基于MATLAB神经网络的压气机特性曲线推测
2021-06-21 07:05禹化雨张锦扬任宏彬潘孟豪
卷宗 2021年14期
孙 磊 禹化雨 张锦扬 任宏彬 潘孟豪
(中国矿业大学(北京),北京 100083)
压气机的特性曲线是指压气机的压比和效率,随压气机进口空气流量和转速变化的曲线,它反映了压气机转速、流量、压比和效率的关系。压气机特性曲线是压气机模型部件中最核心最困难的一部分,目前国外坚持对我国技术封锁,压气机特性曲线的数据获取的最常用方法是实际测量和仿真得出,但实际测量工作量大,成本大,因此压气机特性曲线的仿真研究至关重要。大连理工的谢心喻通过BP神经网络建立压气机特性曲线模型进而研究了单轴燃气轮机的动态性能得出BP神经网络相比最小二乘法的精度更高,耗时更长[1]。大连海事大学的姜瑞政采用差分优化算法的神经网络来研究压气机特性曲线,提高了神经网络拟合压气机特性曲线的泛化能力和搜索精度[2]。这些研究都是从单一的神经网络来研究压气机特性曲线,没有考虑到不同神经网络的拟合结果差异。本文从BP神经网络和RBF神经网络两个角度来研究压气机特性曲线,比较两种方法的适应性。
1 神经网络研究压气机特性曲线
神经网络要解决的问题是通过已知数据,反复训练神经网络,得到权值和偏值,使得神经网络的计算输出信号与实际期望输出信号误差最小[3]。可以充分利用已知数据去推测整个系统运行的过程,且得到的结果较为准确,是一种较适合的方式使得误差的平方和最小,是研究压气机特性曲线的重要工具[4]。研究技术路线如图1所示。
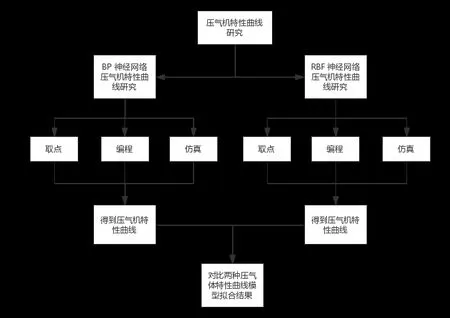
图1 压气机特性曲线研究技术路线图
1.1 BP神经网络压气机特性曲线研究
1)取点。利用getdada软件,在图2所示的已知压气机特性曲线图上取点。神经网络获取的原始数据越多,其准确性也会相应提高,为了提高拟合的效果和精确度,这里在每条曲线上取15个数据点。

图2 压气机特性曲线取点
2)建模。训练函数选用trainbr,隐含层神经元节点个数设为20,建立BP神经网络。这里的隐含层神经元个数不能太少,否则网络不能很好的学习,需要训练的次数也多,训练的精度也不高;隐含层的神经元个数越多,能够实现的功能也越强大,但也不宜太多,否则训练时间会大大延长。其次,为了提高精度将训练次数设为10000次,训练误差设为0.0001,学习效率设为0.01。最后为了方便数据采集工作,在BP神经网络的基础上添加一个数据读取模块,达到通过输入相应的折合转速和折合流量得到对应的折合压比的效果[5]。同时,为了防止所采集的数据处于熄火边界以下或喘振边界以上,需要限定压气机的工作区域。
3)仿真。图3所示的是BP网络训练的误差与迭代次数之间的关系图。整个训练过程迭代了26次,在第26次迭代训练完成后,网络拟合的误差达到了要求的精度,网络训练的均方差为8.8059e-06,设置的误差要求为0.0001。网络训练的时间为2.1秒,可以看出BP网络训练的结果精度较高,有比较大的实际使用价值。图4为BP网络训练结果图。从图中可以出拟合结果与实际数据基本吻合,达到了训练的目的,本次BP神经网络仿真达到了预期的效果。
