.高校创新人才评价研究[J].中国市场,2019(35):183-184.
[8]龚怡祖.略论大学人才培养模式[J].高等教育研究,1998(1):43-46.
[9]张莉,王江华.以机器人竞赛为平台 提高大学生创新实践能力[J].科技风,2019(26):32+35.
[10]林健.注重卓越工程教育本质 创新工程人才培养模式[J].中国高等教育,2011(06):19-21.
[11]董泽芳.高校人才培养模式的概念界定与要素解析[J].成才之路,2015(15):19-21.
[12]李丽娟,杨文斌,肖明,等.跨学科多专业融合的新工科人才培养模式探索與实践[J].高等工程教育研究,2020(01):25-30.
[13]李锐,刘云清.依托机器人竞赛构建大学生创新实践教育平台[J].长春师范大学学报,2019,38(06):153-156.
[14]吕成绪,汪小旵,卢伟.依托科技竞赛培养创新人才——以南京农业大学工学院为例[J].高校实验室科学技术,2019(03):98-100.
猜你喜欢
计算机教育(2017年8期)2017-09-01
科技视界(2017年10期)2017-08-21
电脑知识与技术(2017年16期)2017-07-14
职业(2016年10期)2016-10-20
启迪与智慧·教育版(2016年8期)2016-10-20
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
成才之路(2016年25期)2016-10-08
成才之路(2016年25期)2016-10-08
成才之路(2016年25期)2016-10-08