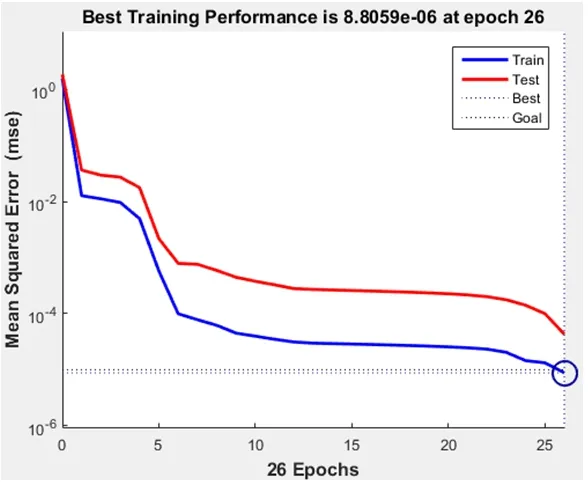
图3 BP网络训练的误差与迭代次数关系图
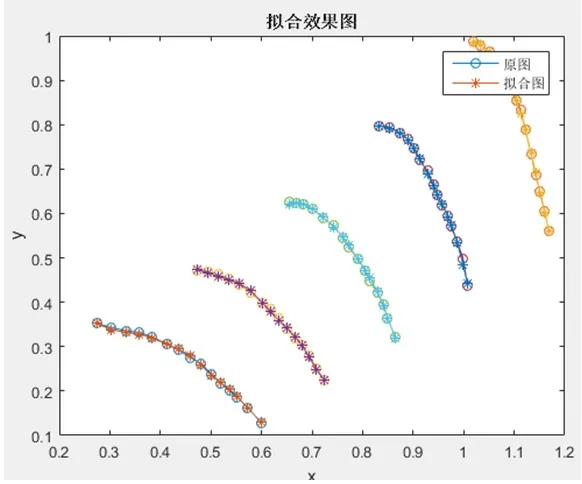
图4 BP网络训练结果图
1.2 RBF神经网络压气机特性曲线研究
RBF神经网络的取点过程与BP神经网络的方法相同,且为保证两种神经网络的仿真具有严谨的可比性,将RB神经网络中的训练函数、隐含层神经元节点个数、训练次数、训练误差以及学习效率都设置为同等值。
图5所示的是RBF网络训练的误差与迭代次数之间的关系图。整个训练过程迭代了23次,在第23次迭代训练完成后,网络拟合的误差达到了要求的精度,网络训练的均方差为9.9954e-06,设置的误差要求为0.0001。网络训练的时间为1.7秒,图6为RBF网络训练结果图。从图中可以出拟合结果与实际数据基本吻合,也达到了训练的目的。
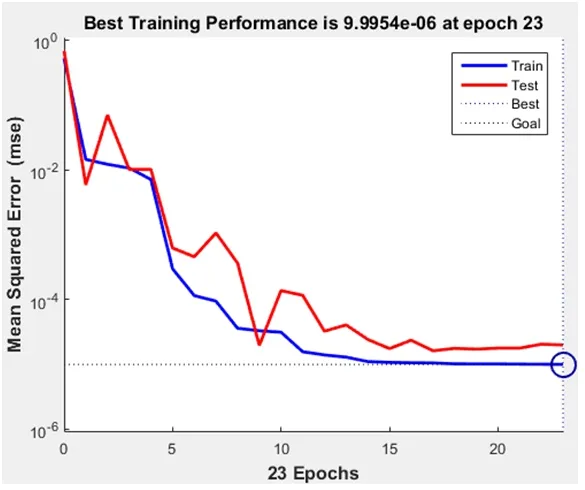
图5 RBF网络训练的误差与迭代次数关系图
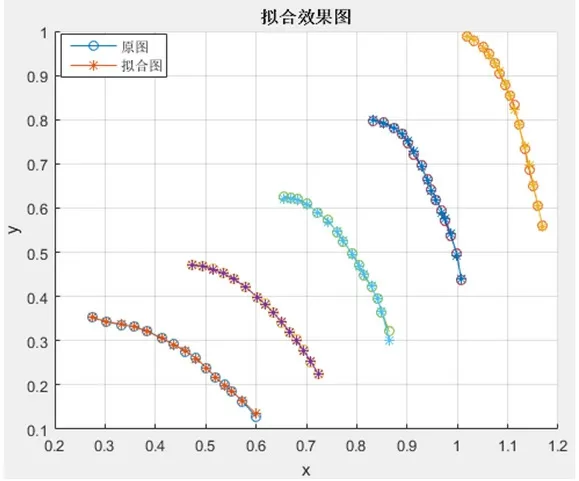
图6 RBF网络训练结果图
2 两种神经网络研究压气机特性曲线仿真比较
两种压气机特性曲线都能完成预定目标精度,仿真结果都很可靠,网络训练结果与原数据几乎吻合。表1为两种神经网络比较表,从表中可以直观地看出,BP神经网络迭代次数多余RBF神经网络,因此网络的训练时间也比RBF神经网络长0.4秒,相应的训练精度也提高了约1.1e-06。

表1 两种神经网络比较
压气机特性曲线作为压气机部件最为重要的研究对象,对压气机性能起着决定性作用。本文研究的压气机特性曲线为后续的压气机部件研甚至最终的燃气轮机整机研究奠定了研究基础[6]。
3 结论
本文使用的BP和RBF两种神经网络在压气机特性曲线的仿真研究中表现优越,通过仿真结果得到结论如下:
BP神经网络训练的结果精度更高,为压气机特性曲线仿真提供一种高精度方法,但获取高精度的同时也增加了时间成本,尤其在更为复杂的压气机特性曲线的仿真时,时间成本会进一步提高。
RBF神经网络训练耗时短,为压气机特性曲线仿真提供一种高效率方法,但伴随而至的是精度相对降低,在高精度的仿真中BP神经网络的优点更为突出。
猜你喜欢
燃气涡轮试验与研究(2021年4期)2022-01-18
现代畜牧科技(2021年4期)2021-07-21
航空发动机(2021年1期)2021-05-22
航空发动机(2020年3期)2020-07-24
电子制作(2019年19期)2019-11-23
家庭影院技术(2018年9期)2018-11-02
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
燃气轮机技术(2014年4期)2014-04-16